Изобретение относится к машиностроению, в частности к узлам соединения подвижных элементов гидросистем машины.
Ifenbro изобретения является повышение надежности гидросистемы и снижение расхода материала гибкого трубопровода за счет исключения изгиба трубопровода с недопустимыми радиусом кривизны и определение коор динат узлов его закрепления, что обепечивает использование трубопровода оптимальной длины.
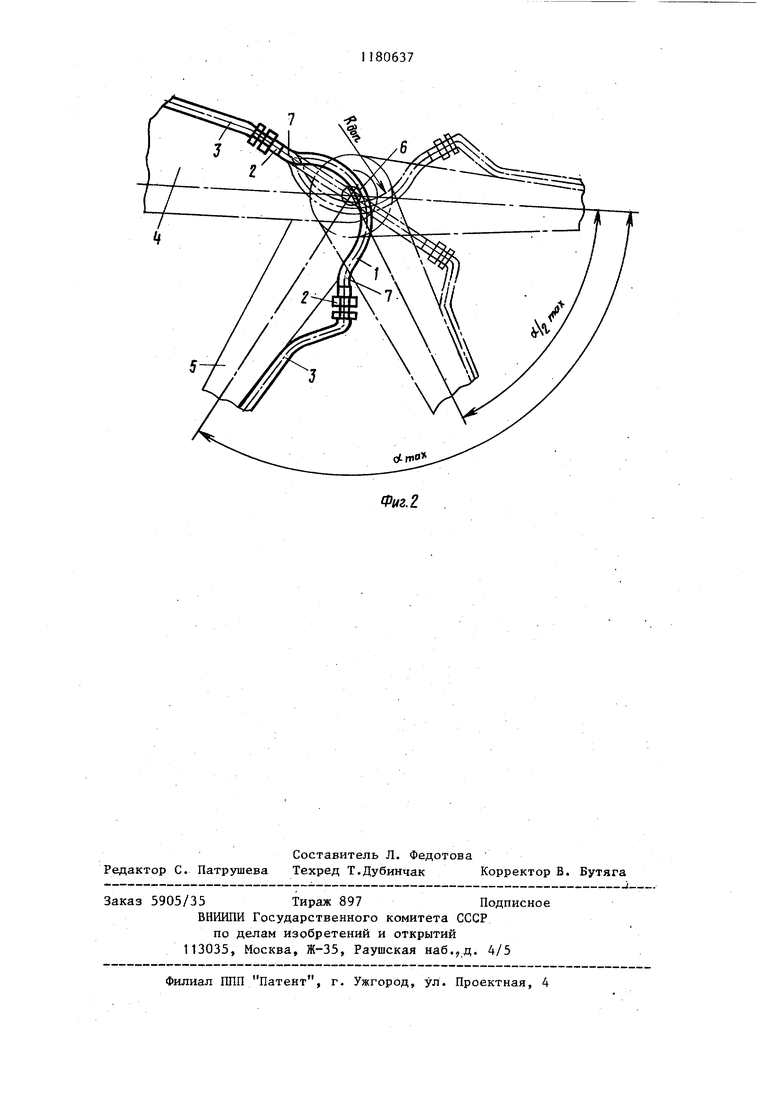
На фиг. 1 и 2 представлено соеди|1ёние в крайних и в среднем положеиях соответственно.
Устройство содержит гибкий трубопровод 1, узлы его крепления 2 к элементам 3 гидросистемы (в данном случае это -трубопроводы) , расположеннь1м на качающихся частях машины, например стреле 4 и рукоятки 5, вокруг их общей оси 6. Гибкий трубопровод 1 В местах его крепления имеет прямолинейные участки 7, продольные оси которых ориентированы на пересечение с осью качания..
Соединение производится следующим образом.
Рукоять 5 выводится в среднее положение, т.е. отводится на угол .
Определяют координаты узлов крепления гибкого трубопровода по формуле
V RA /лмнс ,
3
где 1 - расстояние от первого узла
крепления до оси качания; Ij - расстояние от второго узла
крепления до оси качания; 1 - длина прямолинейного участка гибкого трубопровода в месте крепления; Кдоп допустимый радиус изгиба
гибкого трубопровода; мйкс максимальный у г oj-. качания частей машины.
При этом выбирают , 5з выбирают с учетом известных рекомендаций: Ij 2d, где d - внутренний диаметр гибкого трубопровода.
Длину гибкого трубопровода определяют следующим образом:
L 7, , + .,+ 21,
где 1 - длина заделки гибкого трубопровода.
Гибкий трубопровод длиной L в распрямленном виде располагается так, чтобы он проходил через ось 6 качания и концы его, расположенные на равном расстоянии от оси качания 6, т.е. на длине L/2, определяют координаты узлов крепления 2 к трубопрсзводам 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Юстировочное устройство | 1989 |
|
SU1732316A1 |
| ФРЕЗЕРНЫЙ СТАНОК С ЧПУ | 2013 |
|
RU2572111C2 |
| Машина для сферодвижной штамповки | 1988 |
|
SU1650308A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПО АНАЛИТИЧЕСКОЙ ИНФОРМАЦИИ КОМПЕНСАТОРНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2126305C1 |
| СПОСОБ НАСТРОЙКИ СТРУННОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2526200C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ЗНАКОПЕРЕМЕННОЙ КРИВИЗНЫ | 2002 |
|
RU2229355C1 |
| Способ эталонирования трубопроводов и устройство для его осуществления | 1989 |
|
SU1756665A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МАГИСТРАЛЬНОЙ ТРУБЫ ПО АНАЛИТИЧЕСКОЙ ИНФОРМАЦИИ | 1997 |
|
RU2126760C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОЧИСТКИ И ОБРАБОТКИ ПОВЕРХНОСТЕЙ "РОП" | 2001 |
|
RU2236313C2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ТРУБЫ ПРИ МНОГОКОЛЕННОЙ ГИБКЕ | 1991 |
|
RU2025167C1 |

СПОСОБ СОЕДИНЕНИЯ ГИБКИМ .ТРУБОПРОВОДОМ ЭЛЕМЕНТОВ ГИДРОСИСТЕМЫ, расположенных на двух частях машины, качающихся относительно общей оси, заключающийся в том, что гибкий трубопровод с прямолинейными участками вблизи мест крепления посредством узлов крепления фиксируют на элементах гидросистемы, отличающийс я тем, что, с целью повьш1ения на:дежности гидросистемы и снижения расхода материала трубопровода, одну из Качающихся частей поворачивают относительно другой на угол, равный половине максимального угла качания частей машины, гибкий трубопровод длиной L определяемой по формуле и R оп L 2а + 2Ь, 180 где Кдрп - допустимый радиус изгиба гибкого трубопровода; ч максимальный угол качания частей машины; а - длина прямолинейного участ9 ка вблизи мест крепления; b - длина заделки гибкого трубопровода, в распрямленном виде размещают так, чтобы его середина проходила через ось качания, и размещенный указанным образом гибкий трубопровод в местах расположения его концов соединяют с 00 элементами гидросистемы. о Од СО 
| Васильченко В.А | |||
| и Веркович Ф.М | |||
| Гидравлический привод строительных и дорожных машин | |||
| М.: Стройиздат, 1978, с | |||
| Приспособление, увеличивающее число оборотов движущихся колес паровоза | 1919 |
|
SU146A1 |
