,) - токи якоря двигателя механизма подъема при установленной минимальной, загрузке ковша (при максимально допустимой 117005 8 величине налипания горной массы к ковшу), а простой экскаватора определяют как одновременное отсутствие выполнения операции черпания и отсутствие нагрузки привода механизма подъема.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля и учета работы экскаватора-мехлопаты | 1987 |
|
SU1425277A1 |
| Способ автоматического учета основных показателей работы драглайна | 1986 |
|
SU1421830A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| Устройство для измерения работы экскаватора драглайна | 1976 |
|
SU737575A2 |
СПОСОБ АВТОМАТИЧЕСКОГО УЧЕТА ОСНОВНЫХ ПОКАЗАТЕЛЕЙ РАБОТЫ ДРАГЛАЙНА, основанный на измерении тока якорной цепи двигателя механизма, подъема ковша и определении цикла экскавации путем контроля последовательного выполнения операций черпания, транспортировки груженого и порожнето ковша, отличающийjс я тем, что, с целью упрощения и повьшения точности учета, измеряют нагрузку привода механизма поворота, фиксируют наличие или отсутствие ее, фиксируют .работу привода механизма тяги на внешней характеристике, фиксируют направление вращения вала двигателя тяги и определяют операцию черпания как одновременное в течение не менее, чем 2-5 с, выполнение услдвий sign НПП 0 sign РТВ 1 sign РТЛН 1, определяют операцию транспортировки груженого ковша как одновременное в течение не менее, чем 2-5 с, выпол- нение условий л 1уст/р sign НПП 1 sign РТВ 1 sign РТЛС 1, определяют операцию транспортировки порожнего ковша как одновременное в течение не менее, чем 2-5 с, выполнение условий In . 1 iC:, пор, I sign sign , (Л где sign НПП О - сигнал, .характеризующий отсутствие нагрузки привода механизма поворота, sign - сигнал, характеризу ющий нагрузку привода механизма поворота. sign ющий работу приводао механизма тяги на внешней характерисСП тике. 00 sign (sign РТЛС 1) . зующий вращение вала двигателя тяги при наматывании (сматывании) каната с барабана лебедки, фактический ток якоря двигателя механизма подъема.
Изобретение относится к измерению параметров выполненной работы при проведении горных работ открытым способом с применением экскаваторадраглайна, более точно при выполнении вскрышных бестранспортных работ, и, в частности, предназначается для учета количества выполненной работы (подсчет числа циклов экскавации) и длительности простоя. Известны способы, обеспечивакяцие автоматический учет основных показателей работы драглайна: измерение величины загрузки ковша по току якорной цепи двигателя механизма подъема, контроль выполнения цикла экскавации измерение длительности полноценного цикла экскавации, операции заполнения ковша и определение подготовленности горной массы кэкскавации по отношению средних длительностей операций черпания и цикла экскавации Л . Наиболее близким к предлагаемому является способ автоматического учета .основных показателей работы драглайна, в котором предусматривается изменение тока якорной цепи двигателя механизма подъема ковша, угла поворота платформы, определение элементов цикла экскавации путем контроля последовательности выполнения операций черпания, транспортировки груженого и порожнего ковша, измерение фактических длин свисающих частей тягового и подъемного канатов, определение и фиксация объема выполненной работы в перемещенных ковшах установленной загрузки 2 . Однако в известием способе недостаточно надежно определяются основные операции цикла экскавации, вследствие чего возможны ошибки при определении цикла экскавации: возможна имитация цикла экскавации с порожним ковшом, который будет засчитан как полноценный (за счет искусственного создания переходных режимов работы главных приводов экскаватора), кроме того необходимо измерять относительно большое число переменных (ток якорной цепи привода механизма подъема ковп1а, угол поворота платформы, длины свешивающихся частей тягового н подъемного канатов), что в итоге усложняет практическое использование способа. Цель изобретения - упрощение и повьш1ение точности учета основных показателей работы драглайна. Поставленная цель достигается тем, что согласно способу автоматического учета основных показателей работы драглайна, основанному на измерении тока якорной цепи двигателя механизма подъема ковша и определении цикла экскавации путем контроля последовательного вьтолнения операций черпания, транспортировки груженого и порожнего ковша, измеряют нагрузку привода механизма поворота, фиксируют наличие или отсутствие ее, фиксируют работу привода механизма тяги на внешней характеристике, фиксируют направление вращения вала двигателя тяги и определяют операцию черпания как одновременное в течение не менее, чем 2-5 с, выполнение условий: sign НПП О sign РТВ 1 sign РТЛИ 1, определяют операцию транспортировки груженого ковша как одновременное в течение не менее, чем 2-5 с, выполнение условий I-.n lycT.rp. sign НПП 1 sign PTB 1 sign РТЛС 1 определяют операцию транспортировки порожнего ковша как одновременное в течение не менее, чем 2-5 с, вьшолне ние условий I I Ijcr.ttOp. sign НПП 1 sign PTB О где sign НПП О - сигнал, характери зующий отсутствие нагрузки привода механизма поворот sign НПП 1 сигнал, характери зующий нагрузку привода механизма поворота, sign PTB 1 сигнал, характери зующий работу при вода механизма тя ги на внешней характеристике. sign РТЛН 1 (sign РТЛС 1) сигнал, характеризующий вращение вала двигателя тя ги при наматывани (сматывании) кана та, с барабана лебедки, фактический ток якоря двигателя механизма подъема ,)- токи якоря двига-ijcT. rp. .ijop теля механизма подъема при установленной минимал ной загрузке ковш (при максимально допустимой величи не налипания горной массы к ков- шу) , а простой экскаватора определяют как одновременное отсутствие выполнения операции черпания и отсутствие нагрузки привода механизма подъема. Действительно, реализация опера. ции черпания sign А 1 определяется течение 2-5 с. как одновременное в выполнение условий sign НПП О sign PTB 1 sign РТЛН 1 1 sign Him сигнал, характеризующий нагрузку привода механ1тзма поворота (нагрузка есть - sign НПП 1, нагрузка отсутствует sign Hlin 0), sign PTB 1 сигнал, характеризующий работу привода механизма тяги на внешней характеристике. sign РТЛН . - сигнал, характеризующий вращение вала двигателя тяги при наматывании каната. акое определение и последующий роль исполнения надежно фиксируыполнение операции черпания в ессе экскавации, поскольку элеы операции являются необходиьа1ми статочными признаками даннойопеи, которые учитываются лишь при актической длительности не менее новленной величины, что практии не позволяет имитировать операчерпания без ее практического лнения. налогичный принцип использован определении и контроле выполнения ации транспортировки груженого а sign ТГК 1, если одноврементечение 2-5 с выполняются усло п чc, гр. sign НПП 1 sign PTB 1 sign РТЛС 1. 1 фактический ток якоря двигателя механизма подъема, ток якоря двигателя механизма подъема при установленной минимальной загрузке ковша, sign РТЛС сигнал, характеризующий вращение вала двигателя тяги при сматывании с барабана лебедки. р№ определении и контроле вьшоля операции транспортировки порожнего ковша sign ТПК 1, если одновременно в течение 2-5 с выполняются условия Ц -Scl.noi) sign НШ 1 sign РТВ 1 ТОК якоря двигателя ijCI. пор механизма подъема пр максимально допустим величине налипания (намерзания горной массы к ковшу). При определении простоя также обеспечивается надежность контроля фактического состояния экскаватора, поскольку при зтом используются ранее определенные операции процесса экскавации. Сигнал простоя sign если одновременно выполняются услов sign 4 sign НП где sign НП - сигнал, характеризующи нагрузку привода механизма подъема ковша (нагрузка есть sign НП 1, нагрузка отсутствует sign НП О). Таким образом, надежное определение выполнения основных операций цик ла экскавации обуславливает надежный контроль исполнения цикла экскавации с заданными параметрами загрузки и разгрузки ковша. Кратковременные воз мущения, являющиеся следствием переходных процессов в главных приводах управляемых машинистом экскаватора, которые удовлетворяют одному или все условиям 1-3 не оказьюают влияния на точность определения числа циклов эк скавации, поскольку их длительность значительно меньше 2-5 с, в течение которых определяются операции цикла экскавации. На фиг.1 приведена структурная схема устройства, реализующего спосо на фиг. 2-9 - функциональные схвм1)1 блоков устройства. Предлагаемый способ включает следунвдие ocrioBHbie операции: -в процессе экскавации измеряют ток якорной цепи двигателя механизма подъема ковша, -измеряют нагрузку привода механизма поворота. -фиксируют наличие или отсутствие нагрузки привода механизма поворота, -фиксируют работу привода механизма тяги на внешней характеристике, -фиксируют направление вращения вала двигателя тяги, -определяют операцию черпания как одновременное в течение не менее, чем 2-5 с выполнение условий sign НПП О sign РТВ 1 sign РТЛН 1 -определяют операцию транспортировки груженого ковша как одновременное в течение не менее 2-5 с выполнение условий 1„ 1|,ст. рр sign НПП 1 sign РТВ 1 sign РТЛС 1 -определяют операцию транспортировки порожнего ковша как одновременное в течение не менее, чем 2-5 с выполнение условий if - уст. Г70р. sign НПП 1 sign РТВ О -определяют вьтолнение цикла экскавации как последовательное выполнение операций черпания (sign ), транспортировки груженого ковша (sign ТГК 1), транспортировки порожнего ковша (sign ТПК 1), -определяют простой экскаватора как одновременное выполнение условий sign sign НП О В предлагаемом способе обеспечивается при минимальном объеме входной информации надежное определение выполнения основных операций цикла экскавации и тем самым простыми средствами обеспечивается надежное определение вьшолнения каждого цикла экскавации. Кроме того, обеспечивается надежно и простыми средствами определение длительности простоя экскаватора по различным причинам, при зтом простои фиксируются как внутри циклов экскавации (т.е. между любыми операциями цикла), так и мсжцу циклами окскавации.
Техническая реализация способа существенно упрощается за счет измерения только одного параметра, характеризующего состояние экскаватора - величины тока якорной цепи привода механизма подъема ковша и контр-оля параметров,характеризующих положение ко- . мандоаппаратов управления главными приводами экскаватора (sign НШ, sign РТВ, sign РТЛН, sign РТЛС).
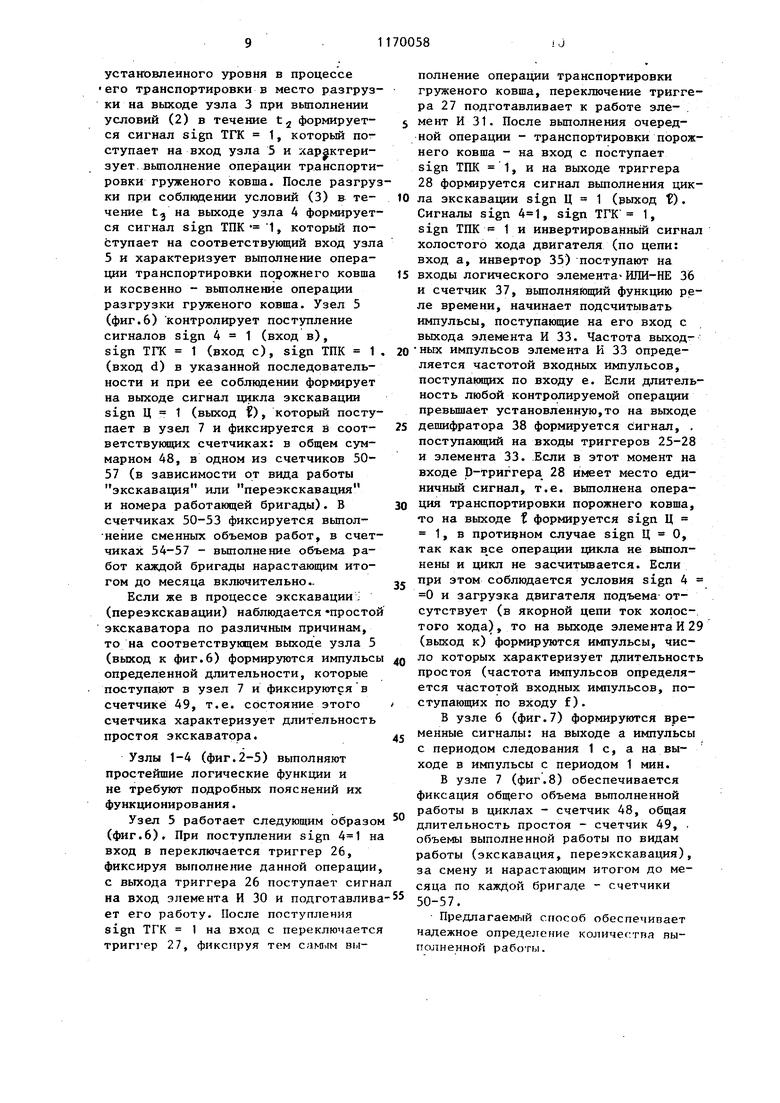
В состав устройства, реализующего способ,, входят следующие функциональные узлы (фиг.1): узел 1 измерения загрузки ковша, узел 2 контроля операции черпания, узел 3 контроля операции транспортирования груженого ковша, узел 4 контроля операции транспортирования порожнего ковша, узел 5 контроля последовательности выполнения операций цикла экскавации, узел 6 сигналов времени, узел 7 памяти, узел 8 управления и выходной индикатор 9. Узел 1 соответствующими выходами связан с узлами 3-5. Выходы узлов 2-4 подключены к соответствуюпщм входам узла 5, другие входы которого связаны с выходами узла 6. Выходы узла 5 подключены к входам узла 7, другие входы которого связаны с выходами узлов 6,8. Входы выходного индикатора 9 подключены к соответствующим выходам узлов 7,8.
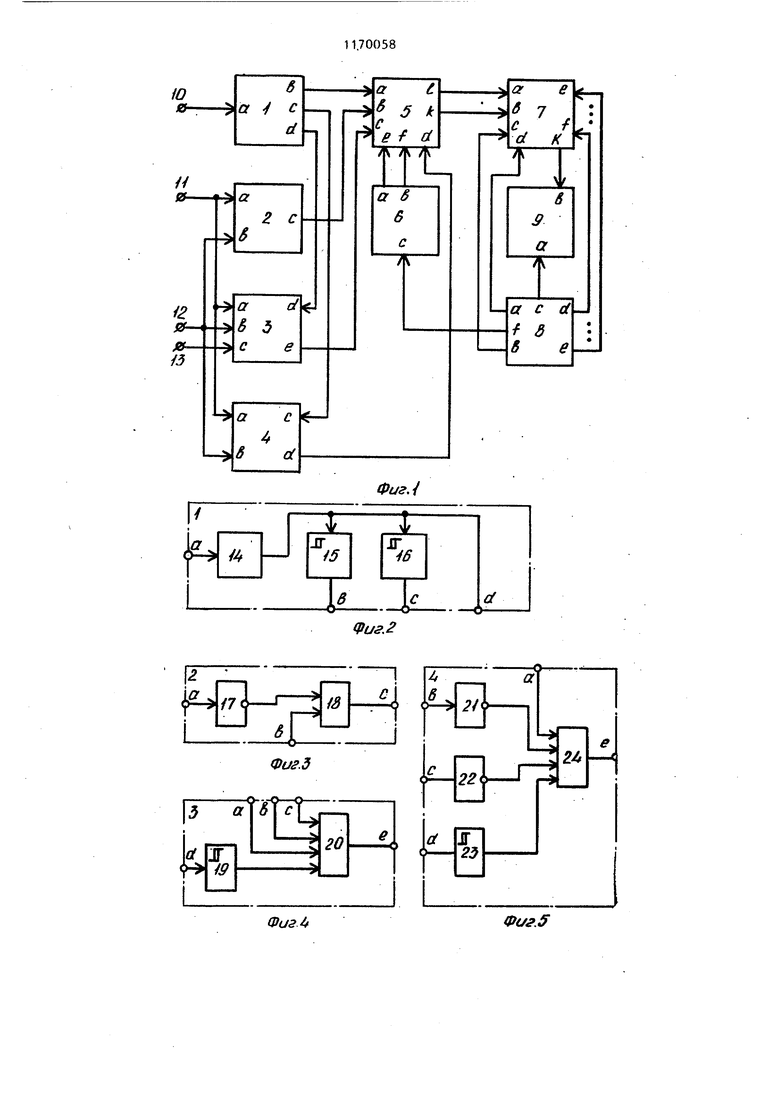
Вход узла 1 по цепи 10 подключен к якорной цепи - двигателя механизма подъема ковша. Входы узлов 2-4 по цепям 11-13 подключены к выходам станции управления главными приводами экскаватора, вырабатывающим сигналы sign НШ, sign РТВ, sign РТЛН, sign РТЛС. . Узел 1 содержит (фиг.2) усилитель постоянного тока 14 и подключенные к его выходам пороговые элементы 15, 1
Узел 2 содержит (фйг.З) инвертор 17 и подключенный к его выходу логический элемент И 18.
Узел 3 содержит (фиг.4) пороговый элемент 19 и подключенный к его выходу логический элемент И 20.
Узел 4 содержит (фиг.5) инверторы 21, 22, пороговьй элемент 23 и логический элемент . Выходы элементов 21-23 подключены к соответствующим входам элемента 24.
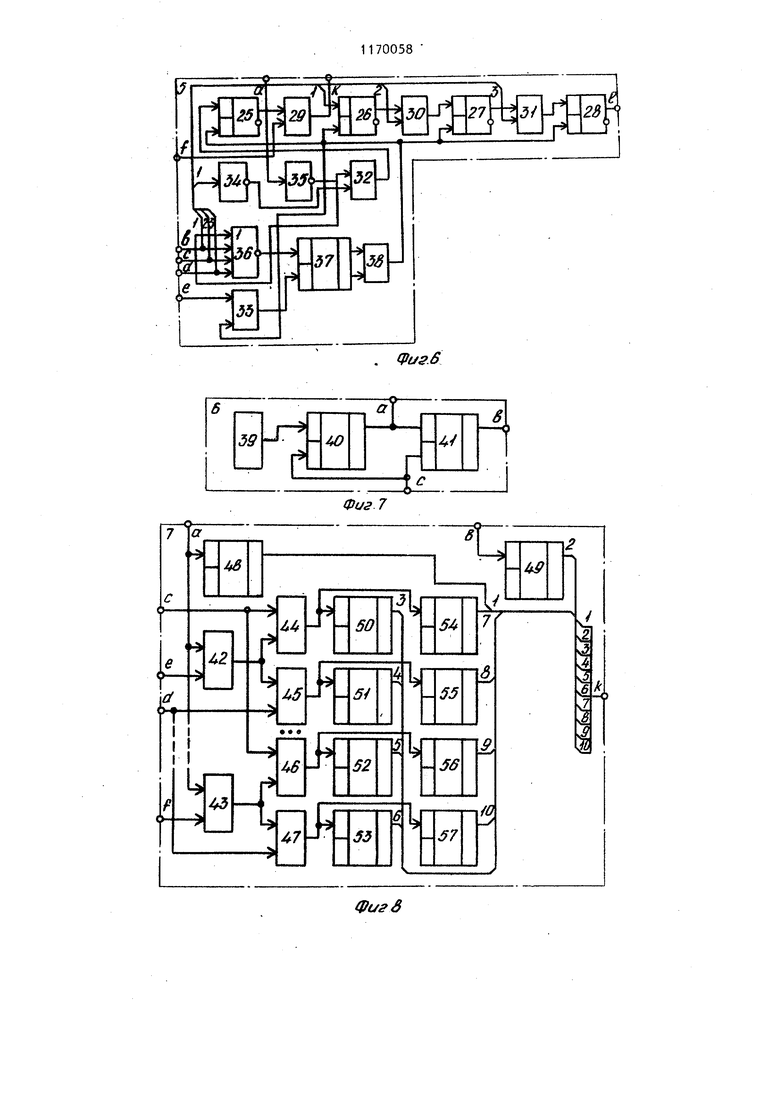
Узел 5 содержит (фиг.6) триггеры 25-28, логические элементы И 29-33, инверторы 34, 35, логический эле-
мент ИЛИ-НЕ 36, триггер 37 и дешифратор 38. Соответствуюисие входы элементов 26, 80, 31, 32, 34, 36 подключены параллельно, выход триггера 25 подключен к входу элемента И 29, выход триггера 26 подключен к соответствующему входу элемента И 30, другой вход триггера 26 подключен параллельно входам элементов 25, 27, 28, 33 и к выходу дешифратора 38. Выход эле-. мента И 30 подключен к входу триггера 27, выход которого через элемент И 31 .связан с входом триггера 28. Выход инвертора 34 через элемент И 32 подключен к входу триггера 25. Другой вход элемента И 32 подключен к выходу инвертора 35.
Входы счетчика 37 подключены к выходам элементов 33, 36, а выходы его связаны с входами дешифратора 38.
Узел 6 содержит (фиг.7) генератор импульсов 39, счетчики 40, 41. Один вход счетчика 40 подключен к выходу генератора 39, а выход его подключен к входу счеТчика 41. Другие входы счетчиков 40, 41 подключены параллельно.
Узел 7 содержит (фиг.8) логические схемы И 42-47 и триггерные счетчики 48-57. Выходы схем И 42-43 через соответствующие схемы И 44-47 подключены к входам счетчиков 49-53, выходы которых подключены к входам счетчиков 54-57. Соответствующие входы счетчика 48.и схем И 42, 43 подключены параллельно.
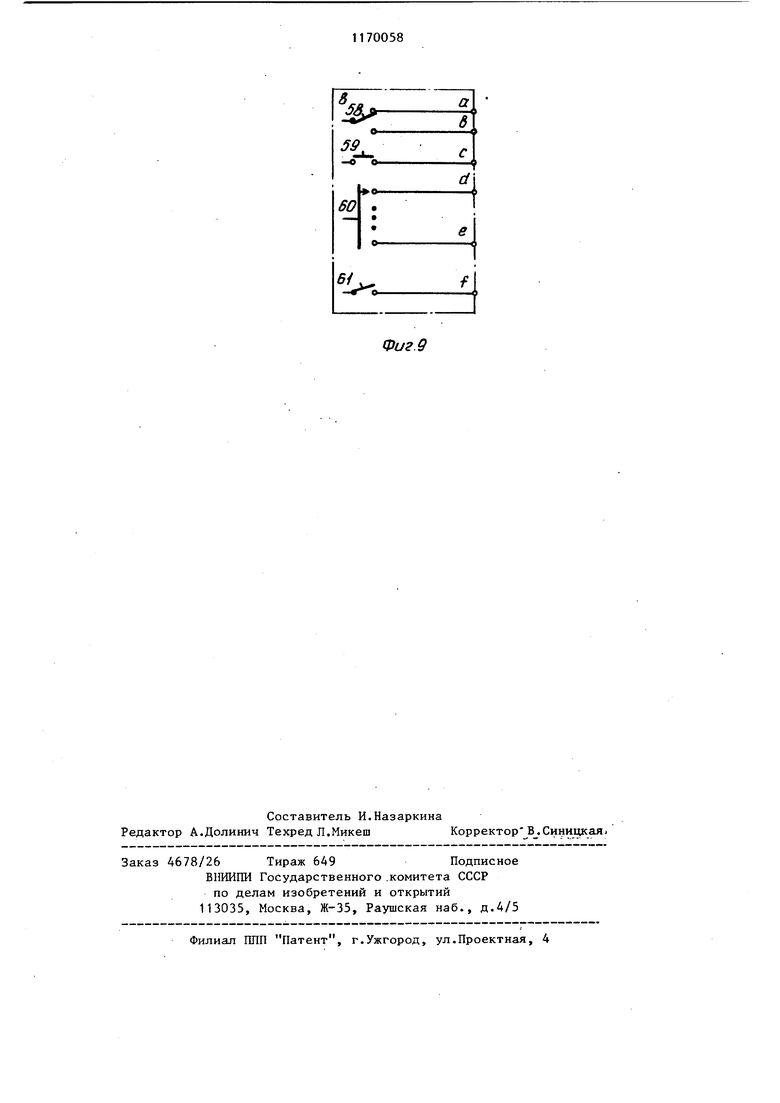
Узел 8 управления содержит (фиг.9) переключатель 58 режима работы экскавация, переэкскавация, ключ 59 включения выходного индикатора 9, переключатель 60 бригад и кнопку 61 установки счетчиков узла 6 в нулевое положение.
Устройство работает следующим образом.
В процессе экскавации (переэкскавации) на выходах узла 1 (фиг.1) формируются сигналы, характеризуюш 1е загрузку ковша (груженый - выход d, порожний - с, холостой ход приводного двигателя механизма подъема в, которые поступают соответственно на входы узлов 3, 4 и- 5. При вьтолнении условий (1) в течение t , на выходе узла 2 формируется sign , который постугКгет на соответствующий вход узла 5. После заполнения ковша до
установленного уровня в процессе его транспортировки в место разгрузки на выходе узла 3 при вьшолнении условий (2) в течение t формируется сигнал sign ТГК 1, который поступает на вход узла 5 и характеризует, выполнение операции транспортировки груженого ковша. После разгрузки при соблюдении условий (3) в течение tj на выходе узла 4 формируется сигнал sign ТПК 1, который поступает на соответствующий вход узла 5 и характеризует выполнение операции транспортировки порожнего ковша и косвенно - выполнение операции разгрузки груженого ковша. Узел 5 (фиг.6) контролирует поступление сигналов sign (вход в), sign ТГК 1 (вход с), sign ТПК 1 , (вход d) в указанной последовательности и при ее соблюдении формирует на выходе сигнал цикла экскавации sign Ц 1 (выход f), который поступает в узел 7 и фиксируется в соответствукщих счетчиках: в общем суммарном 48, в одном из счетчиков 5057 (в зависимости от вида работы зкскавация или переэкскавация и номера работающей бригады). В счетчиках 50-53 фиксируется вьшолнение сменных объемов работ, в счетчиках 54-57 - вьшолнение объема работ каждой бригады нарастающим итогом до месяца включительно..
Если же в процессе экскавации J (переэкскавации) наблюдается «простой экскаватора по различным причинам, то на соответствующем выходе узла 5
(выход к фиг. 6) формируются импульсы
определенной длительности, которые поступают в узел 7 и фиксируются в счетчике 49, т.е. состояние этого счетчика характеризует длительность простоя экскаватора.
Узлы 1-4 (фиг.2-5) выполняют простейшие логические функции и не требуют подробных пояснений их функционирования.
Узел 5 работает следующим образом (фиг.6), При поступлении sign на вход в переключается триггер 26, фиксируя выполнение данной операции, с выхода триггера 26 поступает сигна на вход элемента И 30 и подготавлива ет его работу. После поступления sign ТГК 1 на вход с переключается трипер 27, фиксируя тем выполнение операции транспортировки груженого ковша, переключение триггера 27 подготавливает к работе элемент И 31. После вьшолнения очередной операции - транспортировки порожнего ковша - на вход с поступает sign ТПК 1, и на выходе триггера 28 формируется сигнал выполнения цикла экскавации sign Ц 1 (выход t). Сигналы sign , sign ТГК 1, sign ТПК f 1 и инвертированньй сигнал холостого хода двигателя (по цепи: вход а, инвертор 35) поступают на входы логического элемента- ИЛИ-НЕ 36 и счетчик 37, выполняющий функцию реле времени, начинает подсчитывать импульсы, поступающие на его вход с выхода элемента И 33. Частота выходных импульсов элемента К 33 определяется частотой входных импульсов, поступающих по входу е. Если длительность любой контролируемой операции превьш1ает установленную,то на выходе дешифратора 38 формируется Сигнал, , поступакяций на входы триггеров 25-28 и элемента 33. Если в этот момент на входе р-триггера 28 имеет место единичный сигнал, т.е. выполнена операция транспортировки порожнего ковша, то на выходе f формируется sign Ц 1, в противном случае sign Ц О, так как операции цикла не выполнены и цикл не засчитьшается. Если при этом соблюдается условия sign 4 0 и загрузка двигателя подъема отсутствует (в якорной цепи ток холостого хода), то на выходе элемента И 29 (выход к) формируются импульсы, число которых характеризует длительность простоя (частота импульсов определяется частотой входных импульсов, поступающих по входу f).
В узле 6 (фиг.7) формируются временные сигналы: на выходе а импульсы с периодом следования 1 с, а на выходе в импульсы с периодом 1 мин.
В узле 7 (фиг.8) обеспечивается фиксация общего объема выполненной работы в циклах - счетчик 48, общая длительность простоя - счетчик 49, , объемы выполненной работы по видам работы (экскавация, переэкскавация), за смену и нарастающим итогом до месяца по каждой бригаде - счетчики 50-57.
Предлагаемый способ обеспечипает надежное определение колнчес:тпа выполненной работы.
ФигМ
Фиг.2
Фt/.J
. (PUS.6
Фиг 7
Фигб
Фиг.9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 759670, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УЧЕТА ОСНОВНЫХ ПОКАЗАТЕЛЕЙ РАБОТЫ ДРАГЛАЙПА | 0 |
|
SU343043A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
