Изобретение относится к робототехнике, в частности к манипуляционным системам.
Известен манипулятор модульного типа (А.С. 1174256), содержащий модуль, образованный шестью тягами с приводами, изменяющими длины этих тяг, а также двумя фланцами, в трех точках каждого из которых расположены центры сферических шарниров, связывающих концы тяг фланцами.
Недостатком известной конструкции является ее сложность.
Известна манипуляционная система (Пат. 419421, Швеция), выполненная в виде набора последовательно расположенных и контактирующих друг с другом сферическими поверхностями дисков, кинематически связанных пропущенным через центральные отверстия дисков центрирующим тросом, натянутым упругим элементом, при этом в дисках по периферии имеются четыре отверстия, через которые пропущены управляемые тросы, каждый из которых прикреплен к дальнему от основания диску и связанные попарно с приводами, расположенными в основании.
Недостатком известной конструкции является ограниченные функциональные возможности, обусловленные возможностью изгиба системы только в виде дуги.
Технический результат изобретения - расширение функциональных возможностей путем увеличения количества степеней подвижности за счет введения в систему дополнительного гибкого звена.
Указанный технический результат достигается тем, что робототехническая система содержит гибкое звено, выполненное в виде набора последовательно расположенных и контактирующих друг с другом сферическими поверхностями дисков, кинематически связанных, пропущенными через центральные отверстия дисков, центрирующим тросом, натянутым упругим элементом, при этом в дисках по периферии имеются четыре отверстия, через которые пропущены управляемые тросы, каждый из которых прикреплен к дальнему от основания диску и связанные попарно с приводами, расположенными в основании, причем дальний от основания диск является основанием дополнительного гибкого звена, также выполненного в виде набора последовательно расположенных дисков, при этом их управляемые тросы связаны со своими, расположенными в основании первого гибкого звена, приводами через оболочку, обходящую первое гибкое звено.
Сущность изобретения поясняется чертежами, где:
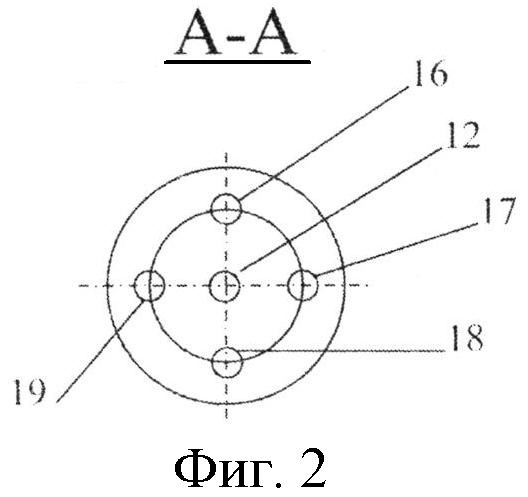
на фиг. 1 изображена робототехническая система,
на фиг. 2 - сечение А-А на фиг. 1,
на фиг. 3 - робототехническая система с двумя дополнительными гибкими звеньями.
Робототехническая система содержит последовательное соединенные основное и дополнительное гибкие звенья.
Основное гибкое звено состоит из набора дисков 1-11, контактирующих друг с другом сферическими поверхностями. В дисках звена имеются отверстия: четыре по периферии диска и одно вдоль оси. Через эти отверстия пропущены тросы, каждый из которых прикреплен к дальнему от основания диску 11. Центральный трос 12 натянут упругим элементом 13 и образует с ним механизм натяжения, одновременно выполняя функции центрирования дисков 1-11. Периферийные тросы 16-19 попарно 17 и 19, 16 и 18 связаны с управляемыми приводами 14 и 15. Последний диск 11 является основанием дополнительного гибкого звена, выполненного конструктивно аналогично основному гибкому звену, при этом его центральный 20 и периферийные тросы 21-24 связаны с своими управляемыми приводами 25 и 26, расположенными в основании основного гибкого звена, через оболочки 27, обходящими основное гибкое звено.
Робототехническая система может содержать несколько дополнительных гибких звеньев.
Робототехническая система работает следующим образом. Приводами 14 и 15, 25 и 26 осуществляется натяжение соответствующих периферийных тросов 16-19 и 21-24, при этом происходит деформация гибких звеньев. Каждому набору положений приводов соответствует некоторая деформация гибких звеньев.
Последовательный набор таких звеньев, состоящих из простых и одинаковых элементов, обеспечивает возможность вынесения всех приводов на основание, что позволяет создавать чрезвычайно гибкие манипуляционные системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения характеристик раскрытия парашюта в аэродинамической трубе | 2021 |
|
RU2780608C1 |
| МАНИПУЛЯТОР | 1996 |
|
RU2111113C1 |
| Исполнительное устройство промышленного робота | 1984 |
|
SU1184666A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА | 2014 |
|
RU2572218C9 |
| ОТРАЖАТЕЛЬ ИЗЛУЧЕНИЯ | 2000 |
|
RU2185695C1 |
| МАНИПУЛЯТОР | 2003 |
|
RU2247648C1 |
| ГИБКАЯ УПРАВЛЯЕМАЯ ТРУБКА ДЛЯ ЭНДОСКОПА | 2001 |
|
RU2255645C2 |
| ТРУБКА ДЛЯ ЭНДОСКОПИИ | 1994 |
|
RU2086170C1 |
| Гибкая управляемая трубка для эндоскопии | 1981 |
|
SU1026762A1 |
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |

Изобретение относится к робототехнике, в частности к манипуляционным системам. Робототехническая система содержит основание, гибкое звено, выполненное в виде набора последовательно расположенных и контактирующих друг с другом сферическими поверхностями дисков, кинематически связанных пропущенным через центральные отверстия дисков центрирующим тросом, натянутым упругим элементом. При этом в дисках по периферии выполнены четыре отверстия, через которые пропущены управляющие тросы, каждый из которых прикреплен к дальнему от основания диску и связанные попарно с приводами, расположенными в основании. Дальний от основания диск является основанием дополнительного гибкого звена, также выполненного в виде набора последовательно расположенных дисков со сферическими поверхностями, при этом их управляемые тросы связаны со своими, расположенными в основании первого гибкого звена, приводами через оболочки, обходящие первое гибкое звено. Робототехническая система может содержать несколько дополнительных гибких звеньев, причем все управляющие приводы расположены в основании первого гибкого звена. Технический результат - увеличение количества степеней подвижности. 1 з.п. ф-лы, 3 ил.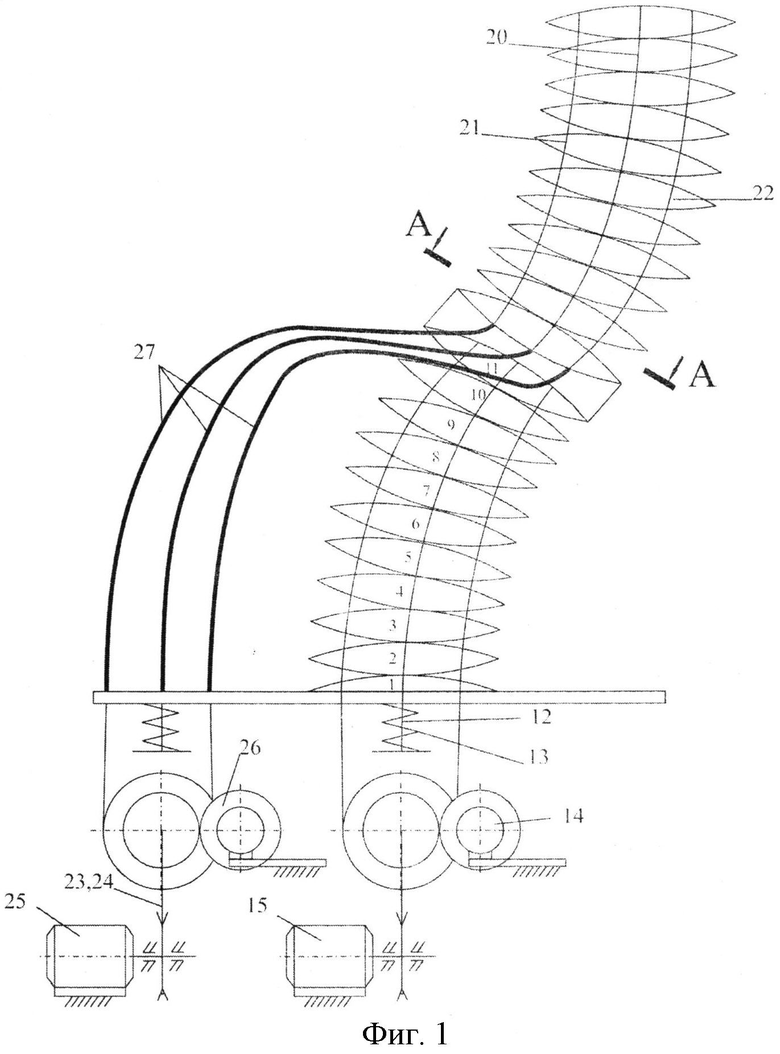
1. Робототехническая система, содержащая основание, гибкое звено, выполненное в виде набора последовательно расположенных и контактирующих друг с другом сферическими поверхностями дисков, кинематически связанных пропущенным через центральные отверстия дисков центрирующим тросом, натянутым упругим элементом, при этом в дисках по периферии выполнены четыре отверстия, через которые пропущены управляющие тросы, каждый из которых прикреплен к дальнему от основания диску и связанные попарно с приводами, расположенными в основании, отличающаяся тем, что дальний от основания диск является основанием дополнительного гибкого звена, также выполненного в виде набора последовательно расположенных дисков со сферическими поверхностями, при этом их управляемые тросы связаны со своими, расположенными в основании первого гибкого звена, приводами через оболочки, обходящие первое гибкое звено.
2. Робототехническая система по п.1, отличающаяся тем, что она содержит несколько дополнительных гибких звеньев, причем все управляющие приводы расположены в основании первого гибкого звена.
| US 4393728 A1,19.07.1983; | |||
| МАНИПУЛЯТОР | 1996 |
|
RU2111113C1 |
| Кассета для бутыломоечных машин с цепным конвейером | 1956 |
|
SU107090A1 |
| ГИБКИЙ МАНИПУЛЯТОР | 2003 |
|
RU2259916C9 |
| Рука манипулятора | 1987 |
|
SU1450995A1 |
| US 20120209253 A1, 16.08.2012; | |||
| Устройство для подачи оправки трубопрокатного стана | 1986 |
|
SU1395398A1 |

