Изобретение относится к автоматичес кому измерению параметров работы экскаватора - драглайна и, в частности предназначено для автоматического опре деления массы груженого экскаватора. Известно устройство для взвешивания ковша экскаватора - драглайна, которое содержит узел контроля операции заполнения ковша, узел режима работы привода, узел контроля операций разгруз ки ковша, узел фиксации ковша в пространстве, счетчик суммарного угла поворота 1 а-1формы экскаватора, узел измерения величины загрузки ковша и иамери тельный датчик. Наряду с другими функциями данное устройство обеспечивает из мерение .массы ковш.а экскаватора в про цессе его перемещения в простраиствеМ. Однако при этом измеряется положе ние ковша в пространстве, и определение массы ковша производится с учетом его положения в пространстве во враля взвешивания цутем введения соответствующих коэффициентов, т.е. процесс сло жен. Известно устройство для учета работы экскаватора - драглайна, включающее аналого-дискретный преобразователь, р&версивные счетчики, счетчик числа преобразований, элементы ( ИЛИ, генератор импульсе, усилитель низкой частоты, двухполупериодный выпрямитель и пороговое устройство 2. Однако устройство сложно и при его испотльзовании также требуется опред&ление координат ковша в момент его взвешивания. Наиболее близким по технической сущности и реализации является устрсЛство для взвешивания ковша экскаватора - драглайна, включающее блок выделения статической составляющей токов приводов механизмов подъела и тяги ковша, связанный с якорными цепями этих приводов и подключенный ко входам блока измерения величины загрузки
380
ковша, к другим входам которого подключены выходной блок и блок управления, CinoK фиксации области пространства, ClnOK измерения угла поворота платформы, датчики длины тягового каната и jrna поворота платформы, которые свяЕины с соответствующими блоками з. Однако устройство хотя и обеспечивает измерение массы ковша драглайна, сно сложно, поскольку в устройстве исгюпьзуется блок фиксации области пространства с «соответствующим и датчиками, люторый обеспечивает введение коорди - натной поправки .при определении массы я:(жша. Кроме того, необходимость измерения координат ковша во время взвешиЕания создает и эксплуатационные неудобства: при кратковременном обесточива- кни экскаватора, при перетяжке канатов, при их замене необходимо настраивать блок фиксации области пространства.
Цель изобретения - упрощение устройства и повышение его надежности.
Поставленная цепь достигается тем, что блок измерения величины загрузки ковша выполнен в виде двух элементов выделения модулей сигналов, сумматора, трех ключей, двух интеграторов, одновибратора, компаратора, инвертора и nepeKnioчателя, причем один из эпементсв выделения модулей сигналсж непосредственно, а другой через инвертор подключен к сумматору, выход которого через последовательно соединенные первый ключ, первый интегратор, компаратор, одновибратор второй интегратор, второй ключ подключен ко второму входу первого интегратора вход второго интегратора через третий ключ связан с переключателем, управляющие входы первого и .третьего ключей подктпочены параллельно, а блок управления выполнен в виде интегратора, ком-, г:аратора, трех однови бра торов, трех элёл{ентов И,двух триггеров и двух инверто)Х)в, причем выход интегратора через последовательно соединенные компаратор, первый элемент И и первый однсеибра:х р соединен с соответствующим входом интегратора, выход компаратора через последовательно соединенные второй одновиб1)атор, первый инвертор подключен ко втог входу первого элемента И и к перьому входу второго элемента И, а через последовательно соединенные третий од- 1ювибратор и второй инвертор, подключен 1C первому третьего элемента И, вторые входы второго и третьего элеглентсе И соединены с выходом компаратора непосредственно, третий и четвертый входы второго элемента И поц пючны к инвертирующим входам первого и второго триггере, прямой выход первог триггера связан с третьим входом третьего элемента И, а выходы второго и третьего эпементсе И связаны с соответствующими входами первого и второго триггеров.
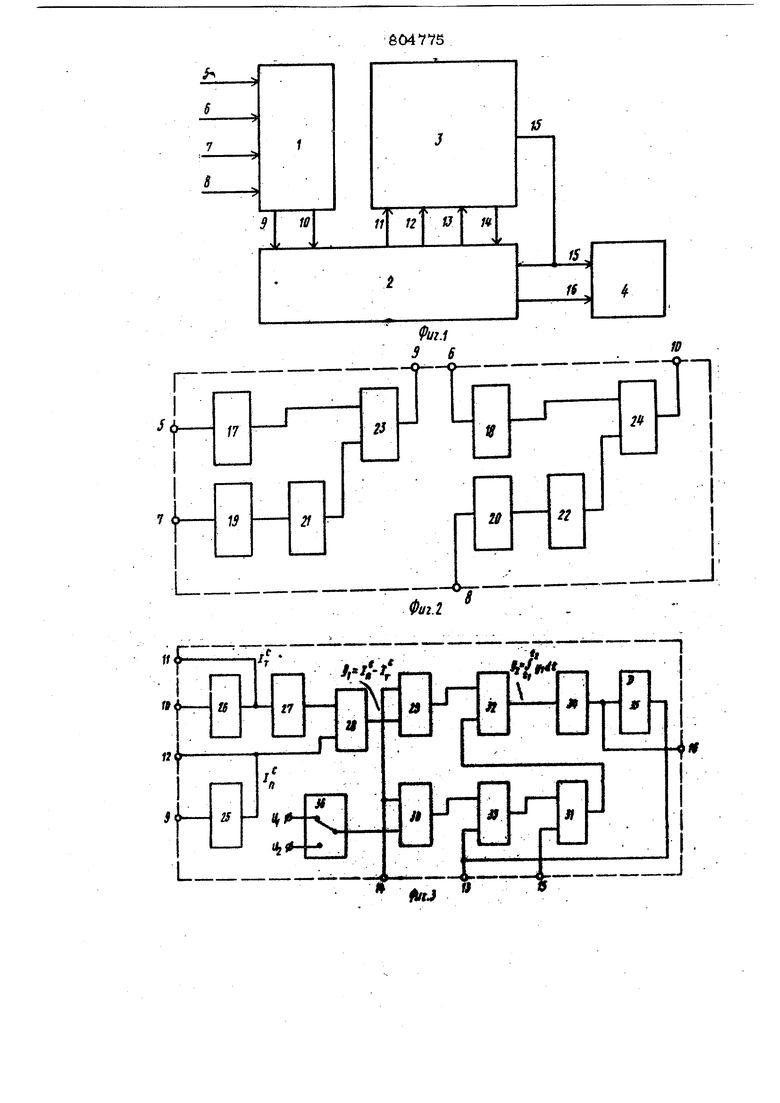
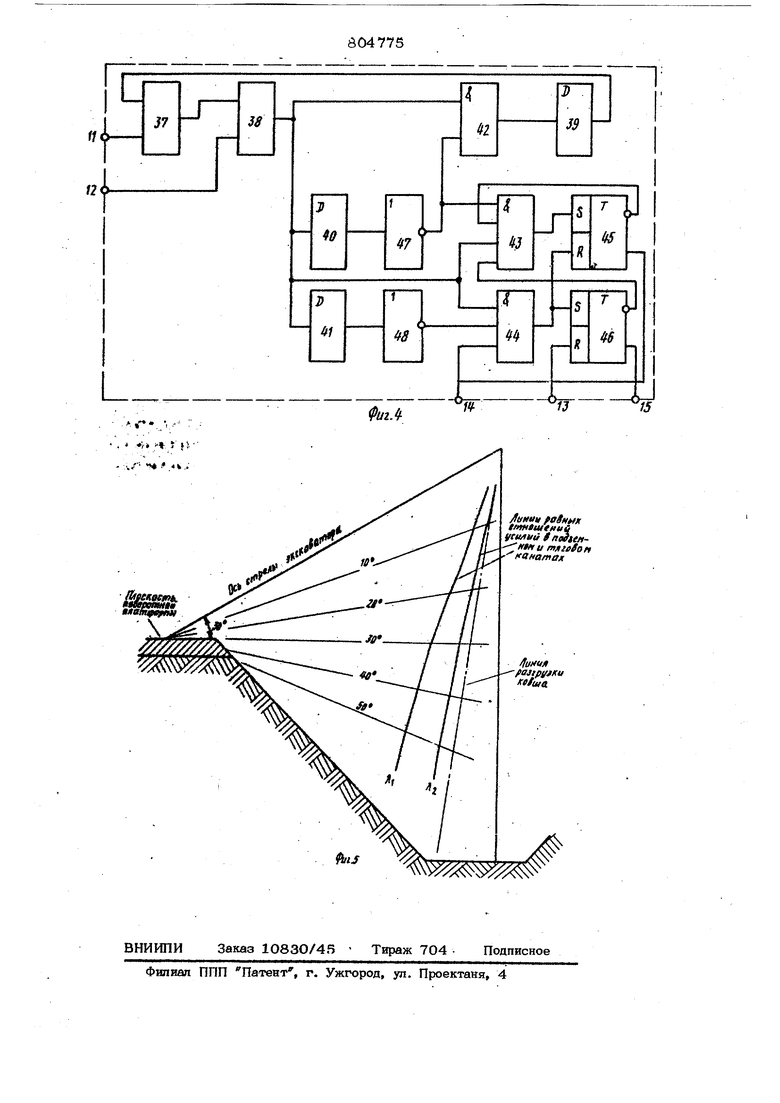
На фиг. 1 приведена блочная схема устройства для взвешивания ковша экскаватора - драглайна; на фиг. 2 - функциональная схема блока выделения статических токов приводов; на фиг. 3 функциональная схема блока измерения величины загрузки ковша; на фиг. 4 функциональная схема блока управления; на фиг. 5 - схема расположения линий равных отношений статических усилий и средние траектории движения ковша при верхней и нижней разгрузке последнего.
Устройство для взвешивания ковша драглайна содержит (фиг. 1) блок 1 выделения статических токов приводов, блок измерения величины загрузки ковша, бло 3 управления и выходной блок 4. Елок 1 подцепям 5-8 подключен соответственно к якорным цепям тока и напряжения двигателей механизма подъема и тяги ков- ша, выходы блока 1 по. цепям 9 и 10 подключены к соответствующим входам блока 2, Блок 2 по цепям 11-13 соединен со входами блока 3, по депям 14 и 15 - с выходами блока 3. Входы блока 4 соединены с выходами блока 3 по цепи 15 и с выходами блока 2 - по цепи 16. Блок 1 выделения статических токов приводов содержит (фиг. 2) дат чики токов 17 и 18 и напряжений 19 .и 20 якорных цепей приводов механизмов тяги и подъема ковша, дифференциаторы 21 и 22 и сумматоры 23 и 24. Входньш цепи сумматоров 23 и 24 связаны соответственно с выходами датчиков 1.7 и 18 тока и с выходами дифференциаторов 21 и 22, входы которых свзаны с соответствующими выходами датчике 19 и 2О напряжений. Блок 2 иэмерения величины загрузки ковша содержит (фиг. З) элементы 25 и 26 выделения модуля аналогового сигнала, инвертор 27, сумматор 28, ключи 29-31, интеграторы 32 и 33, компаратор 34, одновибратор 35 и переключатель 36. Элемент 26 через инвертор 27 подключен к одному входу сумматора 28, к другому входу которого подключен- элемент 25. Выход сумматора 28 через ключ 29 связан с одним интегратора 32, другой вход которого через 58 ключ 3.1 подключен к выходу интегратора 33. Выход ИНТЙ1 ратора 32 через поспедоват пьно соединенные компаратор 34, одновибратор 35 подключен к одному из входов интегратора 33. Другой вход интегратора 33 через ключ ЗО связан с переключателем 36. Управляющие входы ключей 29 и ЗО соединены параллельно, EVIOK 3 управления содержит (фиг. 4) интегратор 37, компаратор 38, однсвибраторы 39-41, элементы И 4244, триггеры 45 и 46, инверторы 47 и 48. Выход интегратора 37 подключен к соответствующйну входу компаратора 318 выход которого свяиан входами однсвибраторов 40 и 41 и элементами И 42-44 Выход одновибратора 40 через инвертор 47 подключен к входам элементе И 42 и 43, выход одновибратора 41 через инвертор 48 связан с входом элемента И 44. Выходы триггере 45 и 46 соединшы с соответствующими входами эпёментсв И 43 и 44, выходы которых no/t ключены к входам триггеров 45 и 46. Устройство работает следующим образом. В процессе экскавации на входы бло ка 1 по цепям 5 и 7 : поступают сигналы I „ и I пропорциональные полным токам якорных цепей двигателей механизмов подъема и тяги ковша, по цепям 6-8 - сигналы, пропорциональные напряжениям в тех же цепях. В соответствий с уравнением MC-M -DCJ- , 1 - Mg-CM g,, , где 0 - момент инерции привода ( скорость и .ускорение двигателя; MX, М - момент двигателя и момент со№ ротивления, - постоянные, зависящие от типов электродвигателей; Гд - сопротивление цепи якоря элек-г ропривода, Фй - магнитный поток возбуждения двигателя, - ток цепи якоря; - напряжение генератора и при условии (р- Ир, Ф -const, а ffi пренебрежимо мапо, на выходе сумMajropOB 23 и 24 формируются сигналыт с IP И 11. , пропорциональные статичес1шм составляющим якорных токсв двига-. телей подъема и тяги. Указанные сигна- пы по цепи 9 и Ю поступают в блок 2 на элементы 26 и 25 выделения модулей сигналов. Модули этих сигналов поступают на сумматор 28, на выходе которого формируется сигнал у - 1 -I. , поскольку модуль сигнала 1 инвертируется инвертором 27. Сигнал yj, поступает через ключ 29 на интегратор 32, который реализует следующую функцию -2-J i, Сигналы I И JL по цепям И и 12 поступают соответственно на компара тор 38 и интегратор 37. Ксямпаратор 38 срабатывает через враля Гц ..I поскольку на его выходе сигнал вырабатъюается при выполнении условия тСтС л In- где к - коэффициент пропорциональности. Выходной сигнал с компаратора 38 поступает на входы одновибраторов 4О и 41 и элемента И 42. Бели длительность t ц больше длительности импульса одновибратора 40, то на выходе эл сента И 43 появляется сигнал, триггер 45 переключается и по цепи 14 сигнал ii начала интегрирования (момент пересечвния ковшам линии Я фиг. 5) поступает на ключи 29 и 30, интегратор 32 блока 2 начинает интегрировать входной сигнал у,( , а интегратор 33 начинает интегрироват-Б опорный сигнал U J или и 2 t поступающий через ключ 30 в зависимости от положения переключателя 36. При возрастании веггачины 6q до значения,превышающего длительность импул ьса одновибратора 41, срабатывает элемент И 44, в результате чего переключается триггер 45 в исходное состояние и переключается триггер 46, в результате чего вырабатъюается сигнал 2 окончания интегрирования (момент пересечения ковшом линии Я 5). Интеграторы 32 и 33 прекращают интегрировать рходные сигналы, поскольку ключи 29 и ЗО переключаются в непроводящее состояние. Однсжременно ключ 31 переключается в проводящее состояние и сигнал с выхода интегратора 33 поступает на вход интегратора .32. В связи с тем, что сигнал выхода интегратора 33 имеет противоположный знак по сравнению с сигналом, поступающим на интегратор 32 через ключ 29, то интегратор начинает интегрировать выходной сигнал
804775
7
интегратора 33 до нулевого значения. Г)и достижении состояния интегратора 32 срабатывает ксмпаратор 34 н ва его выходе форми{уется сигнал, котораыв переключает однсжибратор 35 и по иепн 16 поступает в блок 4, Выходной сигнал оф1нснаибратора 35 приводит в состояние интегратор 33 и переключает TjHirrep 46 Поскольку на интеграторе 33 при NHHTerpHpOBaHHH входного сигнала выходное напряжение достигло урОБна, пропорционального времени tfli -i t то при подаче его на вход интегратора 32 определяется отрезок (. , равный среднему значению
радости In - IT время 2 в соответствии с выражением
K2l4-ti) (in-l)dS
и
2t,
j(
С тС
П
KjlVtJUo
где и о - и - при разгрузке груженого КСЮШ а выше горизонта стояния,
Ufl- (/2 - при разгрузке груженого ковша ниже горизонта стояния;
к л - коэффициент пропорцио нальностн.
Предлагаемое устройство проше , поскольку в нем отсутствует блок измерения координат, а блок измерения величины загрузки ковша и блок управления содержат меньшее число элементов и взаимосвязей между ними. Все это псюышает надежность предлагаемого устройсту ва и позволяет в производственных условия получать оперативную информацию о текущей производительности экскаватора, что дает возможность экипажу экскаватору раиионально распредели1 ресурсы (физические силы, время и т.д) в течение смены, наилучшим образец планировать последовательность видов работ в объеме сменного задания. Формула изобретения
Устройство для взвешивания ковша драглайна, включающее блок выделения статической составляющей токов приводов механизмов подъема и тягв ковша, , . связанный с якорными пенями этих npi ВОДОВ и подключенный ко входам блока измерения величины загрузки ковша, к другим входам которого подключены вы8
ходной блок и блок управления, отличающееся тем, что, с целью упрощения устройства и повышения его надежности, блок изм фения величины
загрузки ковша выполнен в виде двух элементсж выделения модулей сигнатв, сумматора, трех ключей, двух интеграторов, .сдновибратора, пара тора, инвертора и переключател, прупем один из элемш1тов
выделения модулей сигналов непосредст - венно, а другой через инвертор подключены к сумматору, выход которого через последовательно соединенные первый ключ, пefжый интегратор, компаратор,
5 одновибратор, второй интегратор, второй ключ подключен ко второму входу первого интегратора, вход второго интегратора через третий ключ связан с переключатег лем, управляющие входы первого и тре0 тьего ключей подключены параллельно, а блок управления выполнен в виде интегратора, компаратора, трех одновибраторов, трех элементов И, двух тригзтерсж и двух инверторов, причем выход интет
5 ратора через последовательно соединенные компаратор, пфвый пемент И и первый одновибратор соединен с соответствующим вxoдcav{ интегратора, выход компа ратора через последовательно соединевQ ные второй одновибратор, первый элемент НЕ подключён ко второму входу первого элемента Инк первому входу второго элемента И, а через последовательно соединенные третий одновибратор и второй элемент НЕ подключен к первому входу третьего элемента И, вторые входы второго и третьего элементов И соединены с выходе компаратора непосрес ственно, третий и четвертый входы второго элемента И подключены к инвертирующим входам первого и второго триггеров, прямой выход первого триггера связан с третьим входом третьего элемента И, а выходы второго и третьего элементов И связаны с соответст
5 вующими входами первого и второго триггеров...
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 0 № 32730, кл. Е 02 F 9/20, 1969.
2.Авторское свидетельство СССР № 446599, кл. Е 02Р9/2О, 1973.
3.Авторское свидетельство СССР по заявке № 2344689/03, кл. Е 02p9/20i
5 1976.
t-1
/7
П
I
W
W
У
f2
2ff
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля производитель-НОСТи ОдНОКОВшОВОгО эКСКАВАТОРА | 1977 |
|
SU812891A1 |
| Устройство для измерения работы экскаватора-драглайна | 1976 |
|
SU634232A1 |
| Устройство для учета работы транспортного оборудования | 1984 |
|
SU1182123A2 |
| Способ регулирования тока адаптивного электропривода | 1986 |
|
SU1372571A1 |
| Устройство для определения положения экскавационной машины в пространстве | 1980 |
|
SU937622A1 |
| Способ определения веса ковша экскаватора-драглайна | 1976 |
|
SU662820A1 |
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |
| Измеритель нелинейности амплитудной характеристики радиоэлементов | 1986 |
|
SU1370615A1 |
| Устройство для управления приводом механизма поворота экскаватора-драглаина | 1978 |
|
SU905382A1 |
-О
Фаг.г
