1
Изобретение относится к области мапгиноагрегатостроения и может быть нспользовано в качестве позиционного привода промышленных манипуляторов и других гидрофицированных исполнительных устройств технологического и специального оборудования.
Цель изобретения - расширение функциональных возможностей путем воения количества рабочих дискрет при обеспечении значения младшей дискреты минимально требуемой в личины.
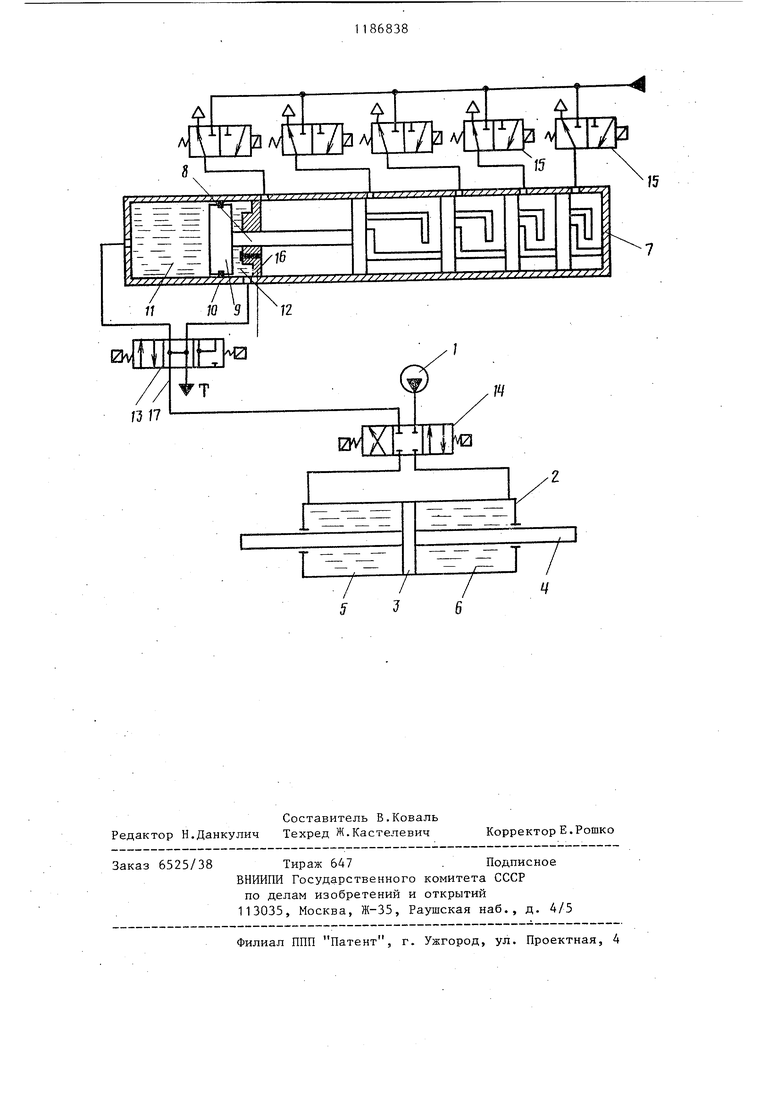
На чертеже представлена принципиальная гидравлическая схема привода.
ПнеВМСгидравлический позиционны привод содержит источник 1 питания исполнительный гидроцилиндр 2 с установленньм в нем поршнем 3 с двусторонним штоком 4 с образованием рабочих полостей 5 и 6,пневмогидраплический цифровой преобразователь, включающий цифровой пневмоцилиндр 7, шток 8 которого жестко связан с поршнем 9, установленным в гидрокамере 10 с образованием поршневой 11 и штоковой 12 полостей, управляющий гидроаппарат, выполненный в виде четырехлинейного трехпозиционного гидрораспределителя 13 с электромагнитным управлением, обеспечивающий в нейтральной позиции одновременное подключение поршневой 11 и штоковой 12 полостей к сливу, в одной из кр них позиций - подключение поршневой полости 11 к одной из рабочих полостей 5 и 6 через направляющий четырехлинейньш гидрораспределитель 14 с электромагнитным управлением, штоковой полости 12 - непосредственно к сливу, а в дополнительной крайней позиции - одновременное подключение одной из рабочей полостей 5 и 6 к поршневой 11 и штоковой 12 полостям. Цифровой пневмоцилиндр 7 управляется от пневмораспределителя 15. В штокову полость 12 гидрокамеры 10 выведено устройство 16 фиксирования исходного состояния пневмогидравлического цифрового преобразователя. Гидрораспределитель 13 линией 17 подключен к направляющему гидро.распределителю 14.
Привод работает следующим образом.
868382
В исходном положении поршень 9 взаимодействует с устройством 16. При подаче команды на один или несколько пневмораспределителей 15 цифрового пневмопривода 7 шток последнего и вместе с ним поршень 9 перемещается на заданное расстояние , вытесняя соответствующий объем жидкости из поршневой полосJQ ти 11 в штоковую ПОЛОСТЬ 12, а излишек, определяемьй объемом, занимаемым штоком 8, - на слив. Гидрораспределители 13 и 14 находятся в нейтральном положении. После срабатыва.« ния цифрового пневмоцилиндра 7 переключается гидрораспределитель 14 в одну из крайних позиций в зависимости от нужного направления движения штока 4.
.- Величина перемещения штока 4 будет зависеть от величины перемещения поршня 9 и положения гидрораспределителя 13. При переключении гидрораспределителя 13 в крайнюю,
jc левую по чертежу позицию, жидкость из рабочей полости, например 5, поступает в поршневую полость 11, возвращая поршень 11 и вместе с ним шток 8 пневмоцилиндра 7 в исходное положение, регистрация которого
происходит устройством 16, при срабатывании которого гидрораспределитель 14 переключается в нейтральное положение. Жидкость из штоковой полости 12 поступает на слив.
Выходной шток 4 гидроцилиндра 1 при этом положении гидрораспределителя 13 переместится на расстояние, пропорциональное текущему значению объема поршневой полости,
после отработки входного сигнала пневмоцилиндром 7.
При переключении гидрораспределителя 13 в крайнюю, правую по чертежу позицию, при той же позиции
гидрораспределителя 14 жидкость из рабочей полости 5 поступает одновременно в поршневую 11 и штоковую 12 полости.
При этом перемещение штока 4
при- том же входном сигнале на пневмораспределителе 15 будет меньше на величину, пропорциональную текущему значению объема штоковой полости 12.
Таким образом, осуществляется два ряда дискретных положений штока 4 исполнительного гидроцилиндра 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический цифровой позиционный привод | 1981 |
|
SU1021827A1 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906665A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906664A1 |
| Пневмогидравлический привод | 1983 |
|
SU1114821A2 |
| Позиционный привод | 1989 |
|
SU1710870A1 |
| Пневмоэлектрогидравлический следящий позиционный привод подачи инструмента | 1974 |
|
SU488450A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ СТВОРОК РАЗДВИЖНОЙ ЧАСТИ КРОВЛИ СТАДИОНА | 2014 |
|
RU2556098C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕССА | 2003 |
|
RU2250828C1 |
| Рекуперативный гидропривод лесовозного автомобиля с прицепом | 2023 |
|
RU2810823C1 |
ПНЕВМОГВДРАВЛИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД, содержащий источник питания, исполнительный, гидроцилиндр с рабочими полостями,пневмогидравлический цифровой преобразователь, включающий цифровой пневмоцилиндр, шток которого связан с поршнем, установленным в гидрокамере с образо ванием поршневой и щтоковой-полостей, сообщающихся между собой и со сливом через управляющий гидроаппарат, выполненный с возможностью одновременного сообщения обеих полостей гидрокамеры со сливом, и направляющий четырехлинейный гидрораспределитель, подключенный к рабочим полостям, к источнику питания и через управляющий гидроаппарат к поршневой полости гидрокамеры, отличающийся тем, что, с целью расширения функциональных возможностей путем удвоения количества рабочих дискрет при обеспечении значения младшей дискреты минимально i требуемой величины, управляющий гидроаппарат выполнен в виде четы(Л рехлинейного трехпозиционного гидрораспределителя, подключенного одной из линий к направляющему гидрораспределителю и выполненному с возможностью подключения одной из рабочих полостей исполнительного гидроцилиндра одновременно к порш00 невой и штоковой полостям гидрокаоч меры. 00
| Пневмогидравлический цифровой позиционный привод | 1981 |
|
SU1021827A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
