1
Изобретение относится к робото- , технике, н частности к манипуляторам предназначенным для работы в труднодоступных местах, характеризую0;ихся узкими искривленными пространствами, например для выполнения окрасочных операций сложных внутренних полостей объектов.
Цель изобретения - расширение технологических возможностей робота за счет обеспечения различной жесткости у отдельных модулей исполнительного устройства промышленного робота и повышение точности работы конструкции (точности позиционирования )за счет совершенствования центрирующего механизма.
На фиг, I изображена принципиальная, схема исполнительного устройства промьш1ленного робота; на фиг, 2 - конструкция механизма центрирования; на фиг, 3 - сечение А-/ на фиг, 1,
Исполнительное устройство про- мышленного робота состоит из основания I, установленных на нем идентичных модулей 2, последовательно соединенных межд,у собой и образующих упругое хоботообразное звено, Каждьй модуль выполнен в виде двух сферических сегментов 3, закрепленных на фланцах 4 и контактирующих меявду собой по сферическим поверхностям, На фланцах 4 выполнены отверстия 5, через которые пропущены гибкие тяги б и 7, например тросы,жестко закрепленные на последнем от основания 1 модуле 2 .и связанные через выходные валы 8 и 9 с соответствующими приводами 10 и I1,
Механизм центрирования выполнен в виде двух стержней 12 и 13, соединенных между собой сферическим шарниром 14,
В сферических сегментах 3 выполнены направляющие, направление I OTOрых совпадает с осью симметрии последних, в которых установлены стержни 12 и 13, связанные через упругие элементы 15 и 16, например пружинами растяжения, с соответствующими, фланцами 4,
Исполнительное устройство промьш1т ленного робота работает следующим образом,:
66 2
Пусть при обработке управляющего сигнала приводом 10 выходной вал 8 привода вращается по часовой стрелке. Тогда правая ветвь гибкой тяги 6 наматывается на него, а левая сматывается, В результате сферические сегменты 3 обкатываются друг относительно друга по сферическим поверхностям, и фланцы 4 каждого модуля 2 начинают поворачиваться в плоскости чертежа. Упругое хоботообразное звено в целом занимает положение, показанное на фиг, 1. Работа привода 1i, связанного через
выходной вал 9 с гибкой тягой 7 аналогична описаннрй,
i
При обкатке сферических сегментов не должно происходить проскальзывание, для этого и используется механизм центрирования (фиг, 2),
Механизм центрирования работает следующим образом.
Сферические сегменты 3 кинематически связаны друг с другом через стержни 12 и 13, соединенные между собой сферическим шарниром 14. Кдасдый из стержней 12 и 13 притянут к фланцу 4 соответствующего .
сферического сегмента 3 упругими элементами 15 и 16, например пружинами растяжения,.При обкатке сферических сегментов 3 центр сферического шарнира 14 всегда остается в тачке пересечения продольньпс осей контактирующих сферических сегментов 3. В результате на контактирующих элементах достигается чистое качение,
В различных модулях 2 могут быть установлены пружины растяжения различной жесткости. За счет подбора пружин растяжения можно достигнуть
такого закона изменения жесткости звена рцоль его длины, который необходим для вьтолнения технологической задачи. Можно подобрать пружины растяжения так, чтобы под действием нагрузки звено изгибалось по простому закону, по дуге окружности. Это может значительно упростить алгоритмы управления упругим хоботообразным звеном.
н:
::.
-):
-J:
/
XI
1
10
а
9
;:А
iX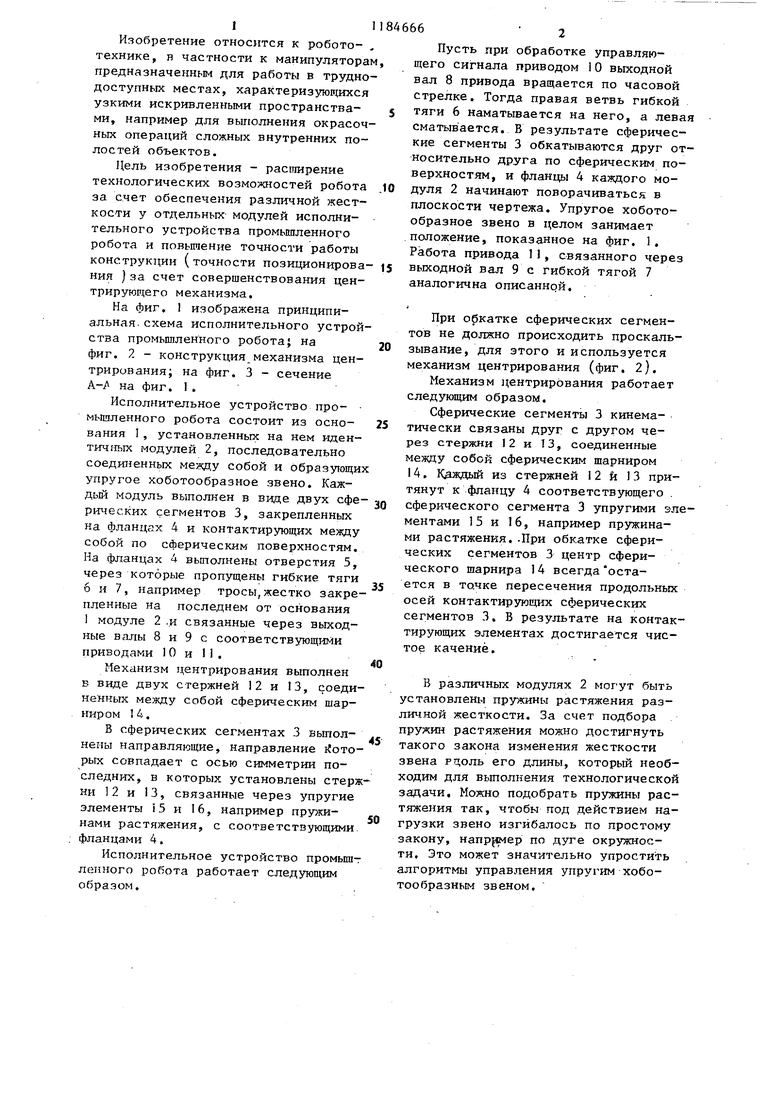
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительное устройство промышленного робота | 1985 |
|
SU1256954A1 |
| Исполнительное устройство промышленного робота | 1985 |
|
SU1301701A1 |
| Исполнительное устройство промышленного робота | 1984 |
|
SU1202852A1 |
| Исполнительное устройство промышленного робота | 1985 |
|
SU1333577A1 |
| РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2535837C2 |
| ОПОРА СЕЙСМОСТОЙКОГО СООРУЖЕНИЯ | 2010 |
|
RU2427693C1 |
| ОПОРА СЕЙСМОСТОЙКОГО СООРУЖЕНИЯ | 2009 |
|
RU2405096C1 |
| УПАКОВКА ДЛЯ ХРУПКИХ ГРУЗОВ | 1992 |
|
RU2074105C1 |
| Внутренний центратор для сборки под сварку кольцевых стыков | 1990 |
|
SU1756088A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В.А. | 2015 |
|
RU2600953C1 |

ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО ПРОМЫШЛЕННОГО РОБОТА, содержащее основание, установленные на нем приводы и идентичные модули, последовательно соединенные между собой, при этом модуль вьшолнен в виде сферических сегментов, закрепленных на фланцах, установленных на центрирующем механизме и контактирующих между собой по сферическим поверхностям, при зтом на фланцах выполнены отверстия, через которые проходят гибкие тяги, жестко закрепленные на последнем от основания модуле и связанные с соответствуюгу ми приводами, отличающееся тем, что, с целью расширения технологических возможностей и повышения точности позиционирования, центрирующий механизм вьшолнен в виде двух подпружиненных стержней для каждого модуля, установленных в направляющих, вьто1шенных в сферических ментах, направление которых совпасл дает с осью симметрии последних, ори этом стержни одними концами связаны между собой сферическим шарниром, а другими - с соответствукяцим фланцем через упругий элемент. 00 4 Од а Од
э
Фиг. i
(риг. г
Х/1
| Хобот манипулятора | 1983 |
|
SU1114546A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Патент Швеции № 7902366-7, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
