78
Изобретение относится к средствам ориентирования деталей и может быть использовано на швейных машинах.
Цель изобретения - повьшгение инфор мативности.
На фиг,1 приведена структурная схема перемещения детали на швейной машине; на фиг.2 - световоды, расположенные в зоне контроля за краем де- тали; на фиг.З - расположение в пространстве торцов световодов и края детали; на фиг.4 - варианты расположения детгши в зоне контроля; на фиг.З - вьзделенные площади освещенности контролируемой детали; на фиг.6 - структурная схема включения. фоторезисторов; на фиг.7, 8, 9 - структурная схема блока обработки информации.
. Устройство содержит приводные шаговые двигатели 1 и 2, валы которых связаны с винтами 3 и 4 соответственно. Подвижная каретка 5, расположенная с возможностью перемещения на направляющих 6, приводитсй в движение по одной из координат с помощью гайки 7, связанной с винтом 4. Каретка 5 имеет гайку 8, связанную с винтом 3, направляющие 9, на которьпс с возможностью перемещения установлена Кассета 10 с деталью 11, причем кассета 10 может быть приведена в дви- жение По второй координате с помощью гайки 8, связанной с винтом 3. В не- посредстве&ной близости к детали находится рабочий торец световода 12, который имеет отверстие для прохода иглы.
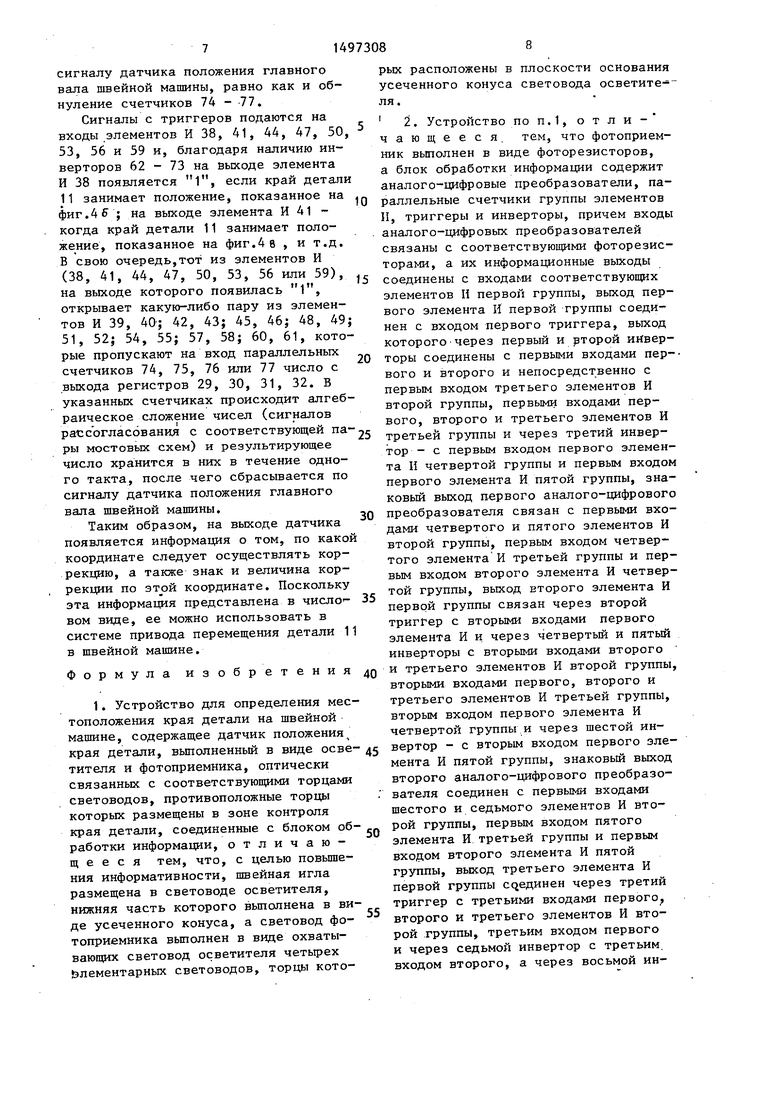
Таким образом, программное перемещение полуфабриката при обработке осуществляется по двум взаимно-перпендикулярным координатам. Приемная ветвь световода разделена на рабочем торце на секции 16, имеюш;ие на рабочем торце плоскую форму. Рабочий торец световода, т.е.торец, расположенный в оптической близости от верхней детали, составляет осветительную ветвь 17. Осветительная ветвь 17 на рабочем торце имеет форму усеченного конуса и охватывает отверстие 18 для прохода иглы. Световоды 12 - 16 собраны соответственно в жгуты 21, 19, 20, 22 и 23, напротив тррцов которых расположены фоторезисторы 24 - 27 и осветитель 28, причем приемная ветвь на торце световода охватывает осве
0
5
0
0
5
5
0
5
тительную ветвь, что повьш1ает относительную чувствительность устройства.
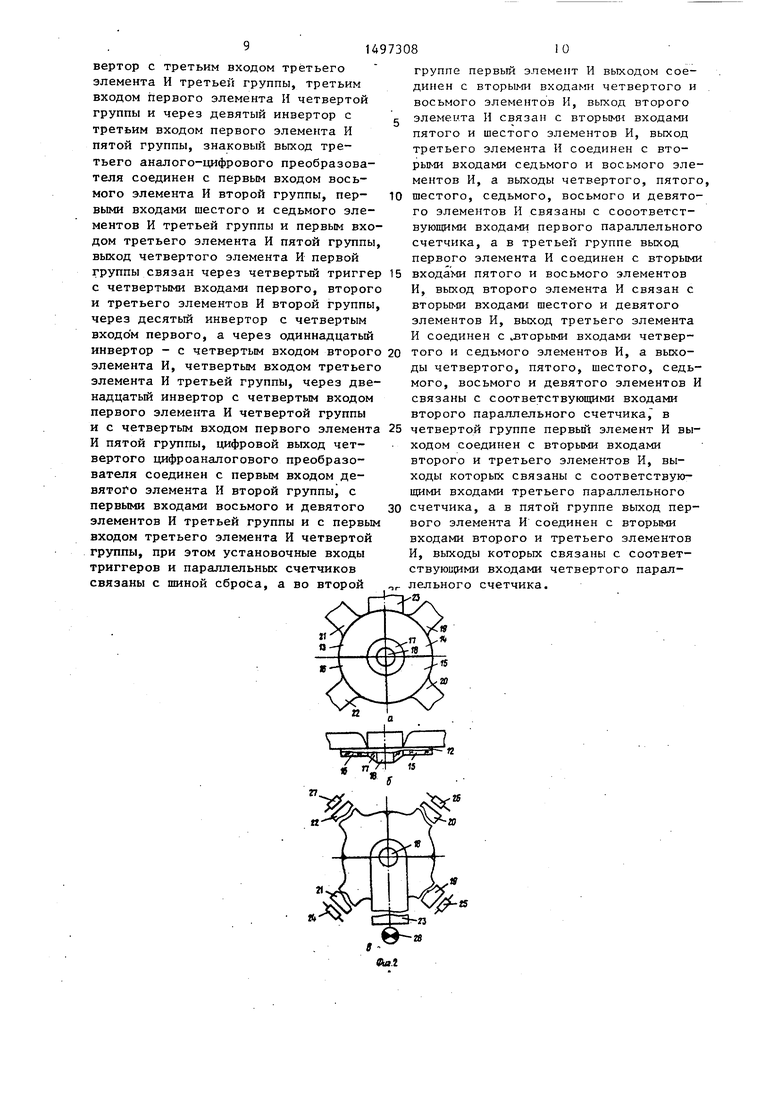
На фиг.4 показаны все возможные варианты расположения края детали. 11 под рабочим торцом световода при выполнении замкнутой строчки. В устройстве применяется попарное использование секций приемной ветви (на фиг.4 они заштрихованы), поскольку, как следует из фиг.З, только такое выполнение позволяет получить равные площади освещенной части приемной ветви при равных расстояниях края верхней детали 11 от центра приемного торца (т.е.от иглы) для всех показанных на фиг.4 BapHaHtoB взаимного расположения приемного торца и края верхней детали 11.
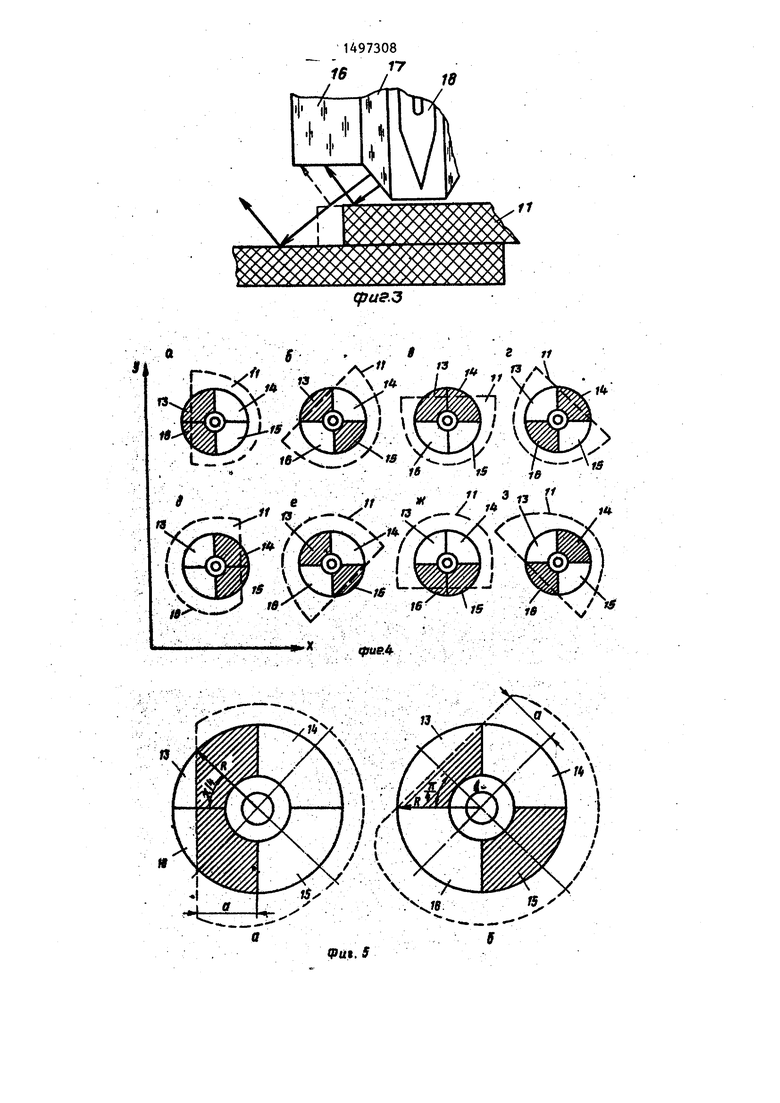
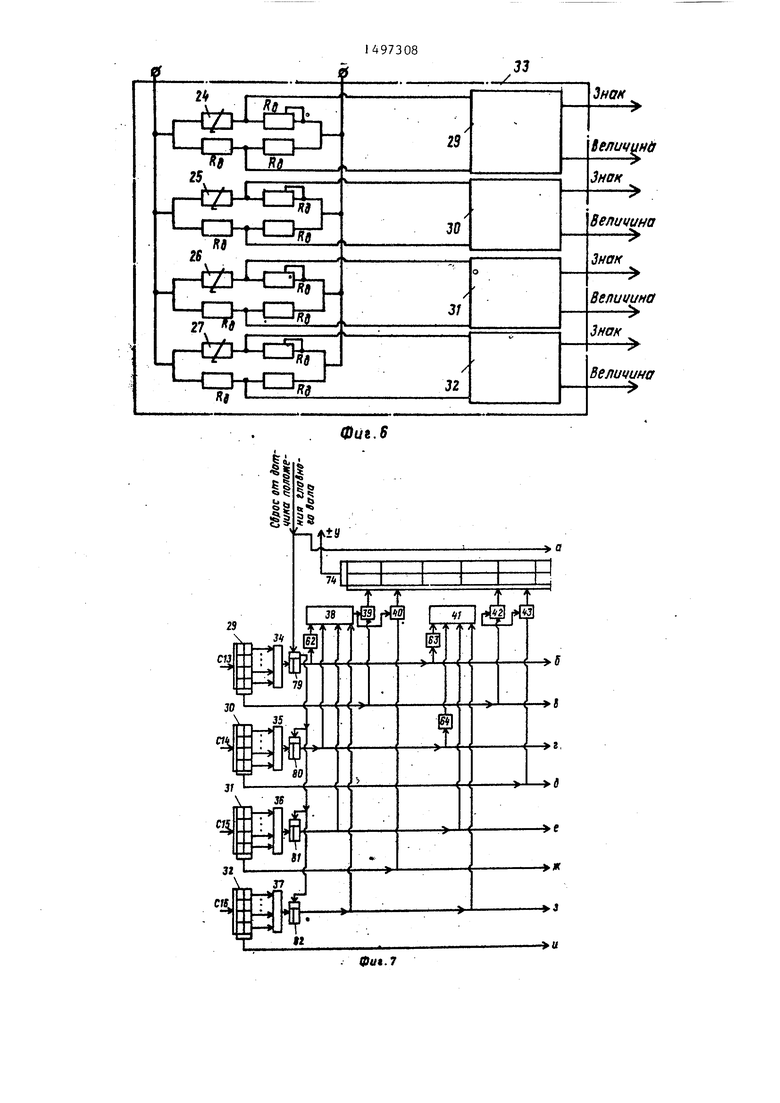
Фоторезисторы включены в мостовые схемы, причем выходы мостовых схем подключены к аналогово-цифровым преобразователям 29, 30, 31, 32. Таким образом, на выходе преобразователя 33 имеем.в цифровом виде информацию о .величине и знаке сигнала рассогласо- ,вания на мостовых схемах, т.е. о смещении края детали 11 из заданного положения (заданное положение иллюстрируется на фиг.З). При заданном положении, показанном на фиг.З а (когда край детали 11 расположен параллельно линии, разделяющей секции приемной ветви), рабочими являются секции 13 и 16, причем на мостовых схемах, содержащих фоторезисторы 24 и 27, рассогласование равно нулю. При смещении края детали из заданного положения влево или вправо возникает положительное или отрицательное рассогласование на этих схемах, которое регистрируется на аналого-цифровых преобразователях 29 и 32.
При заданном положении, показанном на фиг.З б (когда край детали 11 расположен под углом 43° к линии, разделяющей секции) , рабочими становятся секции 13 И 13. При зтом на мостовой схеме, содержащей фоторезистор 26 (соответствующий секции 13), появится положительное рассогласование, а на мостовой схеме, содержащей фоторезистор 24 (соответствующий секции 13), появится отрицательное рассогласова-« ние. Абсолютный величины этих рассогласований равны между собой, так как для нулевого рассогласования на этих мостовых схемах необходимо, чтобы в секции 13 бьша неперекрыта только
неперекрытого (незаштрихополовина
ванного) сегмента, а в секции 15 бьша неперекрыта площадь, также равная половине этого сегмента (это следует из сравнения фиг.5 а и фиг.5 б).
Таким образом, алгебраическая, сумма рассогласований на этих мостовых схемах равна нулю (хотя сами рассогошат
14973086
пр Ъвести по какой-либо одной координате. Разделим все показанные положения на группы; 1 - фиг.Дсг П - фиг.4
5, в , г ; Ш - фиг.4 } ; У - фиг.4 е , ж, з« Очевидйо, что для первой и третьей групп допустима коррекция по координате х а для второй и четвертой групп - по координате Y. В то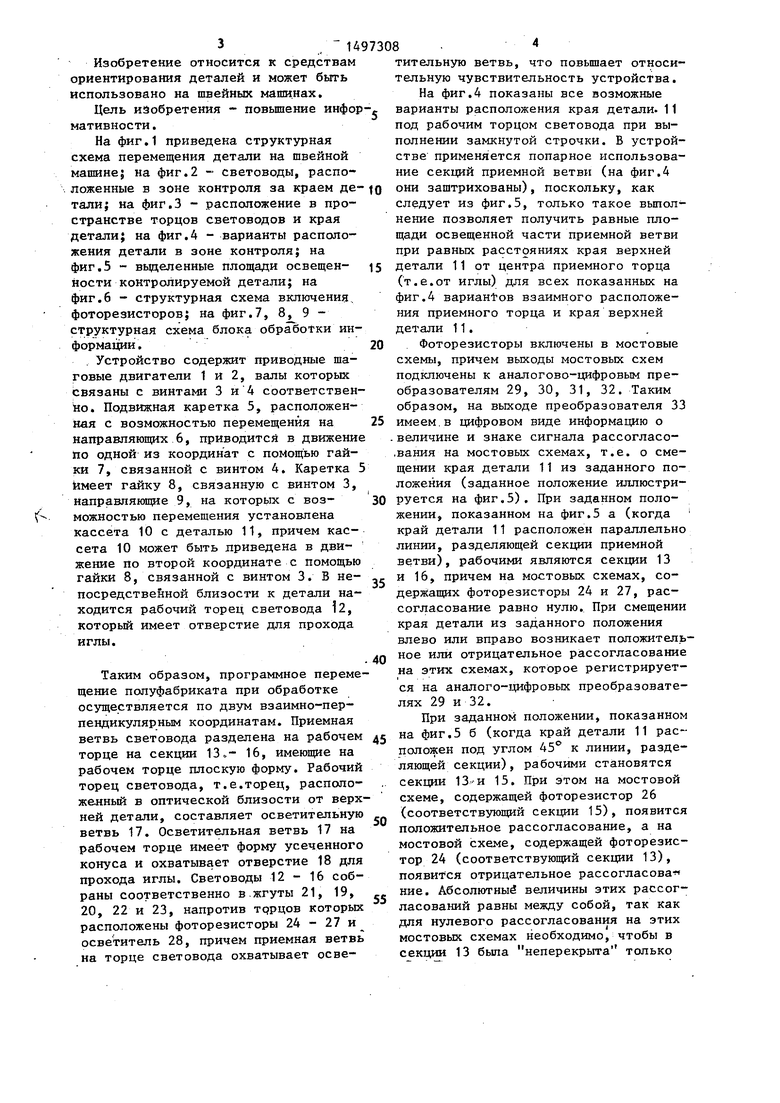

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления швейной машиной | 1987 |
|
SU1527343A1 |
| Устройство для обработки деталей по заданному контуру на швейной машине | 1978 |
|
SU745996A1 |
| Система управления однопрограммным швейным полуавтоматом | 1987 |
|
SU1557218A1 |
| Устройство для автоматического поворота обрабатываемых деталей относительно иглы швейной машины | 1981 |
|
SU985172A1 |
| Устройство для управления швейной машиной | 1984 |
|
SU1201374A1 |
| Устройство для считывания графической информации | 1981 |
|
SU964675A1 |
| Устройство для автоматического поворота детали относительно иглы швейной машины | 1977 |
|
SU687152A1 |
| Швейный тренажер | 1980 |
|
SU879624A1 |
| Цифровая следящая система | 1978 |
|
SU744439A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020416C1 |
Изобретение относится к средствам ориентирования деталей и может быть использовано на швейных машинах. Цель изобретения - повышение информативности. Устройство содержит приводные шаговые двигатели 1 и 2, кинематически связанные с кассетой 10, на которой крепится деталь 11, осветитель, через световод 12 оптически связанный с деталью 11. Внутри световода 12 имеется отверстие для размещения в нем швейной иглы. Световод 12 охвачен световодами, оптически связанными с фоторезисторами. Сигналы, полученные от фоторезисторов, поступают через соответствующие аналого-цифровые преобразователи в блок обработки информации, откуда может быть использован потребителем. 1 з.п.ф-лы, 9 ил.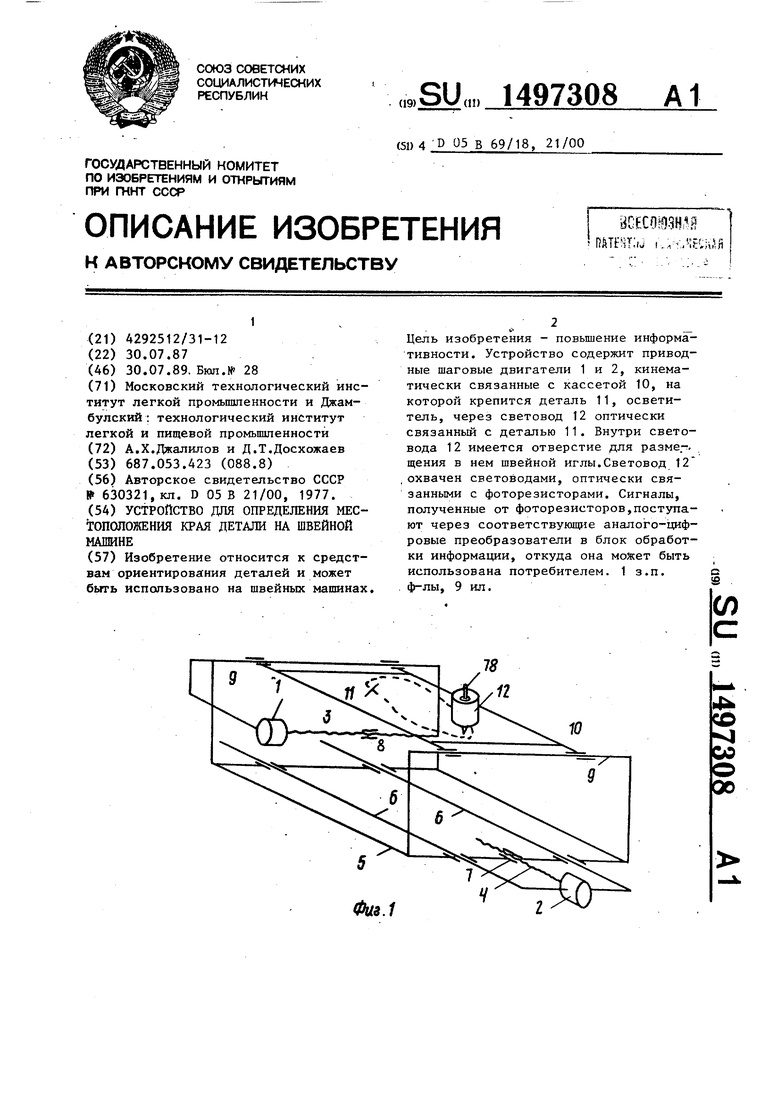
ласования регистрируются аналого-циф- ю же время, хотя указанные пары групп
ровыми преобразователями 29 и 31), что и используется в дальнейшем. Очевидно, что при смещении края детали I 11 из заданного положения приращение
и допускают коррекцию по одной и той же координате, они требуют разного по знаку корректирующего перемещения при одном и том же сигнале
(положительное или отрицательное) бу- 15 Рэссагласования на соответствующих дет получать только мостовая схема, соответствующая секции 13 (секция 15 будет оставаться полностью перекрытой) . Однако, общее рассогласование
с мостовых схем двух секций будет оп- 20 тью перекрытых ределяться путем алгебраического сложения чисел на выходах аналого-цифровых преобразователей 29 и 31.
Для остальных положений края детамостовых схемах. Для идентификации каждой из указанных групп необходимо вьщ ел ить присущие им сочетания полностью перекрытых и не полноссекций: например,
положению, показанному нафиг.4«, соответствует сочетание -секции 14 и 15 перекрыты полностью, а секции 13 и 16 перекрыты не полностью; поли, показанных на фиг.4, происходит аналогичная картина.
Переключение пар секций, в зависим мости от положения края детали 11, а также считывание суммарного сигнала рассогласования с соответствующей пары секций осуществляется блоком обработки информации.
На фиг.7 показаны не полностью аналого-цифровые преобразователи 29, 30, 31 и 32 и их выходные регистры. Помимо основного выхода каждый из этих регистров имеет дополнительный знаковый выход на элементы И (соот- ветСтвенйо 34, 35, 36 и 37), которые дают на выходе 1 только в том случае, когда в регистре записаны числа, соответствующие сигналу рассогласования на мостовых схемах при перекрытиях соответствующих секций от 90 до
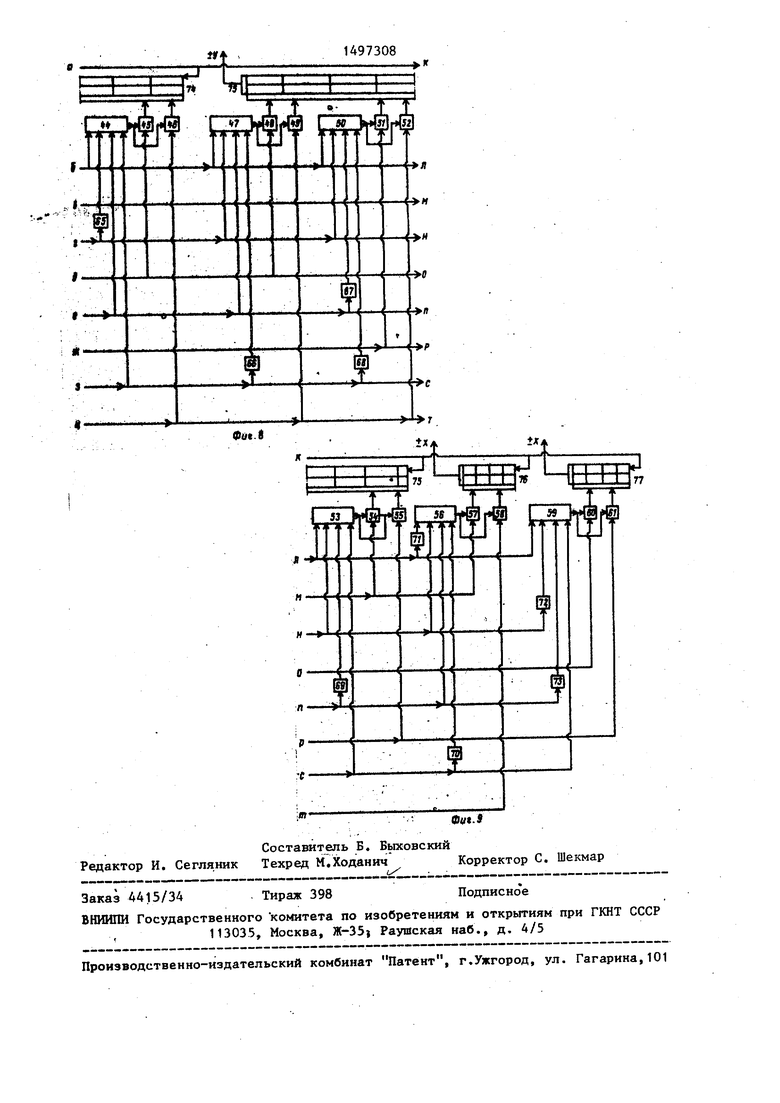
Кроме того,блок обработки информации содержит элементы И 38-61 инверторы 62-73 и параллельные счетчики
74-77.
Ла фиг.З показана швейная , размещенная в световоде 12. Выходы элементов И 34 - 37 подкп ючены ко входам триггеров 79 - 82, установсзч- ный вход которых соединен с датчиком положения главного вала швейной машины (не показан).
Из анализа фиг.4 следует, что во всех показанных положениях края детали, коррекцию ее положения можно
и допускают коррекцию по одной и той же координате, они требуют разного по знаку корректирующего перемещения при одном и том же сигнале
Рэссагласования на соответствующих
тью перекрытых
мостовых схемах. Для идентификации каждой из указанных групп необходимо вьщ ел ить присущие им сочетания полностью перекрытых и не полноссекций: например,
положению, показанному нафиг.4«, соответствует сочетание -секции 14 и 15 перекрыты полностью, а секции 13 и 16 перекрыты не полностью;
5 ложению, показанному на фиг.4
секции 14, 15 и 16 перекрыты полностью, а секция 13 - не полностью. Полностью перекрытая секция - это перекрытая на 90% и более, поскольку из-за ошибки положения края, в поло0
5
0
5
0
5
женин, показанном на фиг.4 5, например, могут быть не на 100% перекры- . ты секции 14 и 16.
Таким образом, функции блока обработки информации заключаются в идентификации группы положения края детали 11, вьщелении соответствующей этой группе пары секций (заштрихован- ньк на фиг.4), определению суммарного сигнала рассогласования на мостовых схемах этих секций.
Вьщеление группы осуществляется элементами И 34, 35, 36 и 37, на ко торые выведены дополнительные выходы с регистров 29, 30, 31 и 32.1 на выходе указанных элементов И появляются только в том случае, когда на регистре записаны числа, соответст. вующие сигналу рассогласования при перекрытии соответствующих секций от 90 до 100% (по площади). Если на .выходе какого-либо элемента И из указанных появляется 1, появляется l и на выходе соответствующего триггера 79 - 82. Перевод триггеров
в. нулевое положение осуществляется при входе иглы в материал заготовки, т.е. после окончания перемещения заготовки на очередной шаг стежка, по
сигналу датчика положения главного вала швейной машины, равно как и обнуление счетчиков 74 - 77.
Сигналы с триггеров подаются на входы элементов И 38, 41, 44, 47, 50 53, 56 и 59 и, благодаря наличию инверторов 62 - 73 на Выходе элемента И 38 появляется 1, если край детали
11 занимает положение, показанное на
фиг.4& ; на выходе элемента И 41 когда край детали 11 занимает положение, показанное на фиг.4 в , и т.д. В свою очередь,тот из элементов И (38, 41, 44, 47, 50, 53, 56 или 59), на выходе которого появилась 1, открывает какую-либо пару из элементов И 39, 40; 42, 43; 45, 46; 48, 49 51, 52; 54, 55; 57, 58; 60, 61, которые пропускают на вход параллельных счетчиков 74, 75, 76 или 77 число с выхода регистров 29, 30, 31, 32. В указанных счетчиках происходит алгебраическое сложение чисел (сигналов рассогласования с соответствующей пары мостовых схем) и результирующее число хранится в них в течение одного такта, после чего сбрасывается по сигналу датчика положения главного вала швейной машины.
Таким образом, на выходе датчика появляется информация о том, по какой координате следует осуществлять коррекцию, а также знак и величина коррекции по координате. Поскольку эта информация представлена в число-- вом виде, ее можно использовать в системе привода перемещения детали 1 в швейной машине.
Формула изобретения
0
г, и
5
5
0
5 „
0
рых расположены в плоскости основания усеченного конуса световода осветите- ля.
вертор с третьим входом третьего элемента И третьей группы, третьим входом первого элемента Н четвертой группы и через девятый инвертор с третьим входом первого элемента И пятой группы, знаковый выход третьего аналого-цифрового преобразователя соединен с первым входом восьмого элемента И второй группы, пер- выми входами шестого и седьмого элементов И третьей группы и первым входом третьего элемента И пятой группы, выход четвертого элемента И первой
группы связан через четвертый триггер 15 входами пятого и восьмого элементов с четвертыми входами первого, второго И, выход второго элемента И связан с
вторыми входами шестого и девятого элементов И, выход третьего элемента
И соединен с вторыми входами четвери третьего элементов И второй группы, через десятый инвертор с четвертым входо м первого, а через одиннадцатый инвертор - с четвертым входом второго 20 того и седьмого элементов И, а выхо- элемента И, четвертым входом третьего ды четвертого, пятого, шестого, седь- элемента И третьей группы, через двенадцатый инвертор с четвертым входом первого элемента И четвертой группы
мого, восьмого и девятого элементов И связаны с соответствующими входами второго параллельного счетчика, в
и с четвертым входом первого элемента 25 четвертой группе первьш элемент И выИ пятой группы, цифровой выход четвертого цифроаналогового преобразователя соединен с первым входом де- вятох о элемента И второй группы, с первыми входами восьмого и девятого элементов И третьей группы и с первым входом третьего элемента И четвертой группы, при этом установочные входы триггеров и параллельных счетчиков связаны с шиной сброса, а во второй
10
группе первый элемент И выходом соединен с вторыми входа№1 четвертого и восьмого элементов И, выход второго элемента Н связан с вторыми входами пятого и шестого элементов И, выход третьего элемента И соединен с вторыми входами седьмого и восьмого элементов И, а выходы четвертого, пятого шестого, седьмого, восьмого и девятого элементов И связаны с сооответст- вующими входами первого параллельного счетчика, а в третьей группе выход первого элемента И соединен с вторыми
И соединен с вторыми входами четвертого и седьмого элементов И, а выхо- ды четвертого, пятого, шестого, седь-
того и седьмого элементов И, а выхо- ды четвертого, пятого, шестого, седь-
мого, восьмого и девятого элементов И связаны с соответствующими входами второго параллельного счетчика, в
ходом соединен с вторыми входами второго и третьего элементов И, выходы которых связаны с соответствующими входами третьего параллельного
счетчика, а в пятой группе выход первого элемента И соединен с вторыми входами второго и третьего элементов И, выходы которых связаны с соответ- cтвyюup ми входами четвертого параллельного счетчика.
S.t
fi ,, , f« „
X. « «.«C . JssTLJ
,(
LZ
Фи1. 5
18
сри&.:5
}4
)Uie4
Фиъ.В
li II
11
Ч §
э
23
38
34
79
30
35
С1
80
31
сд
JS
Г
ч
зг
37
СП
п
. фил.7
.
Составитель Б. Быковский
Редактор И. Сегляник Техред М.Ходанич
Заказ А415/34
. Тираж 398
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР , 113035, Москва, Ж-35 Раушская наб., д. 4/5
(X
Корректор С. Шекмар
Подписное
| Устройство для перемещения деталей при обработке их по контуру на швейной машине | 1977 |
|
SU630321A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
