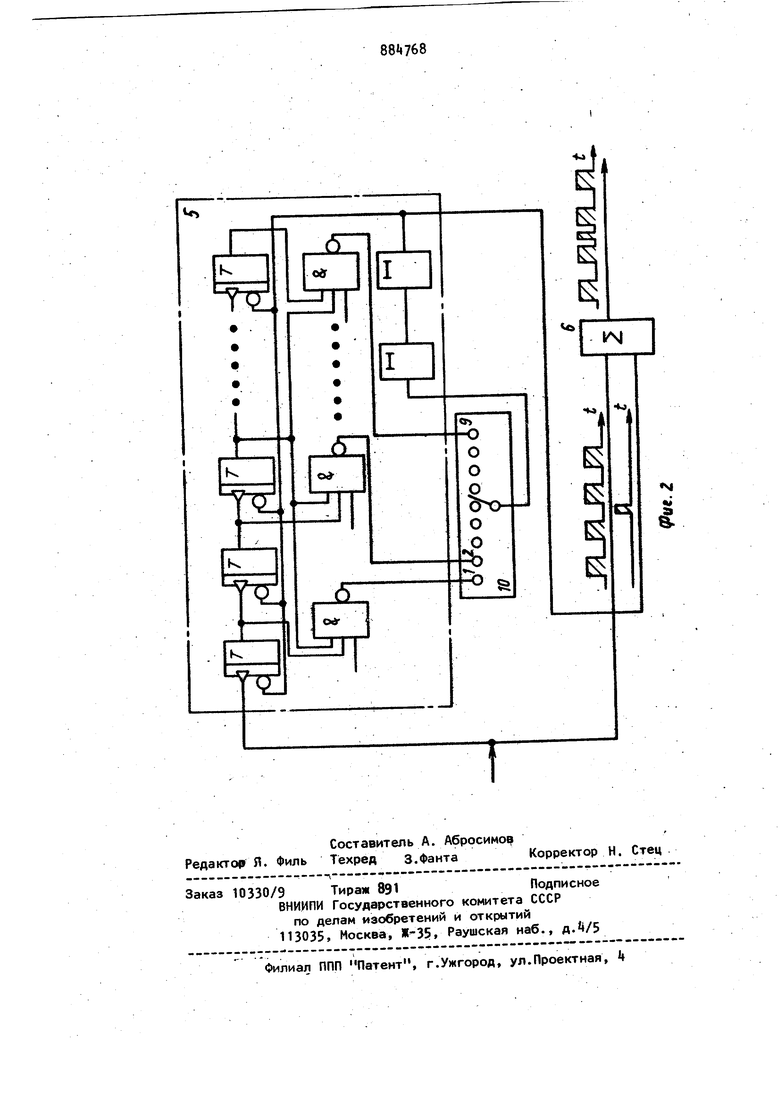
Изобретение относится к комплексному автоматическому упр1авлению электроприводами и может быть использовано для автоматического управления пра вильно-дрессировочными станами. Известны устройства управления, в котси ых для регулирования соотношения скоростей клетей непрерывных прокат- ных станов используются цифровые регуляторы стана и цифровые регуляторы клетей с реверсивныкм счетчиками, преобразователями код-аналог, неревер сивными счетчиками и логическим переключающим блоком tl 3Однако эти устройства сложнь и обеспечивают необходимой точности регулирования вытяжки полосы в соответствии с требованиями, предъявляемыми к правильно-дрессировочным станам. Наиболее близким по технической сущности к предлагаемому является устройство управления правильно дрессировочным станом содержащее измери тель вытяжки,-выполненный в виде соединенных с главным приводом стана и вспомогательным приводом тянущей стан ции датчиков импульсов,«соединенных посредством двух счетчиков с блоком хранения информации, задатчик вытяжки, блок сравнения, регулятор привода стана, содержащий соединенный с блоком сравнения блок зоны нечувствительности, подключенный к суммирующему блоку через дискретно-аналоговый преобразователь отклонения вытяжки и блок умножения, ко второму входу которого подключен датчик скорости главного привода стана. Суммирующий блок, кроме того, соединен с задат чиком вытяжки. Повышение точности поддержания: заданной величины вытяжки в этом устройстве достигается путем определения баН. зовой длины первым счетчиком и элемен та удлиненной полосы - вторым счетчиком 23. Однако известное устройство вносит запаздывание в контур регулирования обновления инвытяжки тем, что время формации в этом контуре определяется временем заполнения первого счетчика, что ухудшает статические и динамические показатели качества регулирования Кроме того, дестабилизирующим фактором процесса регулирования вытяжки полосы является изменение соотношения натяжения перед и после дрессировочной клети, возникающее вследствие того, что управление вытяжкой осуществляется выходной тянущей станцией, что также нарушает режим дрессировки полосы в дрессировочной клети. Цель изобретения - повышение точности регулирования вытяжки полосы и улучшение условий дрессировки ее в дрессировочной клети. Указанная цель достигается тем, ЦТС в устройстве управления реверсивным правильно-дрессировочным станом ус тановлены блок переключения импульсов блок генерирования дополнительных импульсов, блок суммирования опорных и дополнительных импульсов, реверсивный счетчик, а также блок стабилизаци соотношения натяжений полосы до и пос ле дрессировочной клети, причем первы вход блока переключения импульсов сое динен с первым датчиком импульсов, второй вход - со вторым датчиком импульсов, третий управляющий - с датчиком скорости валков дрессировочной клети, а первый выход - с первым входом блока генерирования дополнител ных импульсов и с первым входом блока суммирования опорных и дополнительных импульсов, второй выход соединен с входом вычитания реверсивного счетЧика, второй вход блока генерирования дополнительных импульсов соединен с выходом цифрового эадатмика вытяжки , а выход - с вторым входом блока суммирований опорных и дополнительных импульсов, выход которого соединен с входом сложения реверсивного счетчика, выход которого соединен с входом преобразователя код-аналог, выход : этого преобразователя соединен с первым входом блока стабилизации соотнош ния натяжений до и после дрессировочной клети, второй ( управляющий вход которого соединен с первым выходом ( второго задатчика натя}кения, третий ( управляющий 7 - с первым выходом первого задатчика натяжения, а первый выход соединен со входом схемы управB . 4 . ления первого ролика первой тянущей станции, второй - со входом схемы управления первого- ролика второй тянущей станции. На фиг.1 приведена блок-схема предлагаемого устройства. Устройство содержит правильную клеть 1 , первый датчик 2 импульсов, второй датчик 3 импульсов, блок Ц переключения импульсов, блок 5 генерирования дополнительных импульсов, блок 6 суммирования опорных и дополнительных импульсов, реверсивный счетчик 7, преобразователь 8 код-аналог, блок 9 стабилизации соотношения натяжений, цифровой задатчик 10 вытяжки, датчик 11 скорости валков дрессировочной клети, схему 12 управления первого ролика первой тянущей станции,схему 1 3 управления первого ролика второй тянущей станции,первый задатчик И натяжения, второй задатчик 15 натяжения,схему 16 управления второго ролика первой тянущей станции,схему 17 управления первой кюталки,схему 18 управления второго ролика второй тянущей станции, схему 19 управления второй моталки, причем первый вход блока k переключения импульсов соединен с первым датчикОм 2 импульсов, второй вход - со вторым датчиком 3 импульсов, третий (-управляющий) - с датчиком 11 скорости валкое дрессировочной клети, а первый выход - с первым входом блока 5 генерирования дополнительных импульсов и с первым входом блока 6 суммирования опорных и дополнительных импульсов, второй выход соединен со входом вычитания реверсивного счетМика 7. Второй вход блока 5 генерирования дополнительных импульсов соединен с выходом цифрового задатчика 10 вытяжки, а выход - со вторым входом блока о суммирования опорных и дополнительных импульсов, выход которого соединен со входом сложения реверсивного счетчика J. Выход этого счетчика соединен со входом преобразователя 8 код-аналог, выход которого соединен с первым входом блока 9 стабилизации соотношения натяжений до и после дрессировочной клети, второй (управляющий вход которого соединен с первым выходом второго задатчика 15 натяжения, третий (управляющий - с первым выходом первого задатчика k натяжения. Первый выход этого блока соединён со входом схемы 12 управления первого 5 ролика первой тянущей станции, второй - со входом схемы 13 управления первого ролика первой тянущей станции. Второй выход первого задатчика Т натяжения соединен со входом схеМы 16 управления второго ролика первой тянущей станции,третий - со входом схемы 17 управления первой моталки. Вто рой выход второго задатчика 15 натяж ния соединен со входом схемы 18 управления второго ролика второй тянущей станции, третий выход - со входом схемы 19 управления второй моталки. Вытяжка полосы в правильной клети 1 определяется LRblX- LBX ,AL- (1) где 1-р,Ц,д1 - измеренные в одном интервале времени соответственно дли на элемента удлиненной полосы на выходе клети, длина элемента неудлиненной полосы на входе клети (базовая) и величина удлинения- полосы на выходе клети. В предл а гаемом у ст рой ст ее (фи г.2 заданное значение Ьду)( Lgj + uL формируется блоком 5 генерирования д полнительных импульсов, блоком 6 сум мирования опорных и дополнительных импульсов (логическая схема, реализу ющая операцию ИЛИ) и цифровым задат чиком 10 вытяжки. Это формирование .. выполняется посредством измерения счетчиком блока 5 генерирования дополнительных импульсов элемента полосы 1-5У и формирования после этого дополнительного импульса, оценивающего величину &L. Причем уставка вел L задается цифровым задатчиком 10 вытяжки, а образование сумкм -ВЧ+i - осуществляется блоком 6 сум мирования опорных и дополнительных импульсов. Таким образом, в предлагаемом устройстве базовая длина пало сы Lgy- величина переменная, определяемая уставкой вытяжки, а удлинение полосы &L - величина постоянная, оце ниваемая одним импульсом датчика. Согласно (1) имеем L TУчитывая, что 1- t-V, то из(20 I t iVТак как Л1 - величина постоянная и о ределяется одним импульсом датчика. 8 его конструкцией , то (2) запит.е. шем скорость полосы , конструктивная постоянная время обновления информации интервал между двумя соседними дополнительными импульсами ). Стабилизация соотношения натяжения полосы до и после дрессировочной кле-ти обеспечивается блоком стабилизации соотношения натяжений (фиг.1}. Этот блок включает в себя два умножителя, . первым из которых устанавливается коэффициент передачи сигнала выхода преобразователя код-аналог в схему первого ролика первой тянущей станции, вторым устанавливается коэффициент передачи сигнала выхода этого преобразователя в схему первого ролика второй тянущей станции. Изменение указанных коэффициентов выполняется по управляющим входам сскэтветственно первого умножителя сигналом первого задатчика натяжения, второго - сигналом второго задатчика натяжения. Устройство работает следующим образом. Перед пуском стана, исходя из параметров обрабатываемой полосы, первым . задатчиком It натяжения и вторым за-. датчиком 15 натяжени в (регулируемые источники напряжения устанавливаются натяжения полосы до и после дрессировочной клети (до и после -определяются направлением перемещения пот лосы: для направления , указанного стрелкой (фиг.1) до справа, после - слева. для противоположного равления движения полосы слева. после - справа). Причем задатчиком 1 устанавливаются уставки в схеме 16 управления второго ролика первой тянущей станции и в схеме 17 управления первой моталки, а задатчиком 15 - в схеме 18 управления второго ролика второй тянущей станции и в схеме 19 управления второй моталки. Одновременно сигналами задатчиков k и 15 натяжения обеспечивается по управляющим входам настройка блока 9 стабилизации соотношения натяжений (установка коэффициентов передачи множителей блока 9 на соотношение натяжений, пропорциональное соотношению сигналов этих задатчиков.Этим достигается 7 независимость соотношения натяжений до и после дрессировочной клети в процессе регулирования вытяжки полосы в правильной клети первыми роликами первой и второй тянущих станций При пуске стана сигналом от датчика 11 скорости валков дрессировочной кл ти ( тахогенератор, полярность напряж ния выхода которого указана для движения полосы в направлении стрелки ) включится реле Р/ блока i переключения импульсов, вследствие чего импул сы от второго датчика 3 импульсов поступают на первый вход блока 5 генерирования дополнительных импульсов и на первый вход блока б суммирования опорных и дополнительных импульсов, а от первого датчика 2 импульсов поступают на вход вычитания реверсивного счетчика 7, т.е. импульсы от первого датчика 2 импульсов, изме ряющего удлиненную полосу, поступают на вход вычитания реверсивного счетчика, а импульсы второго датчика 3 импульсов, измеряющего неудлиненную полосу, поступают на первые входы блоков 5 и 6. При движении полосы в обратном направлении изменя ется полярность напряжения выхода датчика 11 скорости валкое дрессировочной клети, вследствие чего включится реле Р блока 4 переключения импульсов, и импульсы второго датчика 3 импульсов поступают на вход вычитания реверсивного счетчика -7 а импульсы первого датчика 2 импульсов поступают на первые входы блоков 5 и 6. Счетчик блока 5 генерирования дополнительных импульсов (фиг.2 выполняет пересчет поступающих на ег вход импульсов согласно информации, установленной цифровым задатчиком 10 вытяжки, т.е. каждый раз при накоплении этим счет1 1ком количества импу льсов, соответствующего базовой длине полосы выходе избранного цифровым задатчиком 10 вытяжки элемента, реализующего логическую опера цию И, возникает сигнал, который приводит к срабатыванию двух времяимпульсных элементов блока 5 генерирования дополнительных импульсов в результате чего формируется дополнительный импульс и счетчик сбрасывается в нуль. Дополнительные импуль сы поступают на второй вход блока 6 суммирования опорных и дополнительны импульсов, где выполняется приформир вание (фиг.2) дополнительных импульсое в паузы серии опорных импульсов. Сформированная серия из опорных и дополнительных импульсов поступает на вход сложения реверсивного счетчика и является заданием системы регулирования вытяжки. Обратной связью является серия импульсов поступающая от датчика импульсов, измеряющего удлиненную полосу, на вход вычитания реверсивного счетчика. Учитывая, что реверсивный счетчик является накопителем ошибки { несоответствие серии импульсов задания и обратной связи), в установившемся режиме ошибка отсутствует. Записанное в двоичном коде в реверсивном счетчике 7 число преобразуется код-аналоговым преобразователем 8, поступает через блок 9 стабилизации соотношения натяжений в схему 13 управления первого ролика второй тянущей станции. Предлагаемое устройство улучшает качество регулирования вытяжки полосы в статике и динамике, а также обеспечивает постоянство соотношения натяжений до и после дрессировочной клети, чем создает необходимые условия вытяжки и дрессировки полосы при обработке ее в стане, чем достигается повышение качества обрабатываемых полос. Формула изобретения Устройство управления реверсивным правильно-дрессировочным станом, содержащее правильную клеть, первый и второй датчики импульсов, связанные посредством качения с обрабатываемой полосой, датчик скорости, кин.рматически связанный с двигателем дрессировочной клети, схемы управления первыми и .вторыми роликами первой и второй тянущих станций схемы управления первой и второй моталками, цифровой задатчик вытяжки, преобразователь коданалог, переели задатчик натяжения полосы, соединенный со схемой управления второго ролика первой тянущей станции и со схемой управления первой моталки , второй задатчик натяжения полосы, соединенный со схемой управления второго ролика второй тянущей станции и со схемой управления второй моталки, отли чающееся тем, что, с целью повышения точности и качества регулирования вытяжки полосы, а также комплексного управления процессами вытяжки и дрессировки полосы, в нем дополнительно установлены блок переключения импульсов, блок генерирования дополнительных импульсов, блок суммирования опорных и дополнительных импульсоВ| реверсивный счетмик и блок стабилизации соотношения натяжений причем первый вход блока переключения импульсов соединен с первым датчиком импульсов, второй вход - со .вторым датчиком импульсов, третий (управляющий) - с датчиком- скорости валков дрессировочной клети, а первый выход - с первым входом блока генерирования дополнительных импульсов и с первым входом блока суммирования опорных и дополнительных импуль-; сов , второй выход соединен с входом юячитания реверсивного счетчика, второй вход блока генерирования дополнительных импульсов соединен с выходом цифрового задатчика вытяжки, а выход - со вторым входом блок9 суммирования опорных и дополнительных
импульсов, выход которого соединён со входом сложения реверсивного счетчика, выход последнего соединен со входом преобразователя код-аналог,
выход которого соединен с первым входом блока стабилизации соотношения натяжения, второй Суправляющий) вход которого соединен с первым выходом второго задатчика натяжения, третий
(,управляющий - с первым выходом первого задатчика натяжения, а первый выход соединен со входом схемы упрааг ления первого ролика первой тянущей станции, второй - со входом схемы управления первого ролика второй тянущей станции.
Источники информации, принятые во внимание при экспертизе
I
1.Авторское свидетельство СССР 338277, кл. В 21 В 37/00, 1970.
2.Авторское свидетельство СССР ff 391880, кл. В 21 В 37/00, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления реверсивным правильно-растяжным станом | 1982 |
|
SU1085654A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРАВИЛЬНО-ДРЕССИРОВОЧНЫМ | 1973 |
|
SU391880A1 |
| Устройство для регулирования натяжения полосы | 1981 |
|
SU1009551A1 |
| УНИВЕРСАЛЬНЫЙ ЛИТЕЙНО-ПРОКАТНЫЙ СТАН | 2000 |
|
RU2217247C2 |
| Устройство управления электроприводом моталки на стане горячей прокатки | 1988 |
|
SU1607988A1 |
| Способ определения момента подачи управляющего сигнала на механизм,работающий согласованно с перемещением материала | 1983 |
|
SU1148728A1 |
| РЕГУЛЯТОР НАТЯЖЕНИЯ МОТАЛКИ РЕВЕРСИВНОГО СТАНА | 1970 |
|
SU261523A1 |
| Устройство управления приводом секции отводящего рольганга | 1982 |
|
SU1045970A1 |
| Устройство для автоматического замедления и точного останова реверсивного стана холодной прокатки | 1976 |
|
SU713629A1 |
| Устройство для автоматического сопровождения сварных швов и останова реверсивного прокатного стана | 1977 |
|
SU743739A1 |