Изобретение относится к аналогово вычислительной технике и может найти применение в тренажерах для под. готовки водителей гусеничных машин. Цель изобретения - расширение функциональных возможностей за счет моделирования движения гусеничной машины на плаву. На чертеже представлена функциональная схема устройства. Устройство содержит первый интегр сумматор 1, сумматор 2, первый усилитель 3, второй интегросумматор 4, первый 5 и второй 6 квадраторы, огра ничитель 7 напряжения, инвертор 8, коммутатор 9, третий интегросумматор 10, мостовой выпрямитель 11, второй, третий квадратор 12, первый инвертор 13, датчик 14 вида грунта, второй усилитель 15, ограничительные резисторы 16. Движение машины на плаву описываю ся системой уравнений V iil I- (p p - p 1 Вв CR dt m Г P k V K 3 V , развиваемая ниж - сила тяги. ними ветвями гусениц; -сила тяги, развиваемая верхними ветвями гусениц; -сила сопротивления движению машины на плаву. Устройство работает следующим образом. 1. Режим движения по суше. В зтомслучае датчик 14 вида грун та включен в положение, соответствую щее какому-либо грунту, например луг песок, пахота и т.д., в этом случае на выходах датчика 14 имеются следую щие напряжения: первый выход - напря жение, пропорциональное силе сопротивления грунта,второй, выход - напр жение, пропорциональное силе сцепления гусениц с грунтом, третий выход сигнал логического нуля, который с помощью коммутатора 9 отключает третий, четвертый и пятый входы интегросумматора 10. Датчик вида грунта может представлять собой либо программное устройство, либо обычный пер ключатель. В данном режиме устройство работа ет следующим образом. Интегросумматор 1 решает уравнение: г ел dWBK М пр dt Гвк где 1 - момент инерции вращающихся масс, приложенный к ведущему колесу; крутящий момент, приложенный к ведущему колесу; сила тяги; вх радиус ведущего колеса; Напряжение поступает на вход инте- росумматорач1, на выходе которого формируется напряжение , пропорциональное угловой скорости ведущего колеса, на другой вход интегросумматора 1 поступает напряжение Up с выхода ограничителя 7. Напряжение Up формируется с помощью интегросумматора 4 и ограничителя 7. Интегросумматор 4 решает уравнениеР - ( dt г . г - - вк вк где е - податливость рабочей ветви гусениц; V - линейная скорость машины. На первый вход интегросумматора 4 подается напряжение U g с выхода интегросумматора 1, на другой вход Uy. с выхода интегросумматора 10. Учет коэффициента 1 осуществляется входным резистором (не показан) интегросумматора 4, в результате на выходе последнего формируется напряжение, пропорциональное Up . . С помощью ограничителя 7 моделируется процесс взаимодействия гусениц с грунтом. Если напряжение Up Upci, - напряжения, пропорциональ- ного силе сцепления гусениц с грунтом (последнее подается на управляющие входы и определяет уровень ограничения) , то напряжение Up без изменений по амплитуде проходит через ограничитель 7. Если же UpJUpci. напряжение Up ограничивается ограничителем 7 до-напряжения, поданного на управляющие входы, т.е. до величины Uo P С выхода ограничителя 7 напряжение Up поступает на вход интегросумматора 10, в результате чего на выходе последенего формируется напряжение Uy , пропорциональное линейной скорости машины. На второй вход интегросумматора 10 через мостовой выпрямитель 11 подается, напряжение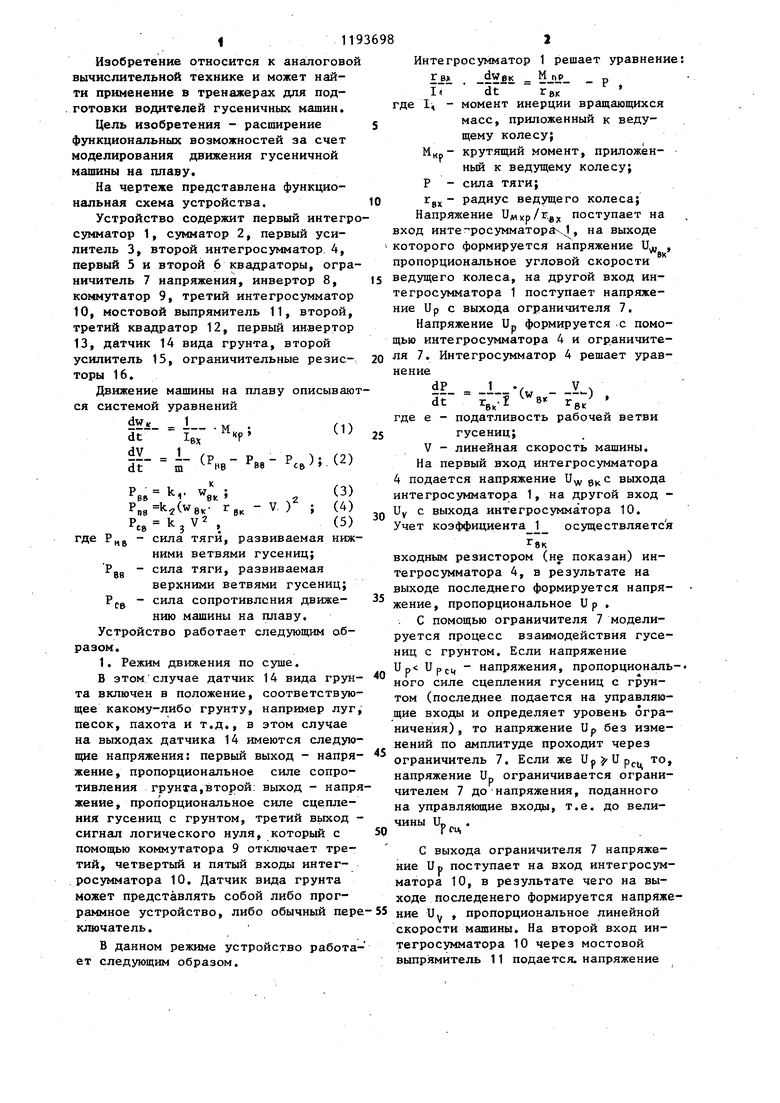
УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИКИ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МЛШЙШ, содержащее сумматор, инверторы, датчик вида грунта, интегросумматоры ограничитель напряжения, причем выход первого интегросумматора соединен с первым входом второго иитегросумматора, второй вход которого подключен к выходу третьего интегросзмматора, выход ограничителя напряженяя соединен с первыми входами первого я третьего интегросумматоров, второй вход и выход третьего интегросумматора подключены кодной паре вершин мостового выпрямителя, другая пара вершин которого соединена через соответствующие ограничительные резисторы с входом и выходом первого, инвертора выход второго инвертора подключен к первому управляющему входу ограничителя напряжения, второй управляющий вход которого объединен с входом второго инвертора, второй вход первого интегросумматора подключен к входу, задания крутящего момента устройства, и первый усилитель, о т л и чающееся тем, что, с целью расширения функциональных возможностей за счет моделирования движения гусеничной машины на плаву, оно содержит квадраторы, коммутатор и второй усилитель, при этом выходы первого и второго квадраторов, а также выход второго усилителя подключены к Информационным входам коммутатора, шгходы которого соединены с третьим, четвертым и пяТ1Д4 входами третьего иытегросумнатора, выход которого КЛ подключен к первому входу сумматора и через третий квадратор соединен с входом второго усилителя, выхода датчика вида грунта подключены соответственно к управлякицему входу коммутатора и входам первого и второго инверторов, выход первого интегросумматора соеданен с вторым входом сумматора и входом первого со усилителя, вшходы сумматора и перDO Од вого усилителя подключены к входам первого и второго квадраторов соотi;O ветственно, выход второго интегро- 30 cyfoiaTopa соединен с входом ограничителя напряжения.
| Способ работы биагентной эжекторной холодильной машины | 1980 |
|
SU907360A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU972530A2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
