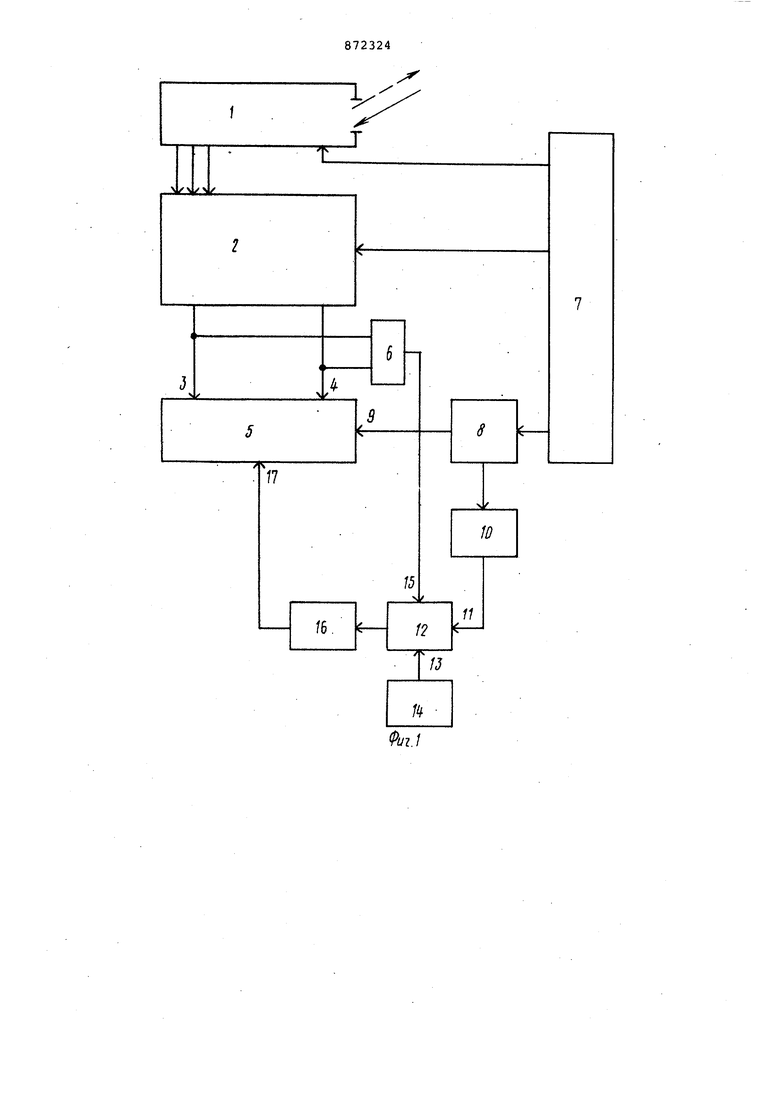
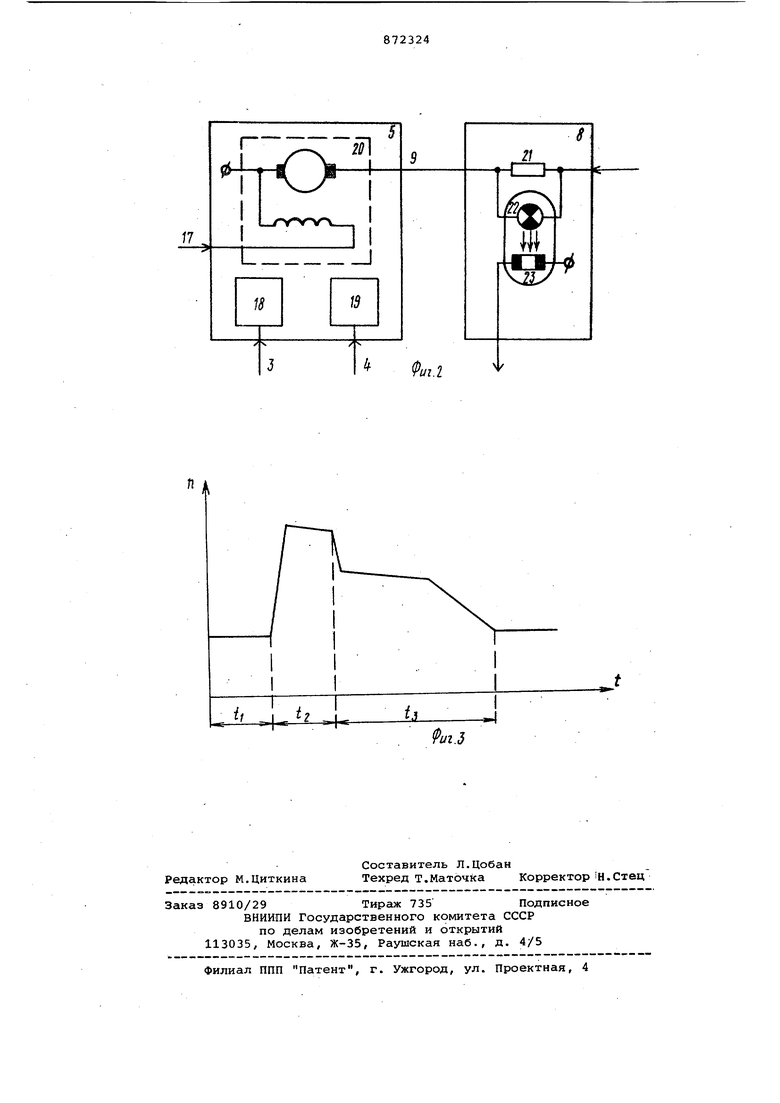
выходы элемента .И и датчика тока электродвигателя, а к выходу - испол нительный механизм, причем входы элемента И соединены с выходами электронного блока управления. Кроме того, датчик тока электродв гателя выполнен на оптроне. На фиг. 1 изображена блок-схема устройства/ на фиг. 2 - вариант выполнения датчика тока, связанного с электродвигателем исполнительного ме ханизма/, на фиг. 3. - график зависимости п оборотов эле-ктродвигателя ис полнительного механизма во времени t от режима работы исполнительного механизма. Устройство содержит фотооптический датчик 1, связанный с электронным блоком 2 управления, выходы кото рого связаны со входами 3 и 4 испол нительного механизма 5 и элементом И б. Блок 7 питания соединен сблоком. 2, фотооптическим датчиком 1 и датчиком тока 8, связанным со входом 9 исполнительного механизма 5. Выход датчика 8 тока подключен к усилителю 10 напряжения, соединенному со входом 11 электронного переключател 12, на вход 13 которого подключен источник 14 опорного напряжения, а на вход 15 - выход элемента И б. К выходу электронного переключателя 12 присоединен усилитель 16 постоян ного тока/ выход которого связан с управляющим входом 17 исполнительно го механизма 5. Исполнительный механизм 5 содержит электромагнитные муфты 18 и 19, служащие для включения необходимого направления вращения выходного вала исполнительного механизма 5 при поступлении команды на поворот, и электродвигатель 20 постоянного тока, в цепь якоря кото рого включен.резистор 21, шунтирующий осветительный элемент 22 оптрона. Выход с фоторезистора 23 оптрона является выходом датчика 8 тока. Устройство работает следующим об I разом. При отсутствии на входах 3 и 4 исполнительного механизма 5 управля щих напряжений (команд) на поворот электронный переключатель 12 коммутирует на управляющий вход 17 испол нительного механизма 5 фиксированно напряжение от источника 14 опорного напряжения. Это напряжение выбирает ся таким, чтобы электродвигатель 20 при отсутствии команд на поворот ра ботал на малых оборотах, что продле вает срок его службы и улучшает теп ловой( режим. . Поскольку команды на входах 3 и 4 исполнительного механи ма 5 отсутствуют, электрические муф ты не включены, электродвигатель ме ханически не связан с выходным валом исполнительного механизма, руле вое колесо не вращается (фиксируется/. При поступлении команды на один из входов 3 или 4 исполнительного еханизма 5 напряжение, появляющееся на выходе элемента И б, переключает на выход электронного переключателя 12 напряжение с его входа 11, связанного с усилителем 10 напряжения, который, в свою очередь, соединен с датчиком 8 тока. Включается одна из электромагнитных муфт 18 или 19, электродвигатель 20 механически связывается с выходным валом исполнительного механизма 5, и рулевое колесо начинает поворачиваться вначале с очень малым сопротивлением Сзона люфта. Электродвигатель 20 оказывается слабо .нагруженным, и ток в его якорной цепи очень мал, соответственно, мало и падение напряжения на резисторе 21. Осветительный элемент 22 рптрона при этом слабо освещает фоторезистор 23, связанный с усилителем 10 напряжения, с выхода которого в этом случае на вход 11 электронного переключателя 12 поступает такое напряжение, при котором обороты двигателя становятся максимальными, рулевое колесо, поворачиваясь с максимальной скоростью, быстро проходит зону люфта, и начинается рабочий ход, при котором объект уже начинает поворачиваться, сопротивление повороту рулевого колеса намного возрастает. Это вызывает увеличение тока в якорной цепи электродвигателя 20 и, соответственно, увеличение падения напряжения на резисторе 21. Осветительный элемент 22 оптрона начинает светить ярче, фоторезистор 23 намного уменьшает свою величину, и на выходе усилителя 10 появляется напряжение, пропорциональное яркости свечения осветительного элемента 22 оптрона. Это напряжение через электронный переключатель 12 и усилитель 16 постоянного тока подается на управляющий вход 17 исполнительного механизма 5, электродвигатель 20 которого начинает вращаться медленнее, но при этом обладает большим вращгшщим моментом, и исполнительный механизм поворачивает 8 этом случае рулевое колесо с такой скоростью, которая максимально возможна при данной мгновенной нагрузке. Этим достигается принцип оптимального управления. При уменьшении рассогласования между направлением движения объекта относительно светоконтрастной программы (поворот объекта почти заканчивается напряжение команд на входах 3 или 4 исполнительного механизма 5 начинает все чаще прерыватьсяi по мере .уменьшения рассогласования;, так как сказывается тот факт, что порог срабатывания электронный ключей, использованных в электронном блоке управления, больше порога отпускания, и применение
на входе электронных ключей интегрирующих элементов, как это сделано в известном устройстве, приводит к появлению на входах 3 или 4 исполнительного механизма 5 при уменьшении рассогласования между направлением движения объекта и светоконтрастноД программы широтно-импульсно-модулированного напряжения, поступающего на вход 15 электронного переключателя 12 и в момент импульса, коммутирующего на вход электронного переключателя 12 напряжение с усилителя напряжения 10, а в момент паузы напряжения с выхода источника 14 опорного напряжения. По мере уменьшения рассогласования длительность импульсов на входе 15 электронного переключателя 12 становится все короче а длительность пауз - все больше. Вследствие этого на управляющий вход 17 исполнительного механизма 5 начинает чаще поступать напряжение от источника 14 опорного напряжения, и электродвигатель 20 уменьшает свои обороты. Исполнительный механизм 5 начинает медленно доводить рулевое колесо до положения Рассогласование равно нулю, объект управления выходит на требуемую траекторию движения а его инерция массы при этом частично гасится, что снижает перерегулирование и повышает точность автовождения.
На фиг. 3 время t соответствует режиму работы электродвигателя 20 при отсутствии команд на поворот, время режиму поступления команды на поворот и выбору люфта, режиму рабочего хода.
Использование устройства повышает качество вождения за счет увеличения
быстродействия исполнительного механизма, облегчения его основного режима работы (при отсутствии команд на поворот), обеспечения плавного окончания отработки команды на поворот и реализации оптимального управления.
Формула изобретения
0
1.Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе, содержащее фотооптический датчик, подключенный выходами к электронному блоку управ5ления, выходы которого соединены с исполнительным механизмом, включающим в себя электродвигатель, о т лич ающееся тем, что, с це- . лью повышения качества и точности вождения, оно снабжено датчиком тока
0 электродвигателя исполнительного механизма, элементом И, элек ронным переключателем и источником опорного напряжения, подключенным к одному из входов электронного переключателя,
5
к другим входам которого подключены выходы элемента И и датчика тока электродвигателя, а к выходу - исполнительный механизм, причем входы элемента И соединены с выходами
D электронного блока управления.
2.Устройство по П.1, отличающееся тем, что датчик тока электродвигателя выполнен на оптроне.
5
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР №683662, кл. А 01 В 69/04, 1974 (прототип) .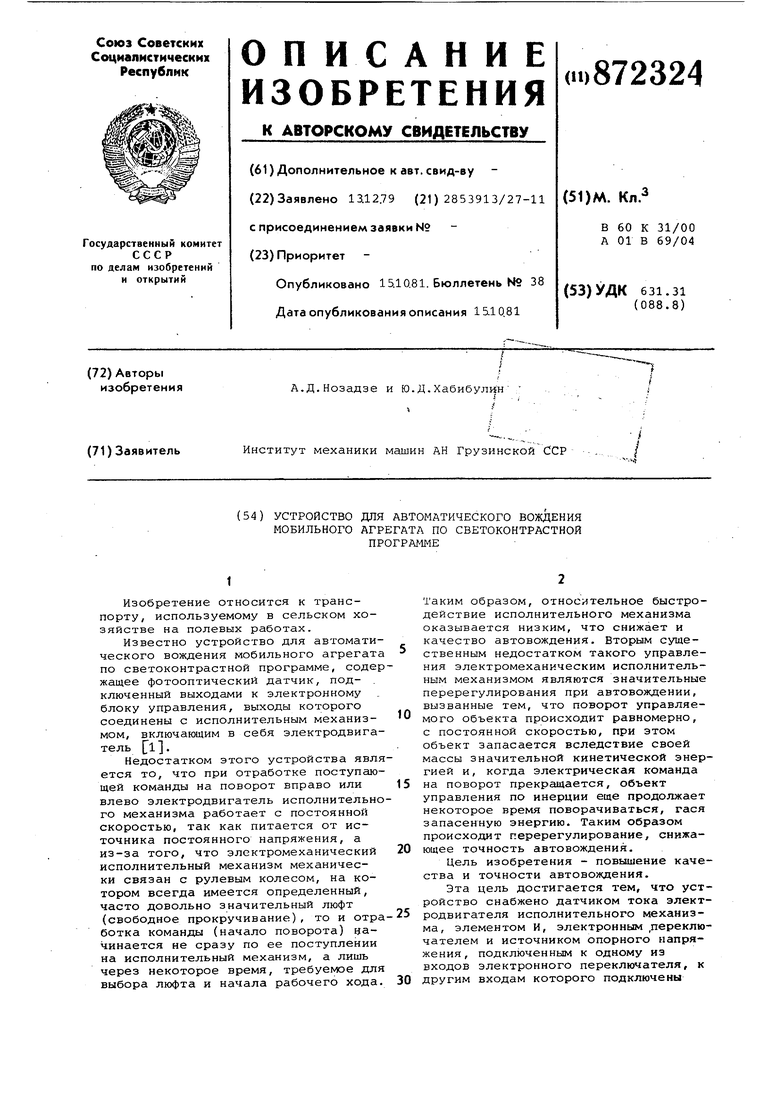

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения трактора по светоконтрастной программе | 1979 |
|
SU872325A1 |
| Устройство для автоматического вождения мобильного агрегата | 1985 |
|
SU1336965A1 |
| Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе | 1974 |
|
SU683662A1 |
| Устройство для автоматического вождения колесного трактора на безотвальной пахоте | 1981 |
|
SU1066473A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1972 |
|
SU327892A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2003 |
|
RU2249841C1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Устройство для автоматического поворота тракторного агрегата | 1977 |
|
SU727169A1 |
| Фотооптический датчик системы автоматического вождения мобильного агрегата | 1986 |
|
SU1423012A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МОБИЛЬНЫХ АГРЕГАТОВ | 2001 |
|
RU2224396C2 |