1
Изобретение относится к робототехнике, в частности к манипуляторам, предназначенным для работы в трудоноступных местах, характеризующихся узкими искривленными пространствами, например для выполнения окрасочных операций сложных внутренних полостей объектов.
Цель изобретения ,- расширение функциональных возможностей за счет обеспечения предварительно заданной последовательности работы модулей.
На фиг. 1 изображено исполнительное устройство промышленного робота, общий вид5 на фиг. 2 - сечение А-А на фиг. 1 на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2.
Исполнительное устройство промьш- ленного робота содержит основание 1, установленные на нем идентичные модули 2, последовательно соединенные между собой. Каждьй модуль выполнен в виде сферических сегментов 3, закрепленных на фланцах 4 и контактирующих между собой по сферическим поверхностям.
На фла нцах выполнены отверстия 5-8, через которые проходят основные гибкие тяги 9 и 10, жестко закрепленные на фланце 11 последнего от основания 1 модуля 2 и жестко связанные с соответствующими шкивами 12 и 13 основных приводов 14 и 15, установленных на основании 1.
Кроме того, на фланцах 4 и 11 выполнены отверстия 16-19, через которые проходят дополнительные гибкие тяги 20 и 21 дополнительной приводной гибкой замкнутой передачи, ополнительные приводы 22 н 23, которой с соответствующими щкивами 24 и 25 установлены на основании 1. ополнительные блоки 26 и 27 гибкой передачи расположены на фланце 11 последнего от основания 1 модуля 2 во взаимно перпендикулярных плоскостях соответственно шкивам 24 и 25 ополнительных приводов 22 и 23. ополнительная гибкая тяга 20 огибает шкив 24 и блок 26, а дополнительная гибкая тяга 21 огибает кив 25 и блок 27.
На каждом модуле установлен мехаизм фиксации дополнительных гибких яг относительно фланцев модулей, ыполненный в виде электромагнитноо привода 28,.расположенного на ланце 4, сердечник 29 которого ки1202852
0
5
0
5
0
5
0
5
0
5
нематически связан посредством, Например, шарнирно-ползунного механизма 30 с поворотным элементом 31, 1меющим круговые пазы. Тормозные к олодки 32-35 жестко закреплены на фланце 4 и входят в круговой паз поворотного элемента 31. Тормозные колодки 36-39 установлены подпружи- ненно посредством соответствующих упругих элементов, например пружин 40-43, относительно круговых пазов поворотного элемента 31.
Исполнительное устройство промьш jленного робота работает следующим
образом.
На механизмы фиксации дополнительных, гибких тяг, установленные на фланце Г , подается сигнал от системы управления (не показана) и на этом фланце фиксируются дополнительные гибкие тяги 20 и 21. В этом случае все модули 2 ниже фланца Г перемещаются от дополнительных приводов 22 и 23 через шкивы 24 и 25 и дополнительные гибкие тяги 20 и 21. А все модули 2 вьпие фланца Г перемещаются от основных приводов 14 и 15 через шкивы 12 и 13 и основ- .ные гибкие тяги 9 и 10, жестко закрепленные на фланце 11 последнего модуля 2. Дополнительные гибкие тяги 20 и 21, проходящие вьше фланца Г , не заклинивают работу исполнительного устройства, так как они образуют замкнутую гибкую передачу, охватывая дополнительные блоки 26 и 27.
В результате получено исполнительное устройство, состоящее из двух гибких, независимо работающих участков. Длина первого участка - от первого модуля до фланца Г , длина второго участка - от фланца Г до последнего модуля. Менять длины автономно раб отающик участков можно произвольно. Независимость работы участков не означает независимость работы двигателей. При изменении конфигурации участка, лежащего ниже фланца Г , за счет дополнительных приводов 22 и 23 и дополнительных гибких тяг 20 и 21, изменяется длина обеих ветвей основных гибких тяг 9 и 10. Перераспределение их натяжения осуществ-. ляется за счет соответствующего дово- рота основных приводов 14 и 15. Углы доворота рассчитьшаются по простым геометрическим соотношениям, регулируемым системой программного управления.
. ,
Если подать сигнал на механизьй фиксации дополнительных гибких тяг, установленные на фланцах р и Е , и зафиксировать дополнительные гибкие тяги 20 и 21, то все модули 2 ниже фланцаD перемещаются от дополнителных приводов 22 и 23 посредством дополнительных гибких тяг 20 и 21 , а все модули выше фланца t - от основных приводов 14 и 15 посредством основных гибких тяг 9 и 10. Мо- :дули 2 на участке от фланца Г до фланца Е неподвижны и повышают жесткость всей конструкции. Фиксирование дополнительных гибких тяг на фланцах D и Е модулей может происходить при произвольной конфигура ции всего исполнительного устройства. Поэтому зафиксированньй (жесткий) участок БЕ исполнительного устройства может иметь как прямолинейную конфигурацию, так и криволинейную, произвольно ориентированную в пространстве. Таким образом, вся длина исполнительного устройства промышленного робота программно (от системы управления) может быть разбита на три участка: средний - жесткий и два крайних, независимо управляемых от систе мы управления.
Механизм фиксации дополнительных гибких тяг относительно фланцев модулей работает следующим образом.
02852
На электромагнитный привод 28 подан электрический сигнал. Посту- пательное движение сердечника 29 через шарнирно-ползунный механизм
5 30 приводит в действие поворотньй элемент 31. Поворотный элемент 31 начинает перемещаться относительно фланца 4. Тормозные колодки 36-39, прикрепленные через упругие элемен10 ты, например пружины 40-43, к поворотному элементу 31, прижимают соответствующие дополнительные гибкие тяги 20 и 21 к тормозным колодкам 32-35, закрепленным на фланце 4.
15 Происходит фиксация дополнительных гибких тяг 20 и 21. При этом, если обеспечить независимость работы механизмов фиксации дополнительных гибких тяг 20 и 21 и основных гиб20. ких тяг 9 и 10, то функциональные возможности исполнительного устройства промьгашенного робота еще более расширятся. В частности, если зафиксировать основную гибкую тягу 10
25 и дополнительную гибкую тягу 21, а основную гибкую тягу 9 и допсшни- тельную гибкую тягу 20 не фиксировать относительно фланца, то жесткость участка в двух взаимно перпен30 дикулярных направлениях существен но различается, что необходимо при взаимодействии с обрабатываемыми объектами, например при шлифовании и зачистке деталей.
г
1
33
«/ . w
f
«J
i/r./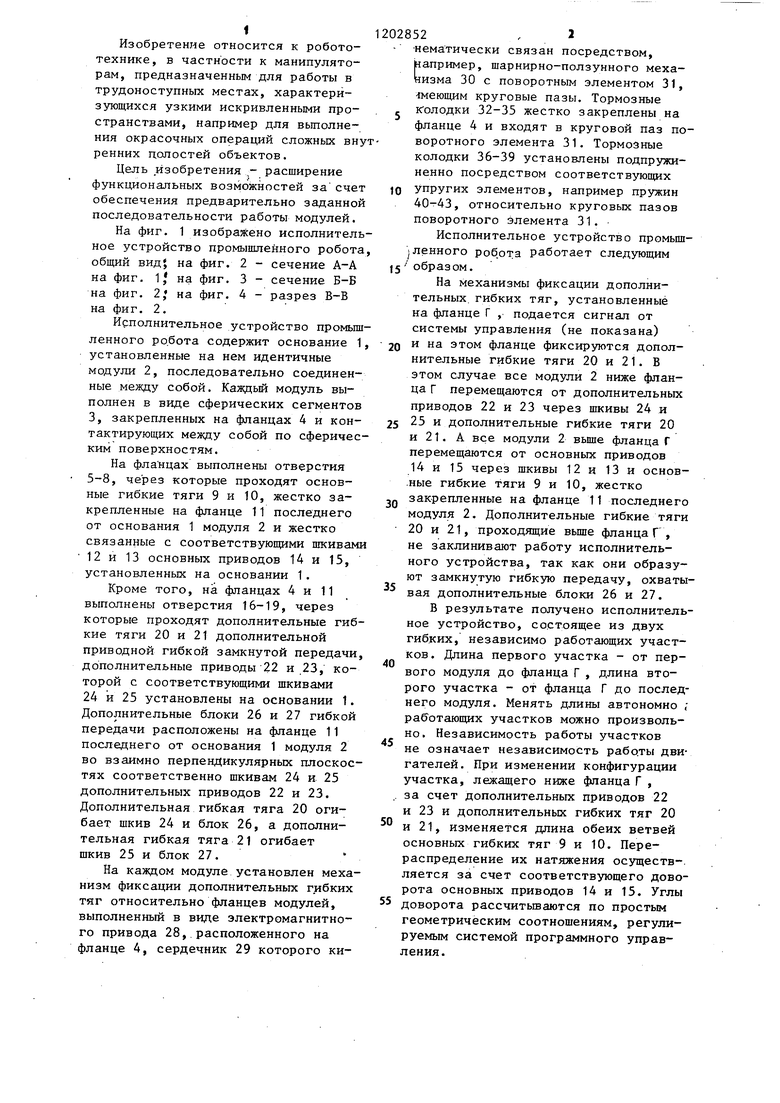
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительное устройство промышленного робота | 1985 |
|
SU1256954A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 1991 |
|
RU2017647C1 |
| Исполнительное устройство манипулятора | 1984 |
|
SU1225779A1 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2008 |
|
RU2392145C1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ЭЛЕКТРОННОЙ ТЕХНИКИ ИЗ СТОПЫ | 2001 |
|
RU2209534C2 |
| Чертежный станок | 1986 |
|
SU1553043A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Устройство для размотки рулонного материала | 1986 |
|
SU1315373A1 |
Редактор A.Сабо
Составитель И.Бакулина
Техред О.НецеКорректор А.Обручар
Заказ 8365/18 Тираж 1049Подписное
, ВНИИПИ Государственного,комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ШШ Патент, г. Ужгород, ул. Проектная, 4
| ФИКСАТОР ДЛЯ КОЛЕСА РОЛИКОВОГО ТИПА С ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМИ ОСЯМИ ВРАЩЕНИЯ | 1972 |
|
SU419421A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| опублик | |||
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
