Изобретение относится к робототехнике, в частности к манипуляторам, предназначенным для работы в труднодоступных местах, характеризующихся узкими искривлениями пространства и может быть использовано, например, для выполнения окрасочных операций внутренних полостей объектов. Цель изобретения - расширение зоны обслуживания за счет изменения линейной длины одних модулей исполнительного устройства и изменения жесткости всей конструкции.
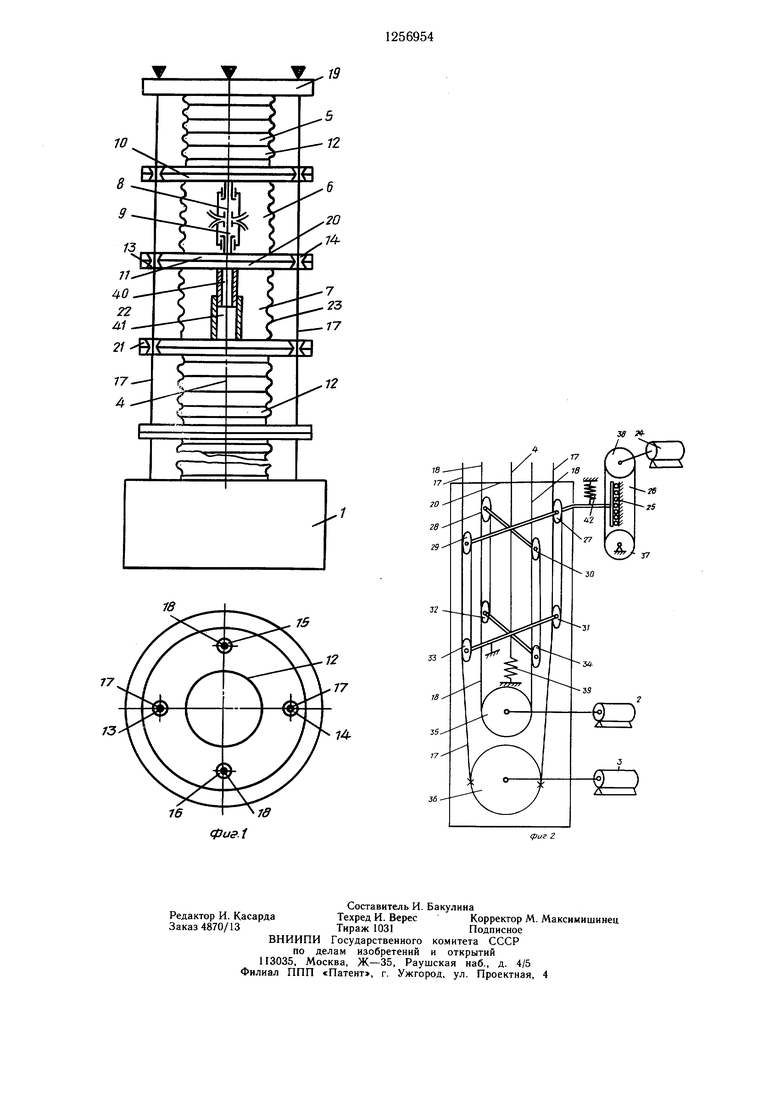
На фиг. 1 изображено исполнительное устройство промышленного робота, общий вид; на фиг. 2 - кинематическая схема механизма изменения относительного положения элементов поступательных пар.
Исполнительное устройство промышленного робота содержит основание 1, установленные на нем приводы 2 и 3 и последовательно соединенные посредством центрирующего гибкого элемента 4 модули 5-7. Часть модулей (например модуль 6) выполнены в виде контактирующих между собой сферических сегментов 8 и 9, закрепленных на фланцах 10 и 11, связанных между собой упругим элементом 12. Во фланцах имеются отверстия 13-16, через которые проходят гибкие тяги 17 и 18, жестко закрепленные на фланце 19 последнего от основания модуля и связанные с соответствующими приводами 2 и 3. Дополнительные модули 7 выполнены в виде двух фланцев 20 и 21, соединенных между собой поступательной парой 22 и упругим элементом 23. Механизм изменения относительного положения элементов поступательных пар, связанный с дополнительным приводом 24, выполнен в виде каретки 25, установленной в прямолинейных направляющих 26 основания 1 и двух групп блоков: 1-я группа составлена из блоков 27- 30 соответственно; 2-я группа - из блоков 31-34, огибаемых гибкими тягами 17 и 18 соответствующих приводов 2 и 3. 1-я группа блоков 27-30 установлена на каретке 25, а 2-я группа блоков 31-34 - на основании 1. Гибкие тяги 17 и 18 связаны с соответст
5
0
5
вующими приводами 2 и 3 через шкивы 35 и 36. Подвижная каретка 25 связана с приводом 24 через блоки 37 и 38. Центрирующий элемент 4 крепится к основанию 1 через пружину 39. Поступательная пара 22 выполнена, например, в виде двух полых соосных цилиндров 40 и 41, жестко связанных с соответствующими фланцами 20 и 21. Пружина 42 крепится к каретке 25 и предназначена для снятия нагрузки с привода 24.
Исполнительное устройство работает следующим образом.
При отработке управляющих сигналов приводами 2 и 3 соответствующие шкивы 35 и 36 начинают вращаться по часовой или против часовой стрелки. Гибкие тяги 17 и 18 наматываются на шкивы 35 и 36. Контактирующие сферические сегменты 8 и 9 начинают обкатываться один по другому, и все исполнительное устройство отклоняется вправо или влево.
Для изменения линейных размеров исполнительного устройства подается управляющий сигнал на привод 24. При вращении блока 38 по часовой стрелке каретка 25 начинает двигаться вверх по направляющей 26. Одновременно двигаются вверх закрепленные на каретке 25 блоки 27-30. Изменяется длина гибких тяг 17 и 18, что приводит к изменению линейных размеров модулей 7. Цилиндр 40 поступательно перемещается в цилиндре 41. Упругие элементы 23 сжимаются, изменяя жесткость всей 0 конструкции. Пружина 42 частично снимает нагрузки с привода 24.
При вращении блока 38 против часовой стрелки каретка 25 двигается по направляющей 26 вниз. Длины гибких тяг 17 и 18 увеличиваются. Под действием упругих элементов 23 линейные размеры модулей 7 увеличиваются, а следовательно, увеличивается общая длина всего исполнительного устройства. Пружина 39 при уменьшении длины всего звена сжимается, подтягивая Q центрирующий гибкий элемент 4, а при увеличении длины звена - растягивается, увеличивая жесткость всей конструкции.
5
V /ff
75
/3
39
36
сриг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительное устройство промышленного робота | 1984 |
|
SU1202852A1 |
| Исполнительное устройство промышленного робота | 1984 |
|
SU1184666A1 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Модуль промышленного робота | 1986 |
|
SU1393621A1 |
| Модульный манипулятор | 1980 |
|
SU952578A1 |
| Исполнительное устройство промышленного робота | 1985 |
|
SU1301701A1 |
| ИНТУИТИВНАЯ МАССАЖНАЯ СИСТЕМА МАНИПУЛЯТОРНОГО ТИПА (ВАРИАНТЫ) | 2022 |
|
RU2785828C1 |
| Мобильное роботизированное шасси для надреза мульчирующей пленки над растением с последующей ее фиксацией | 2022 |
|
RU2785580C1 |
Составитель И. Бакулина
Редактор И. КасардаТехред И. ВересКорректор М. Максимишинец
Заказ 4870/13Тираж 1031Подписное
ВНИИПИ Государствеиного комитета СССР
по делам изобретений и открытий
ИЗОЗб, Москва, Ж-35, Раушская иаб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Исполнительное устройство промышленного робота | 1984 |
|
SU1202853A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
