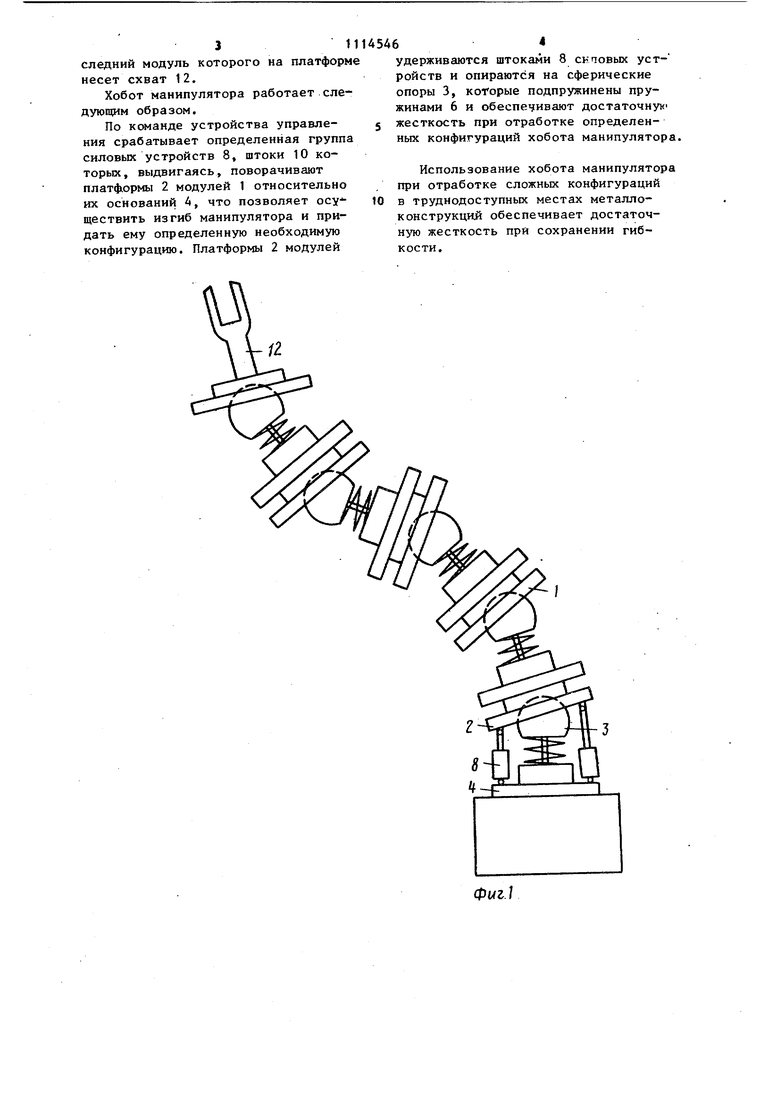
Изобретение относится к робототехнике, в частности к манипуляторам, предназначенным для работы в труднодоступных местах металлоконструкций. Известен исполнительный орган манипулятора, предназначенный для работы в труднодоступных местах ме таллоконструкций, который выполнен в виде фермы с треугольной решеткой и поясом, составленным из шарнйрно соединенных приводов поступа тельного движения С11. Недостатком манипулятора является то, что при отработке определенной конфигурации его звенья обязательно располагаются в одной плоскости, т.е. исполнительный орган этой конструкции лишен возможности изгибаться достаточно произвольно в пространстве. Причем к линейным приводам указанного исполнительного органа предъявляются особые требования, учитывая то, чт линейные приводы при основании дол ны иметь достаточно большую силу тяги, чтобы обеспечить перемещение исполнительного органа. Известен хобот манипулятора, со держащий последовательно соединенные идентичные модули, каждый из которых выполнен в виде плaтфqpмы со сферическим углублением, а также силовые устройства, расположенные по периферии модуля таким обра зом, что корпуса этих силовых устройств шарнирно закреплены на осно вании, а их штоки - на платформе С2 Недостатком известного хобота манипулятора является то, что его жесткость при отработке определенных конфигураций исполнительного о гана достигается исключительно за счет усилий, развиваемых силовыми приводами, что снижает его-техноло гические возможности и ухудшает ди мические характеристики. Целью изобретения является распшрение технологических возможностей и улучшение динамических харак теристик. Поставленная цель достигается т что в хоботе манипулятора, содержа последовательно соединенные иденти ные модули, КПЖД1.111 из которых выполнен в виде платформы со сфериче ским углублением, охватывающим сфе рическую опору, связанную с основа нием, а такл.е силовые устройства, расположенные по периферии модуля таким образом, что корпуса этих силовых устройств шарнирно закреплены на основании, а их штоки - на платформе, в каждом модуле сферическая опора связана с основанием элементами кинематической поступательной пары, при этом между основанием и сферической опорой размещен дополнительно введенный упругий элемент. Кроме того, сферическая опора снабжена сепаратором, в ячейках которого размещены шарики. На фиг. 1 изображен хобот манипулятора, общий вид; на фиг. 2 - модуль хобота манипулятора, общий Jид; на фиг. 3 - конструктивные элементы модуля (платформа, сферическая опора), продольный разрез; на фиг. 4 узел 1 на фиг. 2 (шарнирное крепление штоков силовых устройств); на фиг. 5 - возможная схема, размещения силовых устройств. Хобот манипулятора состоит из идентичных модулей 1, последовательно соединенных друг с другом. Каждый модуль 1 выполнен в виде платформы 2, имеющей сферическое углебление, которое охватывает сферическую опору 3. Последняя связана с основанием 4 элементами кинематической поступательной пары, а именно посредством направляющего стержня 5, несущего сферическую опору 3, размещенную в пазу 6 основания 4, и подпружинена относительно основания пружиной 7. По периферии модуля установлены силовые устройства 8, например гвдравлические цилиндры. Корпуса 9 гидравлических цилиндров шарнирно закреплены на основании 4, а их штоки 10 на платформе 2. Сферическая опора 3 снабжена сепаратором, в ячейках которого размещены плавающие шарики 11. Плаваюшие шарики способствуют скольжению платформы 2 по сферической опоре 3 при переходе модуля из одного положения в другой. Модули последовательно соединены друг с другом. Основание одного модуля жестко соединено с платформой смежного модуля. Таким образом осуществляется взаимосвязь всех модулей и образуется хобот манипулятора, по311
следний модуль которого на платформе несет схват 12.
Хобот манипулятора работает следующим образом.
По команде устройства управления срабатывает определенная группа силовьк устройств 8, штоки 10 которых, выдвигаясь, поворачивают платф1Ормы 2 модулей 1 относительно их оснований А, что позволяет осуществить изгиб манипулятора и придать ему определенную необходимую конфигурацию. Платформы 2 модулей
1А5464
удерживаются штоками 8 силовых устройств и опираются на сферические опоры 3, которые подпружинены пружинами 6 и обеспеуивают достаточнук 5 жесткость при отработке определенных конфигураций хобота манипулятора
Использование хобота манипулятора при отработке сложных конфигураций 10 в труднодоступных местах металлоконструкций обеспечивает достаточную жесткость при сохранении гибкости.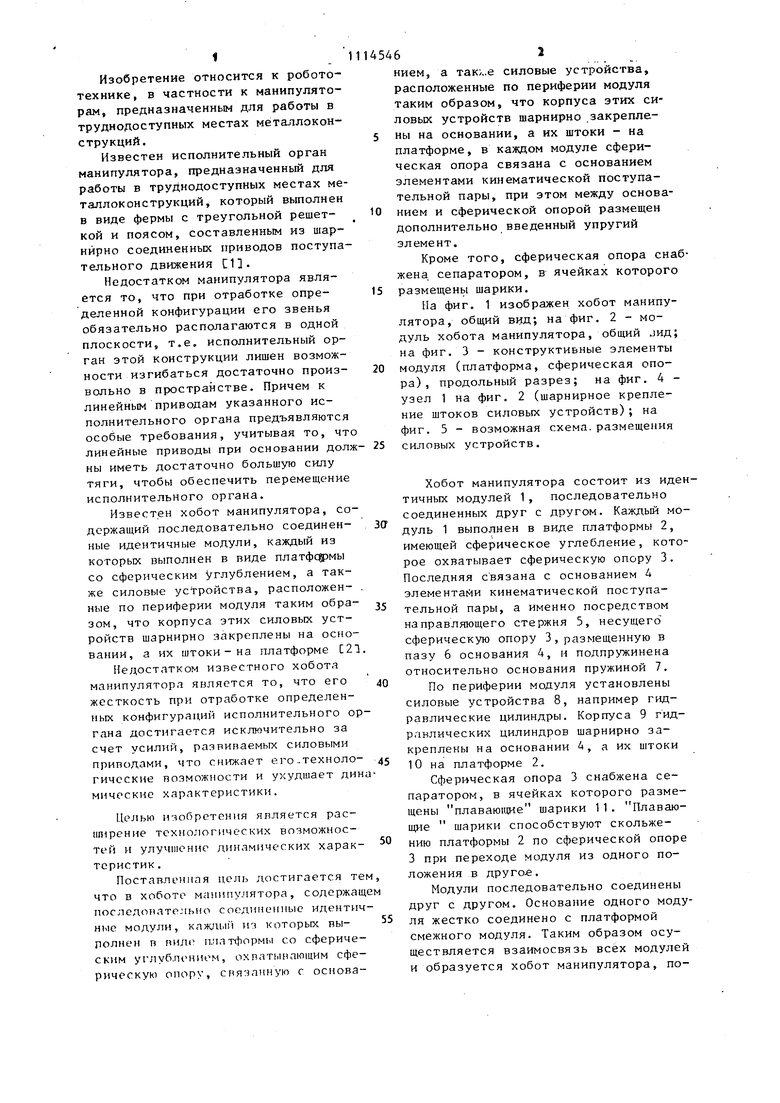
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1984 |
|
SU1227457A1 |
| Манипулятор | 1984 |
|
SU1220780A1 |
| МОБИЛЬНЫЙ ПЕРЕНОСНОЙ КОПЕР | 2000 |
|
RU2203359C2 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| МАНИПУЛЯТОР | 1994 |
|
RU2073602C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Робот-манипулятор | 2024 |
|
RU2833264C1 |
| СИСТЕМА ИМИТАЦИИ АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ПОЛУНАТУРНОГО МОДЕЛИРУЮЩЕГО КОМПЛЕКСА ЭРГОНОМИЧЕСКОГО ПРОЕКТИРОВАНИЯ | 2024 |
|
RU2834755C1 |
| СБОРОЧНАЯ ГОЛОВКА | 1992 |
|
RU2035285C1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
1. ХОБОТ МАНИПУЛЯТОРА, содержащий последовательно соединенные идентичные модули, каждый из которых выполнен в виде платформы со сферическим углублением, охватывающим сферическую опору, связанную с основанием, а также силовые устройства, расположенные по периферии модуля таким образом, что кор-. пуса этих силовых устройств шарнирно закреплены на основании, а их .штоки - на платформе, отличающийся тем, что, с целью расширения технологических возможностей и улучшения динамических характеристик, в каждом модуле сферическая опора связана с основанием элементами кинематической поступательной пары, при этом между основанием и сферической опорой размещен дополнительно введенный упругий элемент. 2. Хобот манипулятора по п. 1, отличающий с я тем, что еферическая опора снабжена- сепаратором,в ячейках которого размещены шарики.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU889417A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент Великобритании № 1148365, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
