2. Устройство по п. 1, о т л и чающееся тем, что оно снабжено механизмом стопорения, выполненным в виде концентрично закрепленного снаружи корпуса опорного диска, размещенного параллельно ему тормозного диска, подпружиненного относительно опорного диска и расположенного по отношению к нему подвижно в осевом направлении на осях, эксцентрично установленных в опорном 11 9 диске, рычажного стопора, шарнирно закрепленного на опорном диске с опорой одним концом рычага в тормозной диск, а другим концом - в зубчатую Передачу при стопорении механизма радиального перемещения зонда, а также фиксатора в виде подпружиненного штока с независимым приводом , взаимодействующего с тормозным диском при освобождении стопора.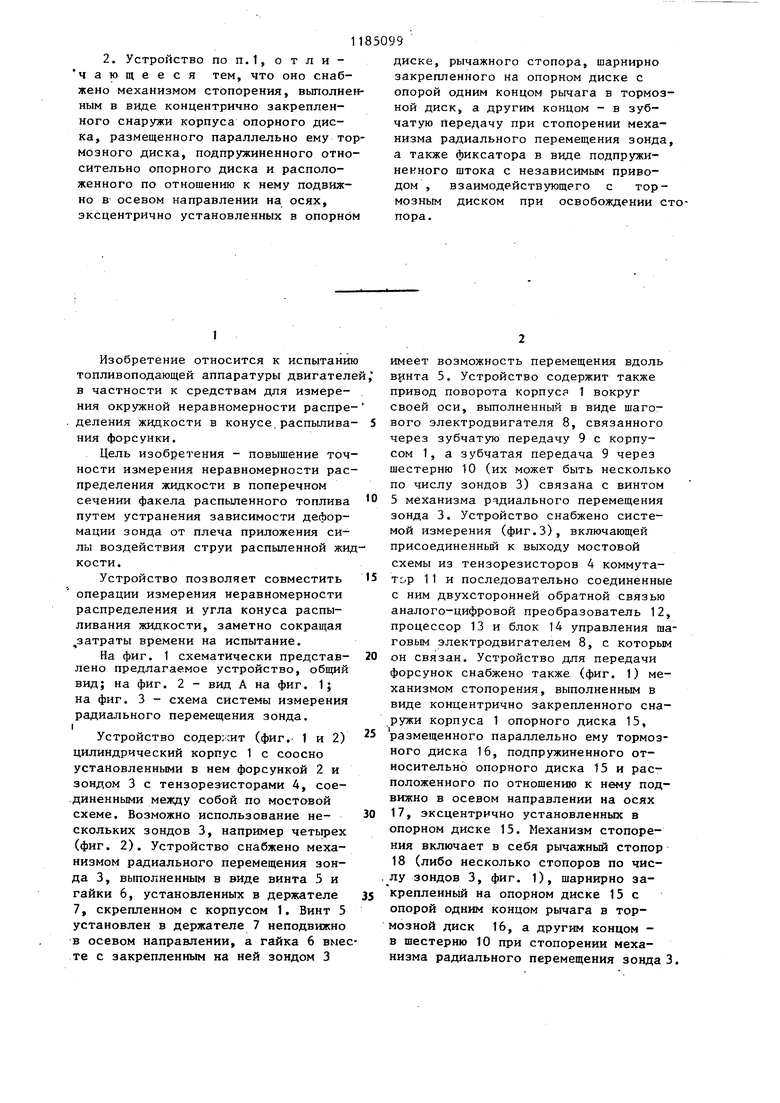
| название | год | авторы | номер документа |
|---|---|---|---|
| Дыропробивной револьверный пресс | 1985 |
|
SU1286360A1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| ПРИВОД ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2339858C2 |
| УНИВЕРСАЛЬНЫЙ ПРИВОД ПЛАШЕЧНОГО ПРЕВЕНТОРА-2 | 1993 |
|
RU2097527C1 |
| УСТРОЙСТВО ДЛЯ СТОПОРЕНИЯ | 2003 |
|
RU2235958C1 |
| Гидравлический тормоз | 1988 |
|
SU1649159A1 |
| Устройство для намотки магнитопровода | 1990 |
|
SU1835095A3 |
| Прокатный стан | 1988 |
|
SU1547889A1 |
| Винтовой пресс | 1989 |
|
SU1646892A1 |
1. УСТРОЙСТВО .ЦЛЯ ИСПЫТАНИЯ ФОРСУНОК, содержащее цилиндрический корпус с соосно установленной в нем форсункой, привод поворота корпуса вокруг его оси и связанный с корпусом зонд с тензорезисторами, соединенными между собой по мостовой схеме, связанной с системой измерения, отличающееся тем, что, с целью повышения точности измерения неравномерности распределения жидкости в поперечном сечении факела распыленного топлива, устройство снабжено механизмом радиального перемещения зонда, выполненным в виде связанного с приводом поворота корпуса винта и гайки, установленных в скрепленном с корпусом держателя с возможностью перемещения гайки по неподвижному в осевом направлении винту, на которой закреплен зонд с тензорезисторами, привод поворота корпуса выполнен в виде шагового электродвигателя, связанного через зубчатую передачу с корпусом, а система измерения выполнена в виде присоединенного к выходу мосS товой схемы коммутатора и последовательно соединенных с ним двухсто(Л ронней обратной связью аналого-цифрового преобразователя, процессора, блока управления шаговым электродвигателем и шагового электродвигателя. ЭО СП ;о
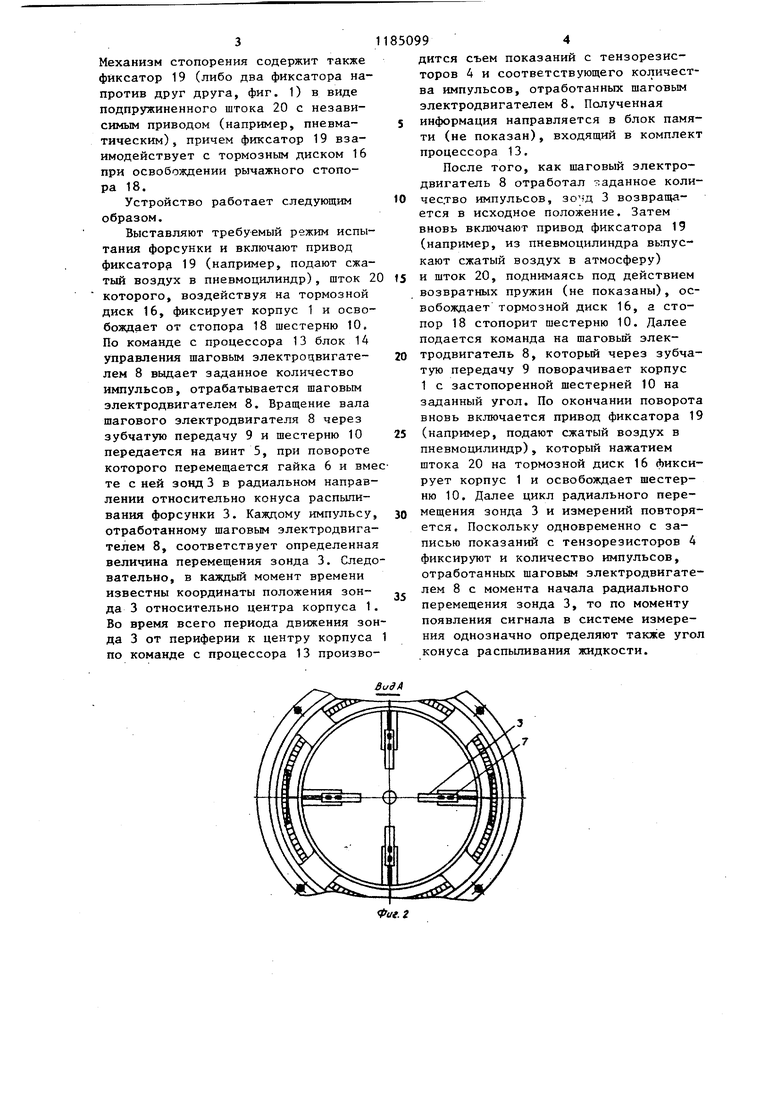
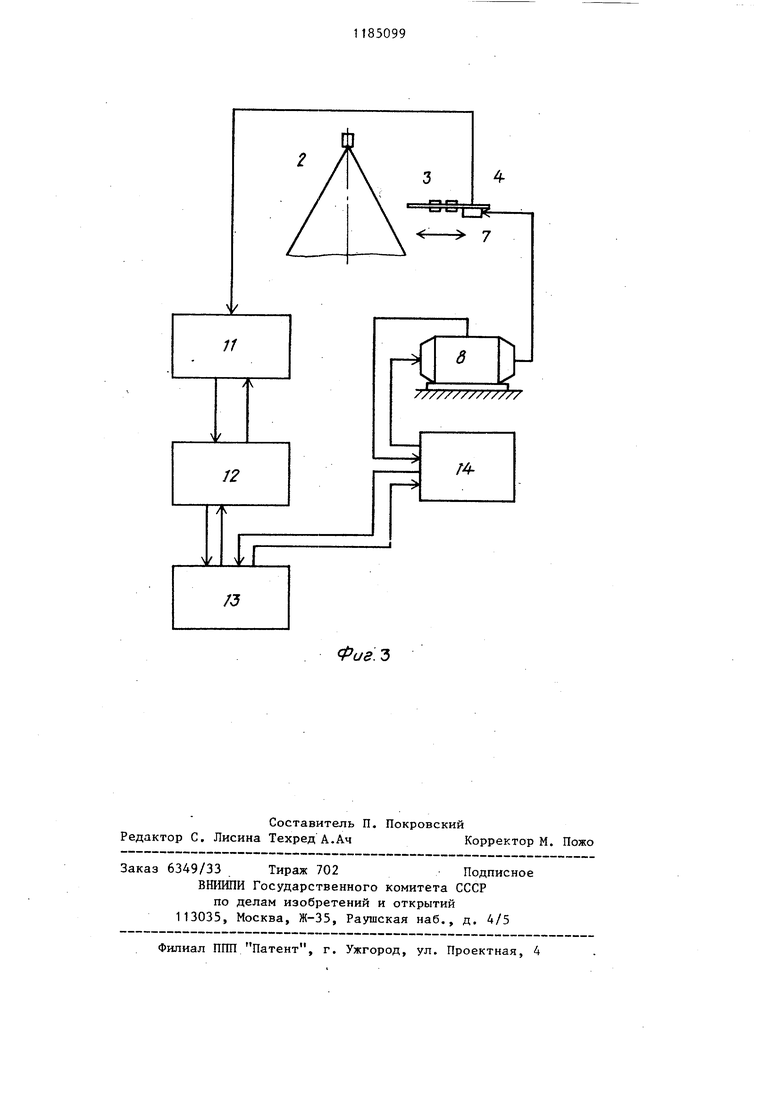
Изобретение относится к испытанию топливоподающей аппаратуры двигател в частности к средствам для измерения окружной неравномерности распре деления жидкости в конусе,распылива ния форсунки. Цель изобретения - повышение точ ности измерения неравномерности рас пределения жидкости в поперечном сечении факела распыленного топлива путем устранения зависимости деформации зонда от плеча приложения силы воздействия струи распыленной жид кости. Устройство позволяет совместить операции измерения неравномерности распределения и угла конуса распыливания жидкости, заметно сокращая затраты времени на испытание. На фиг. 1 схематически представлено предлагаемое устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - схема системы измерения радиального перемещения зонда. Устройство содер;-сит (фиг,- 1 и 2) цилиндрический корпус 1 с соосно установленными в нем форсункой 2 и зондом 3 с тензорезисторами 4, сое.диненными между собой по мостовой схеме. Возможно использование нескольких зондов 3, например четьфех (фиг, 2), Устройство снабжено механизмом радиального перемещения зонда 3, выполненным в виде винта 5 и гайки 6, установленных в держателе 7, скрепленном с корпусом 1, Винт 5 установлен в держателе 7 неподвижно в осевом направлении, а гайка 6 вмес те с закрепленным на ней зондом 3 имеет возможность перемещения вдоль винта 5. Устройство содержит также привод поворота корпус 1 вокруг своей оси, вьшолненный в виде шагового электродвигателя 8, связанного через зубчатую передачу 9 с корпусом 1, а зубчатая передача 9 через шестерню 10 (их может быть несколько по числу зондов 3) связана с винтом 5 механизма радиального перемещения зонда 3, Устройство снабжено системой измерения (фиг.З), включающей присоединенный к выходу мостовой схемы из тензорезисторов 4 коммутатор 11 и последовательно соединенные с ним двухсторонней обратной связью аналого-цифровой преобразователь 12, процессор 13 и блок 14 управления шаговым электродвигателем 8, с которым он связан. Устройство для передачи форсунок снабжено также (фиг. 1) механизмом стопорения, выполненным в виде концентрично з акрепленного снаружи корпуса 1 опорного диска 15, размещенного параллельно ему тормозного диска 16, подпружиненного относительно опорного диска 15 и расположенного по отношению к нему подвижно в осевом направлении на осях 17, эксцентрично установленных в опорном диске 15. Механизм стопорения включает в себя рычажный стопор 18 (либо несколько стопоров по числу зондов 3, фиг. 1), шарнирно закрепленный на опорном диске 15с опорой одним концом рычага в тормозной диск 16, а другим концом в шестерню 10 при стопорении механизма радиального перемещения зонда 3, 3 Механизм стопорения содержит также фиксатор 19 (либо два фиксатора напротив друг друга, фиг. 1) в виде подпружиненного штока 20 с независимым приводом (например, пневматическим), причем фиксатор 19 взаимодействует с тормозным диском 16 при освобождении рычажного стопора 18. Устройство работает следующим образом. Выставляют требуемый режим испытания форсунки и включают привод фиксатору 19 (например, подают сжатый воздух в пневмоцилиндр), шток 2 которого, воздействуя на тормозной диск 16, фиксирует корпус 1 и освобождает от стопора 18 шестерню 10, По команде с процессора 13 блок 14 управления шаговым злектроцвигателем 8 выдает заданное количество импульсов, отрабатывается шаговым электродвигателем 8. Вращение вала шагового электродвигателя 8 через зубчатую передачу 9 и шестерню 10 передается на винт 5, при повороте которого перемещается гайка 6 и вме те с ней зонд 3 в радиальном направлении относительно конуса распыпивания форсунки 3. Каждому импульсу отработанному шаговым электродвигателем 8, соответствует определенная величина перемещения зонда 3. Следо вательно, в каждый момент времени известны координаты положения зонда 3 относительно центра корпуса 1 Во время всего периода движения зон да 3 от периферии к центру корпуса по команде с процессора 13 произвоВидА94 дится съем показаний с тензорезисторов 4 и соответствующего количества импульсов, отработанных шаговым электродвигателем 8. Полученная информация направляется в блок памяти (не показан), входящий в комплект процессора 13. После того, как шаговый электродвигатель 8 отработал аданное количество импульсов, зо:д 3 возвращается в исходное положение. Затем вновь включают привод фиксатора 19 (например, из пневмоцилиндра выпус- кают сжатый воздух в атмосферу) и шток 20, поднимаясь под действием возвратных пружин (не показаны), освобождает тормозной диск 16, а стопор 18 стопорит шестерню 10. Далее подается команда на шаговый электродвигатель 8, который через зубчатую передачу 9 поворачивает корпус 1 с застопоренной шестерней 10 на заданный угол. По окончании поворота вновь включается привод фиксатора 19 (например, подают сжатый воздух в пневмоцилиндр), который нажатием штока 20 на тормозной диск 16 фиксирует корпус 1 и освобождает шестерню 10. Далее цикл радиального перемещения зонда 3 и измерений повторяется. Поскольку одновременно с записью показаний с тензорезисторов 4 фиксируют и количество импульсов, отработанных шаговым электродвигателем 8 с момента начала радиального перемещения зонда 3, то по моменту появления сигнала в системе измерения однозначно определяют также угол конуса распыливания жидкости.
| СПОСОБ РЕМОНТА ОСНОВАНИЯ ВЕРТИКАЛЬНЫХ МЕТАЛЛИЧЕСКИХ РЕЗЕРВУАРОВ ДЛЯ НЕФТЕПРОДУКТОВ И НЕФТИ | 2021 |
|
RU2756591C1 |
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Промывной клапан для туалетов и т.п. приборов | 1925 |
|
SU1953A1 |
