2. Устройство по п.1, о т л и ч а ю щ е е с я тем, что датчзжи положения рулевого механизма и положения фар содержат цепь из параллель но соединенных излучающих элементов и фоторезисторы, соединенные по мостовой схеме, одна диагональ которой 12 подключена к источнику питания, а другая является выходом датчика положения фар, и подвижную светоотражающую пластинку для перекрытия светового потока, механически связанную соответственно с рулевым механизмом и фарами.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ФАР ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2111136C1 |
| Устройство для контроля положения передвижных механизмов | 1986 |
|
SU1418783A1 |
| Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе | 1979 |
|
SU872324A1 |
| Устройство контроля расхода воздуха для вентиляции тяговых электродвигателей транспортного средства | 1984 |
|
SU1194721A1 |
| Устройство для определения местоположения края детали на швейной машине | 1987 |
|
SU1497308A1 |
| АДАПТИВНАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2239576C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ И РАСХОДА ЖИДКОСТИ | 1992 |
|
RU2043604C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ СВЕТОВОГО ПУЧКА ФАР МОТОТРАНСПОРТНОГО СРЕДСТВА В ПРОЦЕССЕ ВЫПОЛНЕНИЯ ПОВОРОТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2304250C2 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| Имитатор света фар движущейся по мостовой переправе техники | 2024 |
|
RU2835067C1 |
1. УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ФАР ТРАНСПОРТНОГО СРЕДСТВА, содержащее привод поворота фар и датчшс положения рулевого механизма, отличающееся тем, что, с целью повышения надежности, оно снабжено датчиком положения фар и блоком сравнения, входы которого связаны соответственно с выходами . датчика положения рулевого механизма и датчика положения фар, а выход подключен к входу привода поворота фар. (Л с: :Х) 
1
Изобретение относится к устройствам, предназначенным для автоматического управления положением светового потока фар транспортного средства в зависимости от положения рулевого колеса.
Цель изобретения - повьшение надежности работы устройства.
На фиг. 1 представлена-структ рная блок-схема предложенного устройства; на фиг, 2 - прршципиальная схема датч1жов положения рулевого механизма и положения фар} на фиг. 3 пример конструктивного размещения основных элементов устройства; на фиг. 4 и 5 -- примеры конструктивного выполнения поворотного механизма фар
Устройство содержит датчг-ж 1 положения рулевого механизма 2 н датчик 3 положения фар 4, усилители 5, 6 постоянного тока, через которые датчики 1 и 3 подключены к блоку 7 сравнения, двигатель 8, поворотный механизм 9 и светоотражающие плас: тинки 10.
Датчики 1 и 3 (фиг.2) содержат фоторезисторы 11, резисторы 12, излучающие элементы 13. Элементы датчика неподвижно закреплены на корпусе автомобиля в .пределах сектора 14. Подвижная часть мостовых датчиков выполнена в виде сектора со светоотражающей пластинкой 10, которая при повороте рулевого колеса для первого датчика или при повороте фар для второго датчика перекрывает пары излу.чающий элемент - фоторезистор мостовых датчиков.
Все фоторезисторы 11 и излучающие элементы 13 установлены в торце рулевой колонки 15 вдоль его периметра образом, чтобы излучаемьй свет непосредственно не мог по.пасть на фоторезисторы, облучение которых может происходить только путем отражения излучаемого света от светоотралсающей пластинки 10, которая будет проходить над системой излучатель - фоторезистор при повороте рулевого механизма 2.
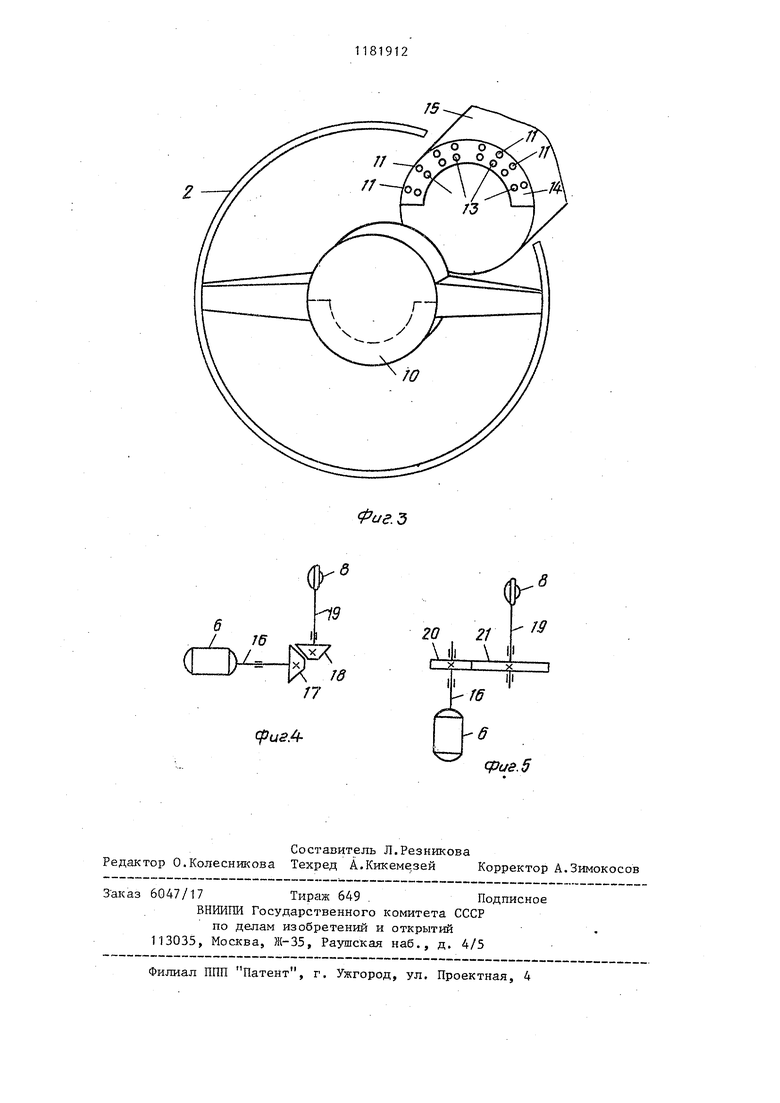
Реализация поворотного механизма 9 вращения фар может быть осуществлена по фиг. 4, где вал 16 двигателя 8 через кон1таеские шестерни 17 и 18 соединен с валом 19, либо по фиг. 5: вал 16 через обычные шестерни 20 и 21 соединен с валом 19. Между собой фары могут быть соединены, например, цепной или зубчатой передачей, ес.пи они расположены в непосредственной близости друг от друга, либо каждая из них может иметь поворотньы механизм в случае их значительного территориального разноса. В последнем случае обмотки двигателей включаются параллельно.
Устройство работает следующим образом.
При повороте рулевого колеса светоотражающая пластинка 10 датчшса 1 перекрывает по мере поворота одну за другой пары фоторезистор - излзчатель, что приводит к облучению фоторезисторов и соответственно к уменьшению их сопротивленш. Баланс моста нарушается, и на входе усилителя 6 появляется напряжение рассогласования, которое поступает на неинвертирующий вход блока 7 сравнения и далее на обмотки двигателя 8. Последний начинает вращаться и с помощью поворотного механизма 9 осудествляет поворот фар 4 и жестко с ними связанной светоотражающей пластинки 10 датчика 3. Это приводит
;к нарушению баланса последнего. Сигнал рассогласования поступает на
311
усилитель 5 и на инвертирующий вход блока 7 сравнения. Чем больше угол поворота фар, тем сильнее разбаланс моста, тем больше величина напряжения, подаваемого на вход блока 7 сравнения. Это будет происходить до тех пор, пока напряжения на входах блока 7 не сравняются по величине. На его выходе напряжение станет равным нулю, что приведет к остановке двигателя и прекращению поворота фар. Если мостовые датчики идентичны, то угол поворота фар соответствует углу поворота рулевого колеса.
При возвращении рулевого механизма в исходное положение мостовой датчик 1 будет сбалансирован. На его выходе, на входах усилителя 6 и Неинвертрфующем входе блока 7 сравнения напряжения будут равны нулю.
/{усилителю
I
19124
Однако на входе блока 7 сравнения попрежнему будет присутствовать усиленньй сигнал рассогласования датчика 3, так как фары находятся в повернутом состоянии. Это приведет к появленшо напряжения на выходе блока 7. Только теперь это напряжение будет обратной полярности, что заставит вращаться двигатель 8, поворотньй
0 механизм 9 и фары 4 в обратную сторонз до установления баланса мостового датчрша 3, после чего напряжение на входе блока 7 также станет равным нулю.
f5
При повороте рзшевого механизма в другую сторону весь процесс повторится, только напряжения в этом случае будут противоположную полярность, что приведет к вращению фар в другую сторону.
° и питания
фиг.1
17
.
Фиг.ъ
3
Г
20 21
k , Li
{iliiMi Ими lai |||и -y-.JL
16
(pus. 5
| Патент США № 4340928, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| / «iFfy. | |||
| -ПЗ | |||
| -.: | |||
