1133
Изобретение относится к робототехнике, в частности к манипуляторам, предназначенным для работы в труднодоступных местах, характеризую1дихся узкими искривленными пространствами.
Целью изобретения является повышение точности манипулятора и упрощение алгоритма работы системы управления.
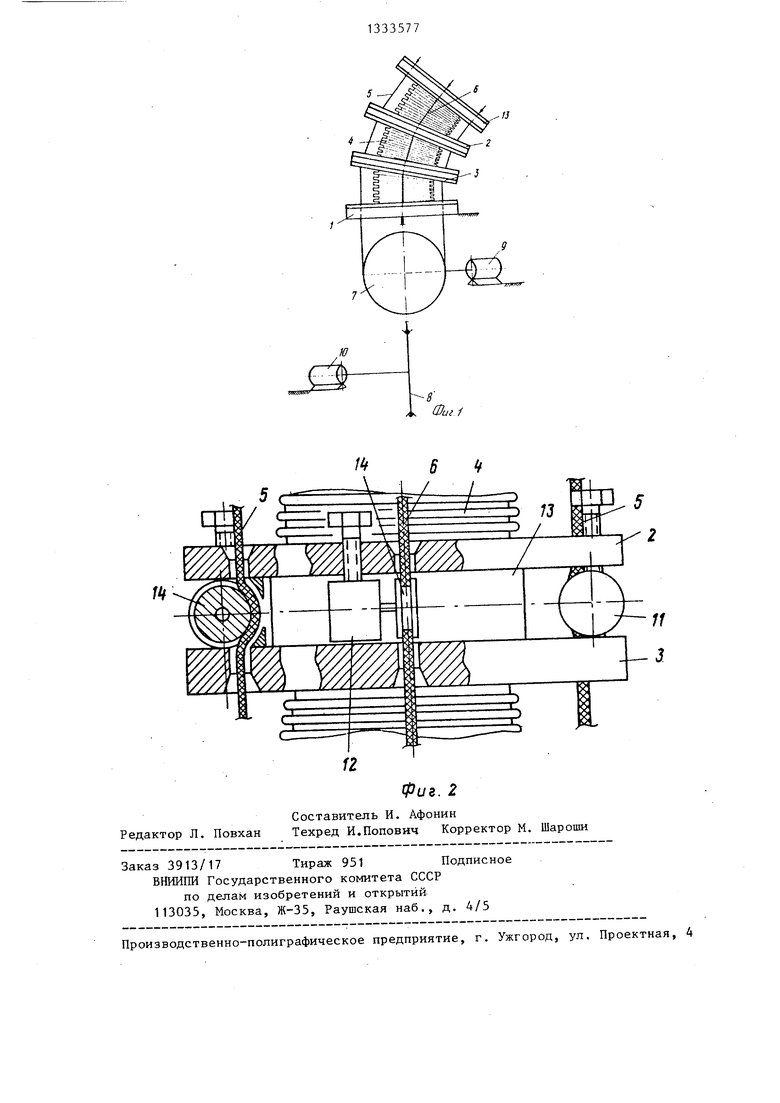
На фиг.1 представлено звено исполнительного устройства, общий вид на фиг.2 - соединение датчиков исполнительных положений фланца с приводными элементами, вариант.
Исполнительное устройство 1 (фиг. (фиг.1) выполнено в виде упругого хоботообразного звена, состоящего из последовательности одинаковых модулей. Каждый модуль выполнен в виде двух фланцев 2 и 3, соединенньк меж,цу собой упругим элементом 4, и гибких приводных элементов 5 и 6, выполнен
ных, например, в виде тросов. Приводные элементы одним концом жестко закреплены на фланце последнего от основания модуля, а другим прикреплены к валам 7 и 8 соответствующих управляющих двигателей 9 и 10. На каждом модуле установлены датчики 11 и 12 относительных положений фланцев (фиг.2).
Датчики относительных положений, выполненные, например в виде круговых
водные элементы расположены в отверспотен-циометров, установлены в простав- ходными валами соответствующих управке 13 между фланцами 2 и 3 двух сосед- ляюищх двигателей, причем гибкие приних модулей. Приводные элементы 5
и 6 кинематически связаны с входными
валами 14 круговых потенцииометров 1 1
40
и 12.
Исполнительное устройство работает следующим образом.
Пусть под действием управляющих сигналов на двигатели 9 и 10 наматываются приводные элементы 5 и 6 и каждьш модуль устройства меняет свою конфигурацию, т.е. фланцы 2 меняют свое положение относительно фланцев
45
тиях, выполненных во фланцах, о т - личающе вся тем, что, с целью повышения точности позиционирования и упрощения алгоритма работы системы управления, каждый модуль снабжен датчикам относительного положения фланцев, прт1чем каждый из датчико кинематически связан с соответствую- 11ЩМ гибким приводным элементом, а выходы датчиков подключены к блоку обработки инфopмaI: и.
3, Датчики 11 и 12 относительных положений фланцев отслеживают эти изменения и выдают соответствующие сигналы
в систему управления.
Изменение относительного положения фланца 2 относительно фланца 3 происходит вследствие изменения длин приводных элементов 5 и 6 в каждом модуле. Сигналы с потенциометров, зависящие от длин выбранных тросов 5 и 6 для каждого модуля, поступают в блок обработки информации (на чертеже не показан) . Информация об изменении длин
тросов для каждого модуля позволяет определить с высокой точностью положение исполнительного устройства всей манипуляционной системы, при этом учитывается влияние всех действующих на устройство сил - тяжести, трения и т.д.
Формула изобретения
Исполнительное устройство промышленного робота, выполненное в виде упругого хоботообразного звена и состоящее из последовательно соединенных модулей, каждый из которых состоит из
двух фланцев, соединенных между собой упругим элементом, и гибких приводных элементов, одни концы которых закреплены на последнем фланде конечного модуля, а другие концы соединены с выводные элементы расположены в отверс
тиях, выполненных во фланцах, о т - личающе вся тем, что, с целью повышения точности позиционирования и упрощения алгоритма работы системы управления, каждый модуль снабжен датчикам относительного положения фланцев, прт1чем каждый из датчиков кинематически связан с соответствую- 11ЩМ гибким приводным элементом, а выходы датчиков подключены к блоку обработки инфopмaI: и.
/J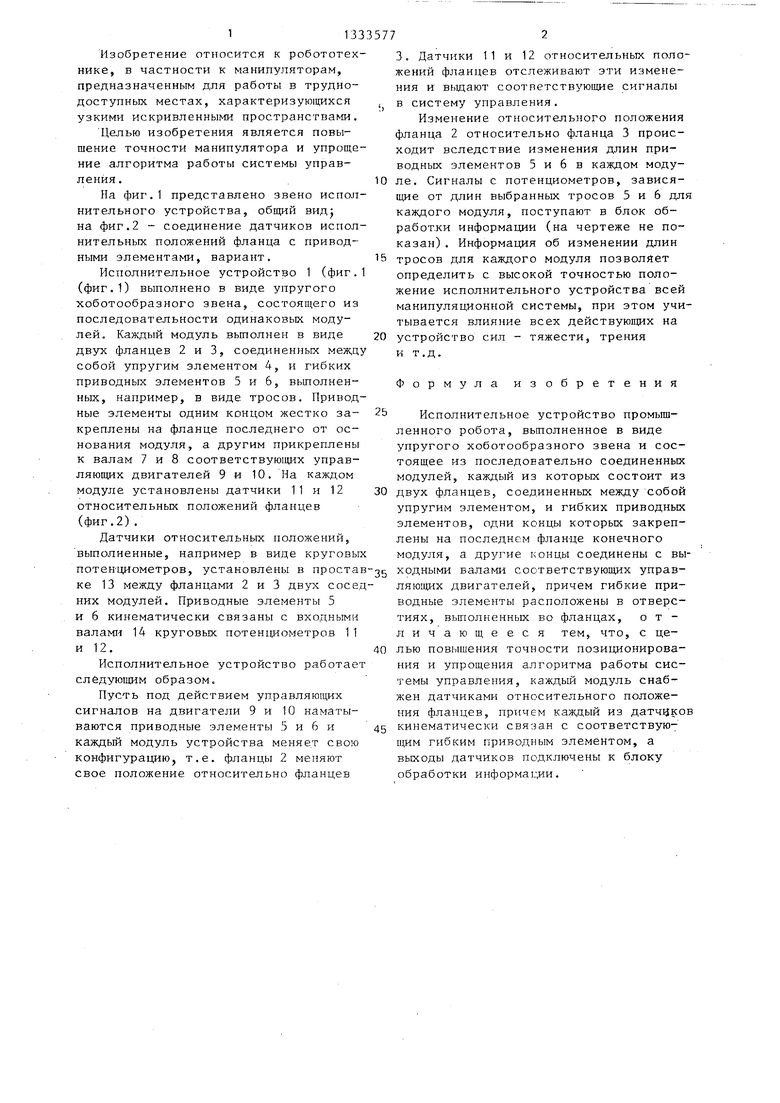
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительное устройство промышленного робота | 1984 |
|
SU1184666A1 |
| Сервисный мобильный робот и комплект монтируемых на обслуживаемых объектах устройств для обмена сменными модулями и жидкими материалами | 2023 |
|
RU2840834C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Исполнительное устройство промышленного робота | 1985 |
|
SU1256954A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Исполнительное устройство промышленного робота | 1985 |
|
SU1301701A1 |
| Структурно-гибкая производственная система | 1990 |
|
SU1775272A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
Изобретение относится к робототехнике. Цель изобретения - повьшение точности позиционирования и упрощение системы управления. Для этого в исполнительное устройство промышленного робота, представляющее собой упругое хоботообразное звено, состоящее из одинаковых модулей, каждый из которых выполнен в виде двух. (Ьланцев, соединенных между собой упругим элементом, и гибких приводных элементов, устанавливаются датчики относительных положений фланцев, выполненные, например, в виде круговых потенциометров. Каждый из датчиков кинематически связан с соответствующим гибким приводным элементом, а выходы датчиков подключены к блоку обработки информации. 2 ил. 00 00 со СД 
Фи. 2
Составитель И. Афонин Редактор Л. Повхан Техред И.Попович Корректор М. Шароши
- - --- - - - - --- - - - ----.- - -. - - - -- - - . „
Заказ 3913/17 Тираж 951 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| ФИКСАТОР ДЛЯ КОЛЕСА РОЛИКОВОГО ТИПА С ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМИ ОСЯМИ ВРАЩЕНИЯ | 1972 |
|
SU419421A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
