2. Устройство по п. 1, отличающееся тем, что дугообразная рама закреплена на самоходной тележке посредством наклонных стоек.
3. Устройство по п. 1, отличающееся тем, что ходовая часть, вентиляторы, кривошипы и приводы установлены на пылевой камере.
1. УСТРОЙСТВО ДЛЯ УБОРКИ ПРОСЫПИ ПОД КОНВЕЙЕРОМ, включающее установленную на направляющих става конвейера ходовой частью самоходную тележку с расположенными на ней рамой, пылевой камерой с затвором и с фильтром и вентиляторами, сообщенными гибкими всасывающим и нагнетательным трубопроводами с приемниками просыпи, соединенными с механизмом их перемещения и / ////i //// //// / / iy/Mwf////////)j /////////// « я А, ющими диффузоры и конфузоры, отличающееся тем, что, с целью повышения производительности и снижения трудоемкости уборки просыпи, рама выполнена дугообразной с опорными роликами, а механизм перемещения приемников просыпи выполнен в виде двух выдвижных дугообразных держателей с направляющими, в которых расположены опорные ролики, и привода с кинематически связанными с ним кривошипами, расположенными под углом одни к другому симметрично относительно продольной оси става конвейера и имеющими продольные прорези, при этом дугообразная рама и выдвижные дугообразные держатели расположены в вертикальной плоскости и на нижнем конце каждого выдвижж ного дугообразного держателя щарнирно закреплен приемник просыпи с возможностью его расположения под конвейером, а верхние части выдвижных дугообразных держателей имеют пальцы, расположенные в продольных прорезях кривошипов. оо о со 1C 1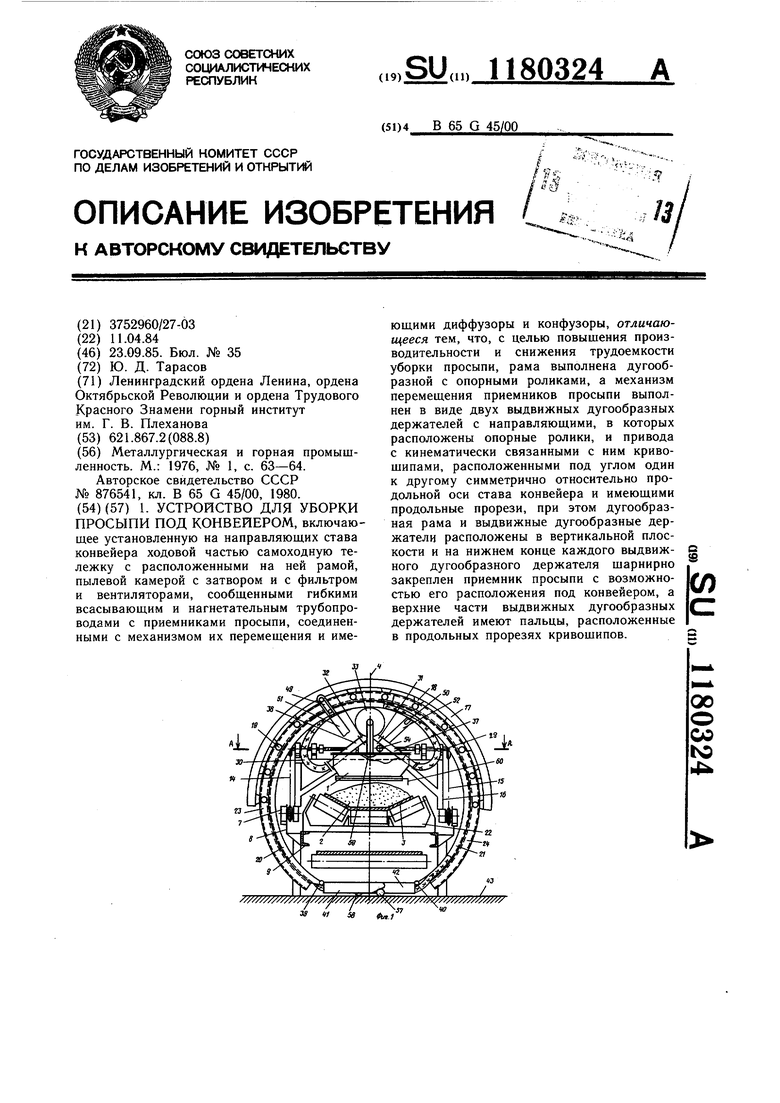
Изобретение относится к конвейеростроению, а именно к устройствам для уборки просыпи под конвейерами, и может быть ис пользовано в различных отраслях промыш ленности при транспортировании ленточными конвейерами сухих сыпучих грузов.
Целью изобретения является повышение производительности и снижение трудоемкости уборки просыпи.
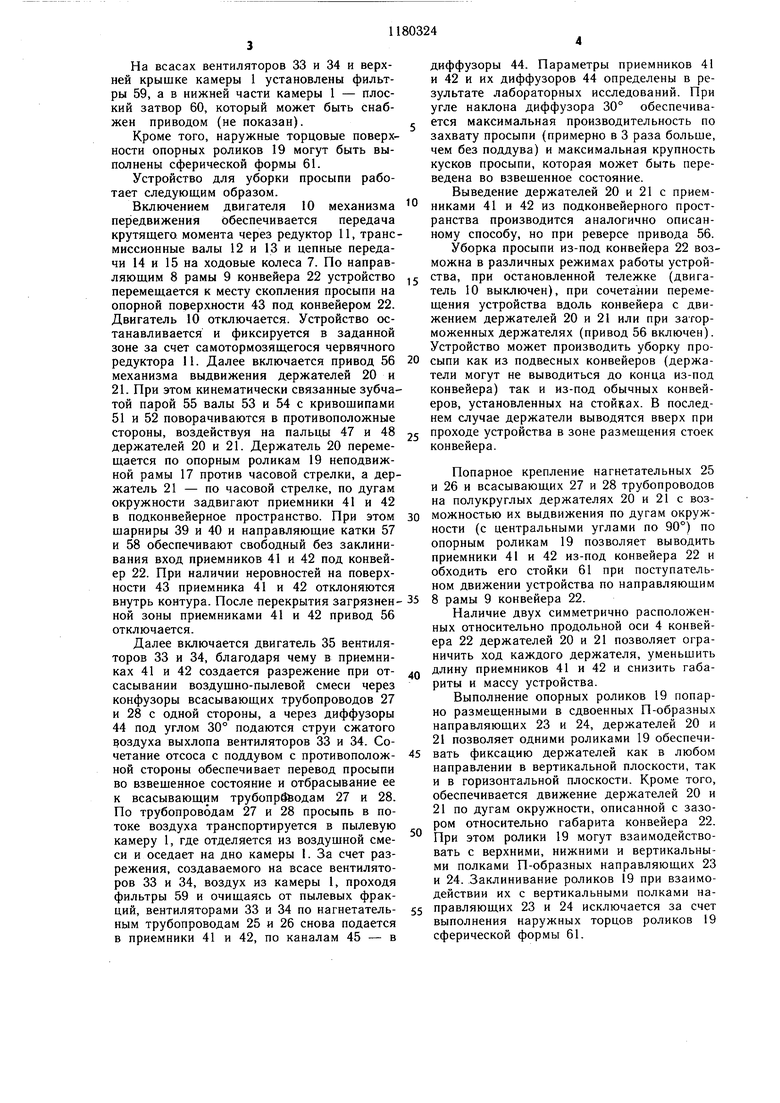
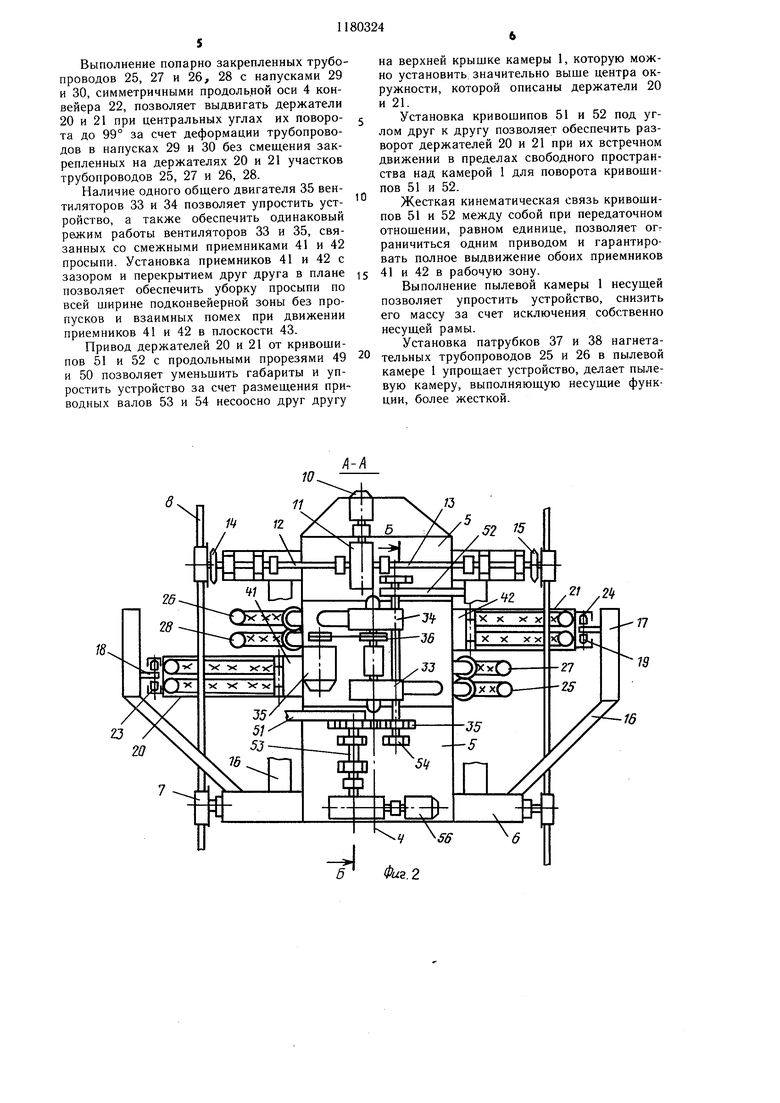
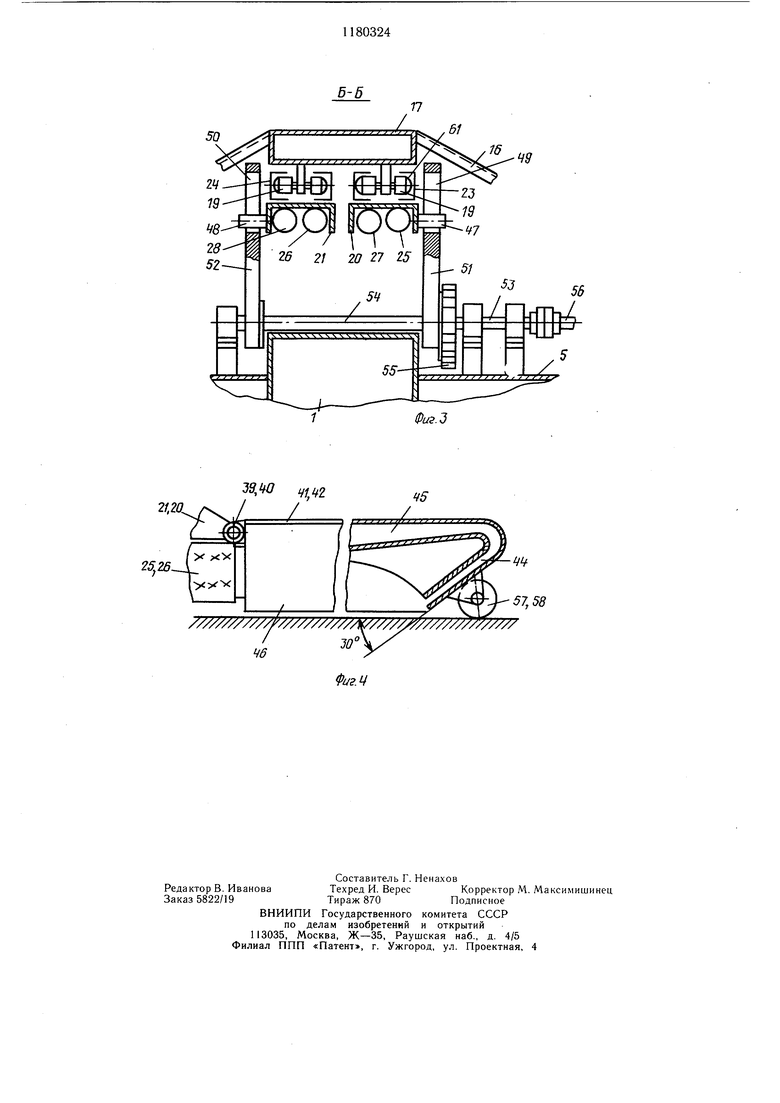
На фиг. 1 изображено устройство для уборки просыпи под конвейером; общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - приемник просыпи.
Устройство для уборки просыпи под конвейером состоит из пылевой камеры 1, выполненной в виде несущей конструкции и размещенной с зазором над заполненной транспортируемым грузом 2 грузонесущей лентой 3 конвейера симметрично продольной оси 4 конвейера. Камера 1 имеет призматическую форму. Закрепленные на торцовых стенках камеры 1 площадки 5 снабжены кронщтейнами 6, на концах которых с возможностью вращения установлены ходовые колеса с ребордами 7. Колеса 7 опираются на направляющие 8 рамы 9 (става) конвейера. На одной из площадок 5 камеры 1 установлен привод передвижения, включающий двигатель 10, червячный редуктор 11, трансмиссионные валы 12 и 13 и цепные передачи 14 и 15.
На кронщтейнах 6 пылевой камеры 1 с помощью наклонных стоек 16 закреплена рама 17, прогнутая по дуге окружности с центральным углом 180°. Рама 17 снабжена кронштейнами 18 с попарно установленными на них опорными роликами 19. Концентрично относительно рамы 17 установлены два выдвижных держателя 20 и 21 коробчатого сечения, охватывающих с двух сторон по дугам окружности конвейер 22. Выдвижные держатели 20 и 21 снабжены по наружному периметру сдвоенными П-образными направляющими 23 и 24, в которых размещены опорные ролики 19 рамы 17.
В обоих держателях 20 и 21 закреплены попарно нагнетательные 25 и 26 и всасывающие 27 и 28 трубопроводы, выполненные в виде гибких (гофрированных) шлангов.
Верхние концы гибких трубопроводов 25-28 с напусками 29 и 30, симметричными продольной оси 4 конвейера 22, попарно соединены соответственно с пылевой каме рой 1 и выхлопами 31 и 32 двух вентиляторов 33 и 34, закрепленных на верхней крышке пылевой камеры 1, Вентиляторы 33 и 34 имеют один общий двигатель 35, связанный с ними ременной передачей 36. При этом патрубки 37 и 38 нагнетательных трубопроводов 25 и 26 пропущены через пылевую камеру 1.
На нижних концах выдвижных держателей 20 и 21 с помощью шарниров 39 и 40 закреплены приемники 41 и 42 просыпи с возможностью их поворота внутрь контура. Приемники 41 и 42 просыпи в максимально выдвинутом (навстречу друг другу) положение перекрывают друг друга в плоскости 43 опирания конвейера 22 и расположены с зазором друг относительно друга.
Приемники 41 и 42 снабжены диффузором 44, соединенным каналом 45 с нагнетательным трубопроводом 25(26) и распределителем 46 потоков. Диффузор 44 наклонен к плоскости 43 опирания (нижнему срезу приемника 41(42) под углом 30°.
Выдвижные держатели 20 и 21 снабжены пальцами 47 и 48 с возможностью их взаимодействия с продольными прорезями 49 и 50 кривощипов 51 и 52, установленных под углом один к другому симметрично продольной оси 4 конвейера 22.
Величина этого угла определяется максимальным ходом держателя 2(21) с приемником 41(42) из условия полного вывода приемника за пределы габарита конвейера 22. Кривошипы 51 и 52 закреплены на валах 53 и 54, кинематически связанных между собой зубчатой парой 55 с передаточным отношением, равным единице.
Один из валов 53 кинематически связан с приводом 56.
Приемники 41 и 42 просыпи снабжены на правляющими катками 57 и 58 с возможностью их взаимодействия с плоскостью 43 опирания. Катки 57 и 58 закреплены на передних стенках приемников 41 и 42.
На всасах вентиляторов 33 и 34 и верхней крышке камеры 1 установлены фильтры 59, а в нижней части камеры 1 - плоский затвор 60, который может быть снабжен приводом (не показан).
Кроме того, наружные торцовые поверхности опорных роликов 19 могут быть выполнены сферической формы 61.
Устройство для уборки просыпи работает следующим образом.
Включением двигателя 10 механизма передвижения обеспечивается передача крутящего, момента через редуктор 11, трансмиссионные валы 12 и 13 и цепные передачи 14 и 15 на ходовые колеса 7. По направляющим 8 рамы 9 конвейера 22 устройство перемещается к месту скопления просыпи на опорной поверхности 43 под конвейером 22. Двигатель 10 отключается. Устройство останавливается и фиксируется в заданной зоне за счет самотормозящегося червячного редуктора 11. Далее включается привод 56 механизма выдвижения держателей 20 и 21. При этом кинематически связанные зубчатой парой 55 валы 53 и 54 с кривощипами 51 и 52 поворачиваются в противоположные стороны, воздействуя на пальцы 47 и 48 держателей 20 и 21. Держатель 20 перемещается по опорным роликам 19 неподвижной рамы 17 против часовой стрелки, а держатель 21 - по часовой стрелке, по дугам окружности задвигают приемники 41 и 42 в подконвейерное пространство. При этом шарниры 39 и 40 и направляющие катки 57 и 58 обеспечивают свободный без заклинивания вход приемников 41 и 42 под конвейер 22. При наличии неровностей на поверхности 43 приемника 41 и 42 отклоняются внутрь контура. После перекрытия загрязненной зоны приемниками 41 и 42 привод 56 отключается.
Далее включается двигатель 35 вентиляторов 33 и 34, благодаря чему в приемниках 41 и 42 создается разрежение при отсасывании воздущно-пылевой смеси через конфузоры всасывающих трубопроводов 27 и 28 с одной стороны, а через диффузоры 44 под углом 30° подаются струи сжатого Эоздуха выхлопа вентиляторов 33 и 34. Сочетание отсоса с поддувом с противоположной стороны обеспечивает перевод просыпи во взвешенное состояние и отбрасывание ее к всасывающим трубопрЗбодам 27 и 28. По трубопроводам 27 и 28 просыпь в потоке воздуха транспортируется в пылевую камеру 1, где отделяется из воздущной смеси и оседает на дно камеры 1. За счет разрежения, создаваемого на всасе вентиляторов 33 и 34, воздух из камеры 1, проходя фильтры 59 и очищаясь от пылевых фракций, вентиляторами 33 и 34 по нагнетательным трубопроводам 25 и 26 снова подается в приемники 41 и 42, по каналам 45 - в
диффузоры 44. Параметры приемников 41 и 42 и их диффузоров 44 определены в результате лабораторных исследований. При угле наклона диффузора 30° обеспечивается максимальная производительность по захвату просыпи (примерно в 3 раза больше, чем без поддува) и максимальная крупность кусков просыпи, которая может быть переведена во взвешенное состояние.
Выведение держателей 20 и 21 с приемниками 41 и 42 из подконвейерного пространства производится аналогично описанному способу, но при реверсе привода 56. Уборка просыпи из-под конвейера 22 возможна в различных режимах работы устройства, при остановленной тележке (двигатель 10 выключен), при сочетании перемещения устройства вдоль конвейера с движением держателей 20 и 21 или при заторможенных держателях (привод 56 включен). Устройство может производить уборку просыпи как из подвесных конвейеров (держатели могут не выводиться до конца из-под конвейера) так и из-под обычных конвейеров, установленных на стойках. В последнем случае держатели выводятся вверх при
проходе устройства в зоне размещения стоек конвейера.
Попарное крепление нагнетательных 25 и 26 и всасывающих 27 и 28 трубопроводов на полукруглых держателях 20 и 21 с возможностью их выдвижения по дугам окружности (с центральными углами по 90°) по опорным роликам 19 позволяет выводить приемники 41 и 42 из-под конвейера 22 и обходить его стойки 61 при поступательном движении устройства по направляющим
8 рамы 9 конвейера 22.
Наличие двух симметрично расположенных относительно продольной оси 4 конвейера 22 держателей 20 и 21 позволяет ограничить ход каждого держателя, уменьшить
длину приемников 41 и 42 и снизить габариты и массу устройства.
Выполнение опорных роликов 19 попарно размещенными в сдвоенных П-образных направляющих 23 и 24, держателей 20 и 21 позволяет одними роликами 19 обеспечивать фиксацию держателей как в любом направлении в вертикальной плоскости, так и в горизонтальной плоскости. Кроме того, обеспечивается движение держателей 20 и 21 по дугам окружности, описанной с зазором относительно габарита конвейера 22.
При этом ролики 19 могут взаимодействовать с верхними, нижними и вертикальными полками П-образных направляющих 23 и 24. Заклинивание роликов 19 при взаимодействии их с вертикальными полками направляющих 23 и 24 исключается за счет выполнения наружных торцов роликов 19 сферической формы 61.
Выполнение попарно закрепленных трубопроводов 25, 27 и 26, 28 с напусками 29 и 30, симметричными продольной оси 4 конвейера 22, позволяет выдвигать держатели 20 и 21 при центральных углах их поворота до 99° за счет деформации трубопроводов в напусках 29 и 30 без смещения закрепленных на держателях 20 и 21 участков трубопроводов 25, 27 и 26, 28.
1аличие одного общего двигателя 35 вентиляторов 33 и 34 позволяет упростить устройство, а также обеспечить одинаковый режим работы вентиляторов 33 и 35, связанных со смежными приемниками 41 и 42 просыпи. Установка приемников 41 и 42 с зазором и перекрытием друг друга в плане позволяет обеспечить уборку просыпи по всей ширине подконвейерной зоны без пропусков и взаимных помех при движении приемников 41 и 42 в плоскости 43.
Привод держателей 20 и 21 от кривощипов 51 и 52 с продольными прорезями 49 и 50 позволяет уменьшить габариты и упростить устройство за счет размещения приводных валов 53 и 54 несоосно друг другу
10 г/ /п - X W
на верхней крышке камеры 1, которую можно установить значительно выше центра окружности, которой описаны держатели 20 и 21.
Установка кривошипов 51 и 52 под углом друг к другу позволяет обеспечить разворот держателей 20 и 21 при их встречном движении в пределах свободного пространства над камерой 1 для поворота кривошипов 51 и 52.
Жесткая кинематическая связь кривошипов 51 и 52 между собой при передаточном отношении, равном единице, позволяет огт раничиться одним приводом и гарантировать полное выдвижение обоих приемников 41 и 42 в рабочую зону.
Выполнение пылевой камеры 1 несущей позволяет упростить устройство, снизить его массу за счет исключения собственно несущей рамы.
Установка патрубков 37 и 38 нагнетательных трубопроводов 25 и 26 в пылевой камере 1 упрощает устройство, делает пылевую камеру, выполняющую несущие функции, более жесткой. ч 6
3d,W
ч1,чг
////////////f////////////i //////////////////
Q°
46
| Металлургическая и горная промышленность | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Устройство для уборки просыпи под конвейером | 1980 |
|
SU876541A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
