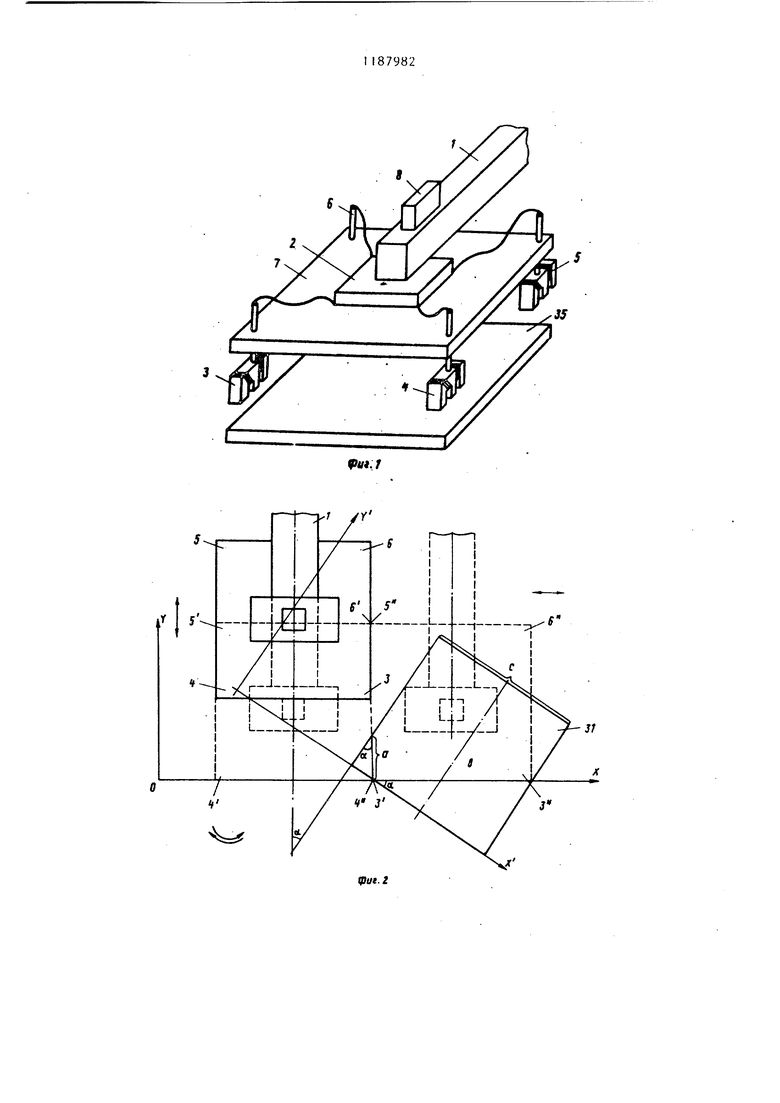
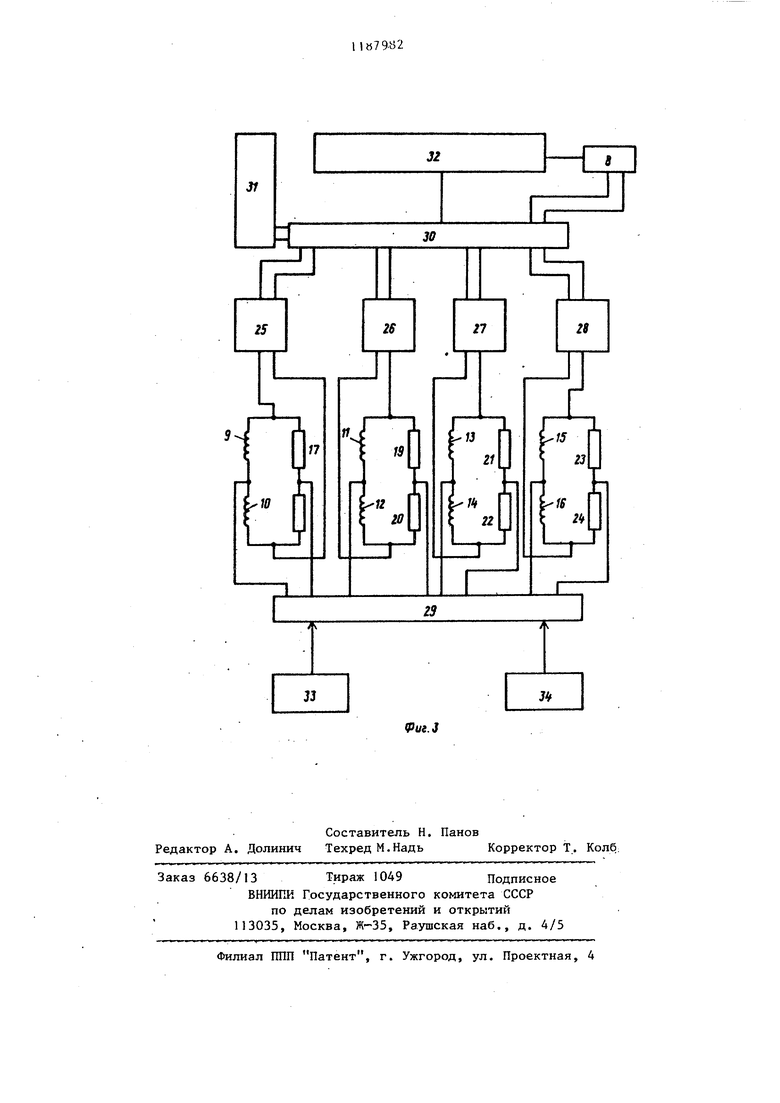
Изобретение относится к манипуляторостроению и может быть использова но для автоматического поиска и захвата ферромагнитных деталей и является усовершенствованием извест- ного манипулятора по авт.св. № 996183. Цель изобретения - расширение тех нологических возможностей манипулятора за счет обеспечения центрирова- ния схвата манипулятора относительно захватываемого объекта. На фиг. 1 Дан манипулятор, общий вид; на фиг. 2 - схема центрированного захвата детали; на фиг. 3 - структурная схема управления и питания манипулятора. Рука 1 манипулятора соединена через узел 2 поворота со схватом, -содержащим четыре Ш-образных сердечни- ка 3-6, закрепленных на плите 7 на нижней ее поверхности по углам. Плита 7 выполнена из дюралюминия для уменьшения веса манипулятора и нагрузки на руку 1. Датчик 8 угла поворота закреплен на руке. На ка;адом из Ш-образных сердечников расположены обмотки 9-16. Обмотки каждого сер дечника соединены с соответствующей парой резисторов 17-24 по мостовой схеме, одни диагонали этих схем подключены к соответствующим входам блоков 25-28 сравнения, а другие под ключены к блоку 29 коммутации. Ко входам вычислительного блока 30 подключены выходы блоков сравнения, счетчик 31 времени и датчик 8 угла поворота. Выход вычислительного блока соединен со входом системы 32 управления, соединенной с датчиком 8 угла поворота. Источники постоянного 33 и переменного 34 тока через блок коммутации подключены к диагоналям каждой из мостовых схем. Манипулятор работает следующим об разом. Рука 1 со схватом осуществляет поисковое движение. В общем случае ось объекта 35 расположена под углом ( к оси манипулятора. При помощи блока 29 коммутации источник 34 переменного тока подключается к обмоткам 9-16. Как только Ш-образный сердечник 3 или 4 (фиг. 2) будет подходить к объекту, сигнал на выходе бло ков 25 или 26 сравнения будет максимальным. Сигнал поступает в вычислительный блок 30, и в блоке 31 начина ется отсчет времени. Рука со схватом движется с постоянной скоростью. Через некоторое время весь сердечник будет над деталью, и сигнал на входе соответствующего блока сравнения будет равен нулю. При дальнейшем движении руки вперед отсчет времени будет производиться до тех пор, пока сигнал на входе соответствующего блоха сравнения будет максимальным и отсчет времени прекратится. Таким образом, при постоянной скорости и при отсчете времени определяют путь а, пройденный сердечниками 3 или 4. В зависимости от того, где находится Ш-образный сердечник, движение руки 1 осуществляют далее вправо или влево. Как только сигнал на одном из сердечников 3 или 4 будет равен нулю включается отсчет времени и выключается после того, как сигнал станет максимальным. Таким образом определяют путь b. Необходимо добиться, чтобы захват стал соосен с деталью, или необходимо найти угол of поворота схвата, для обеспечения соосности с. деталью определяют: относительно оси ОХ X a-sinoC, относительно оси ОУ у b cos 0. Сторона С задана и равна длине стороны плиты манипулятора, т.е. .C asino6+b cos oij отсюда 2tg 1 + tg2o{/2 1 - cos oiI + tg oil2 2arctg «H-N« -ft. од корнем a2 + b 0, a +b2 7 c при a + b c. под корнем О и oi при Таким образом, при помощи формулы () угол d найден. Осуществляют поворот манипулятора на угол oi и затем последовательно перемещают плиту параллельно ее сторонам в сторону сердечников, находящихся над деталью до тех пор, пока все сердечники не окажутся над деталью 35. Затем блоком 29 коммутации диагонали мостовых схем подключаются к источнику 33 постоянного тока и происходит захват детали.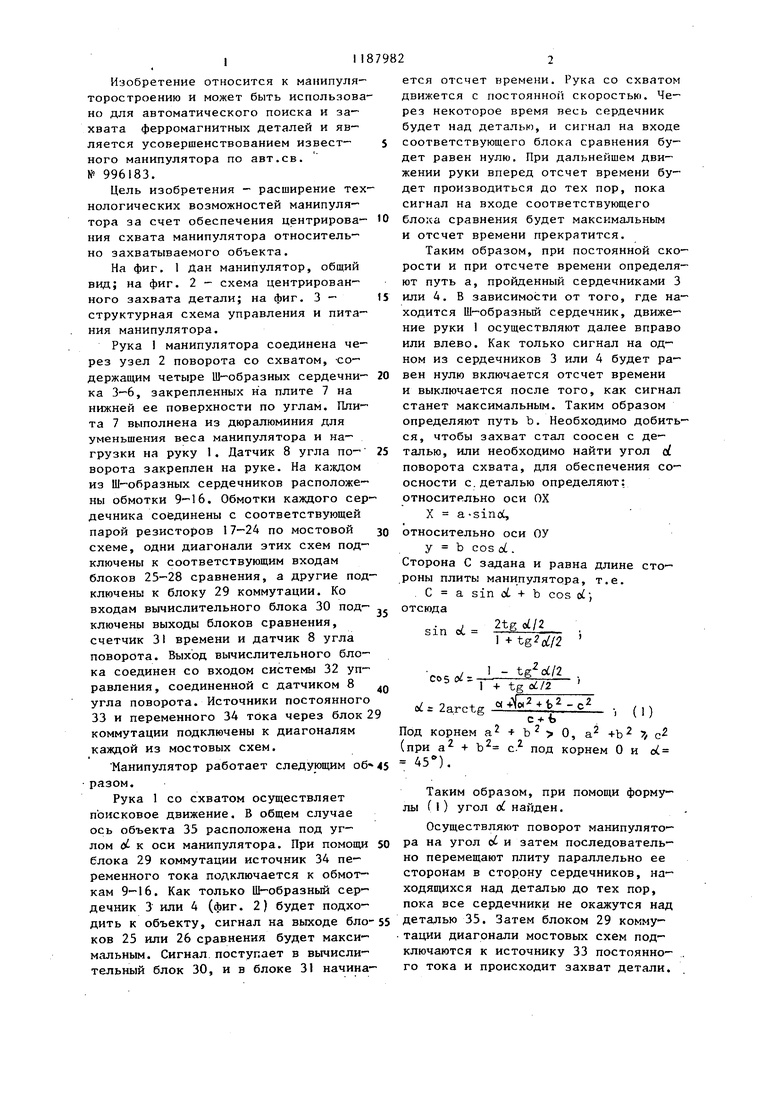
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU996183A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Автоматизированная технологическая единица | 1984 |
|
SU1184658A1 |
| Регулируемый преобразователь напряжения | 1986 |
|
SU1394366A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Электромагнитный схват | 1991 |
|
SU1815221A1 |
| Схват промышленного робота | 1986 |
|
SU1433792A1 |
| Компенсационный мост переменного тока | 1978 |
|
SU789766A1 |
МАНИПУЛЯТОР по авт.св. № 996183, отличающийся тем, что, с целью расширения технологических возможностей путем центрирования схвата манипулятора от- носительно захватываемого объекта, он снабжен тремя дополнительными Шобразными сердечниками, на каждом из которых расположены две обмотки, тремя дополнительными парами резисторов, каждая из которых с обмотками сердечника соединена по мостовой схеме, тремя дополнительными блоками сравнения, вычислительным блоком, счетчиком времени, плитой с механизмом ее поворота и датчиком угла поворота плиты, при этом плита с механизмом ее поворота закреплена на руке манипулятора, сердечники закреплены по углам плиты на нижней ее поверхности, одни диагонали мостовых схем дополнительных сердечников подключены к блоку коммутации, а другие диагонали к соответствующим входам блоков сравнения, к входам вычислительного блока подключены вы(Л ходы блоков сравнения, счетчики времени и датчики угла поворота, а выход вычислительного блока соединен с входом системы управления приводом, связанной с датчиком угла поворота плиты.
| Манипулятор | 1980 |
|
SU996183A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| f | |||
