(54) МАШЙУЛЯТОР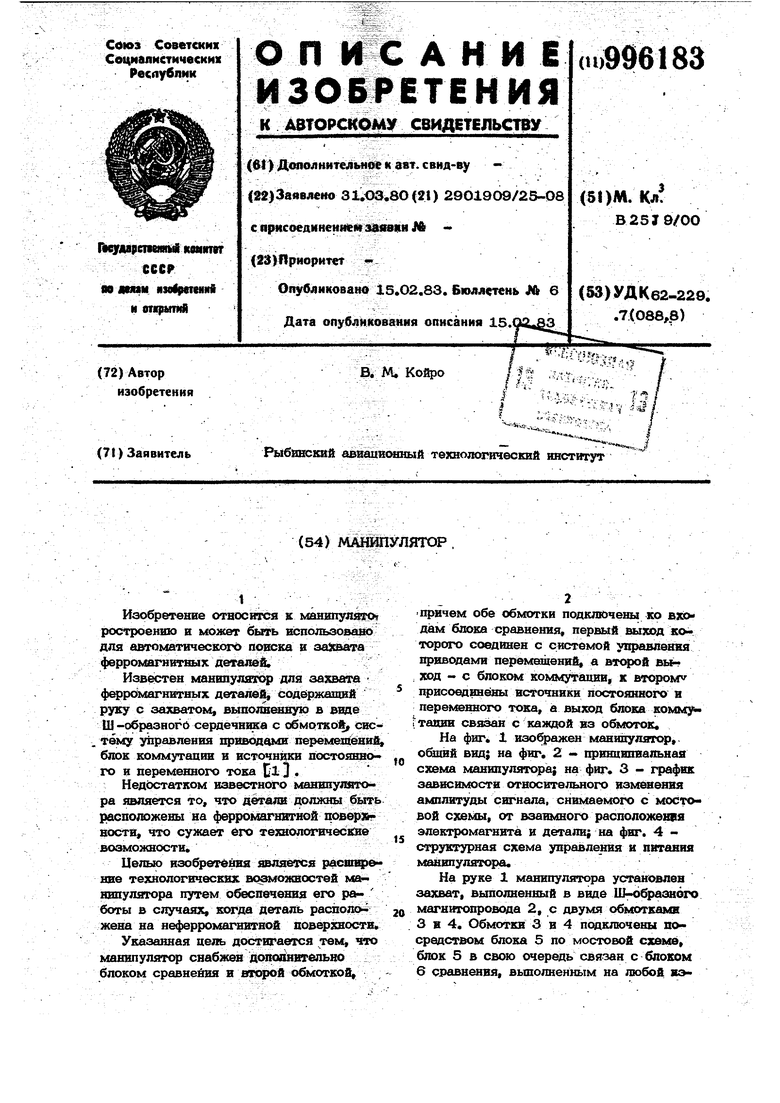
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для захвата ферромагнитных деталей с ферромагнитных поверхностей | 1976 |
|
SU649566A1 |
| Манипулятор для захватывания ферромагнитных деталей | 1981 |
|
SU975393A1 |
| Манипулятор | 1984 |
|
SU1187982A2 |
| Схват | 1986 |
|
SU1313700A1 |
| Манипулятор и способ управления им | 1990 |
|
SU1782720A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Электромагнитный схват | 1983 |
|
SU1168402A1 |
| Намагничивающее устройство | 1989 |
|
SU1793358A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| Способ манипулирования ферромагнитными деталями с отверстием | 1986 |
|
SU1799727A1 |
1
Изобретение относится к манипуля гоч poctpoeHioo н может быть нспользоваао для автоматического поиска и захвата ферромагнитных деталей;
У зв&ства мйнапулхпюр для захвата ф ро шгн1$гных деталей содержавши руку с захватом, выпошЕен ю в вщ1е Ш-образного сердечншса с обмоткой, систему управления приводами перемешений, блок коммутации и источники постоянного и переменного тока |il} .
Недостатком известного манипулятора является то, что деташЕ должны быть расположены на ферромагншной шжеряности, что сужает Ого технологические возможности.
Целью изобретения является расширьвне технологических возможностей манипулятора путем обеспечения его работы в случаях, котда деталь paciiono-i же на неферромагнвтной поверхности.
Указанная цель достигается тем, что манш1улят ф снабжен дополнигельню блоком сравнения и обмоткой.
причем обе обмотки подключены ко входам блока сравнения, первый выход которого соединен с с истемой управления приводами перемещений, а втqpoй вы: ЗЮД - С блоком КОМ иОГтацИИ, к BTOpOKfv
присоединены источники постоянного и перемеЕшого тока, а выход блока комму гташга связан с каждой из обмоток.
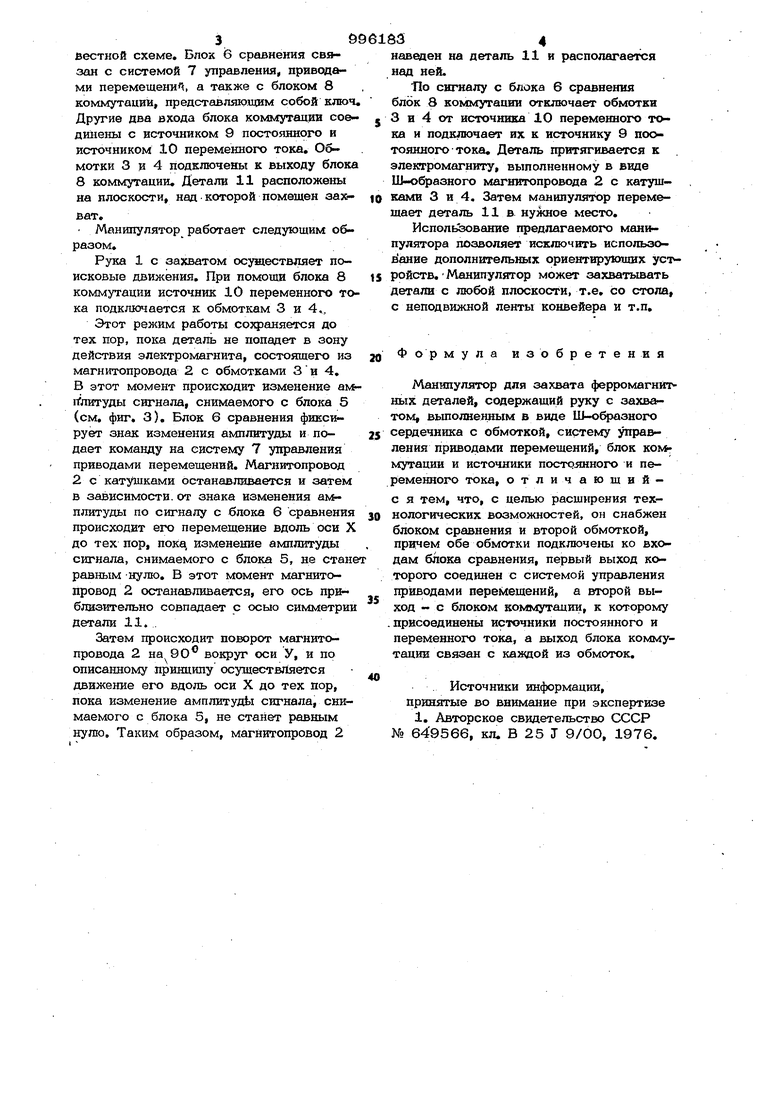
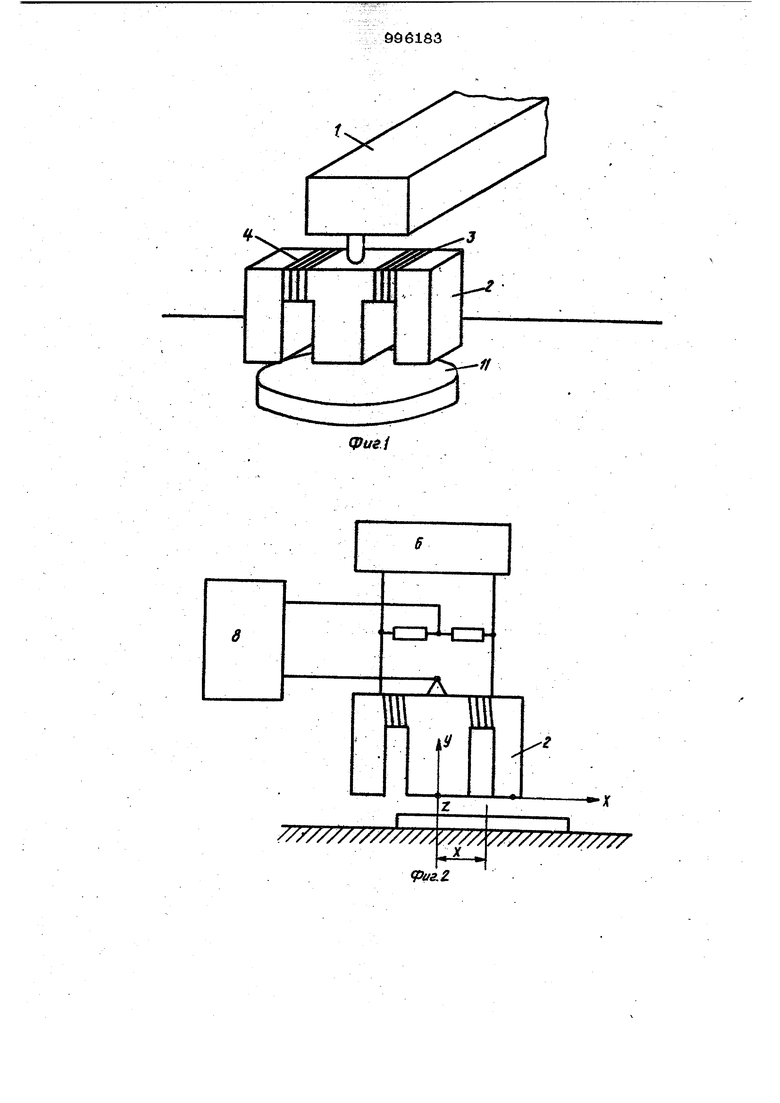
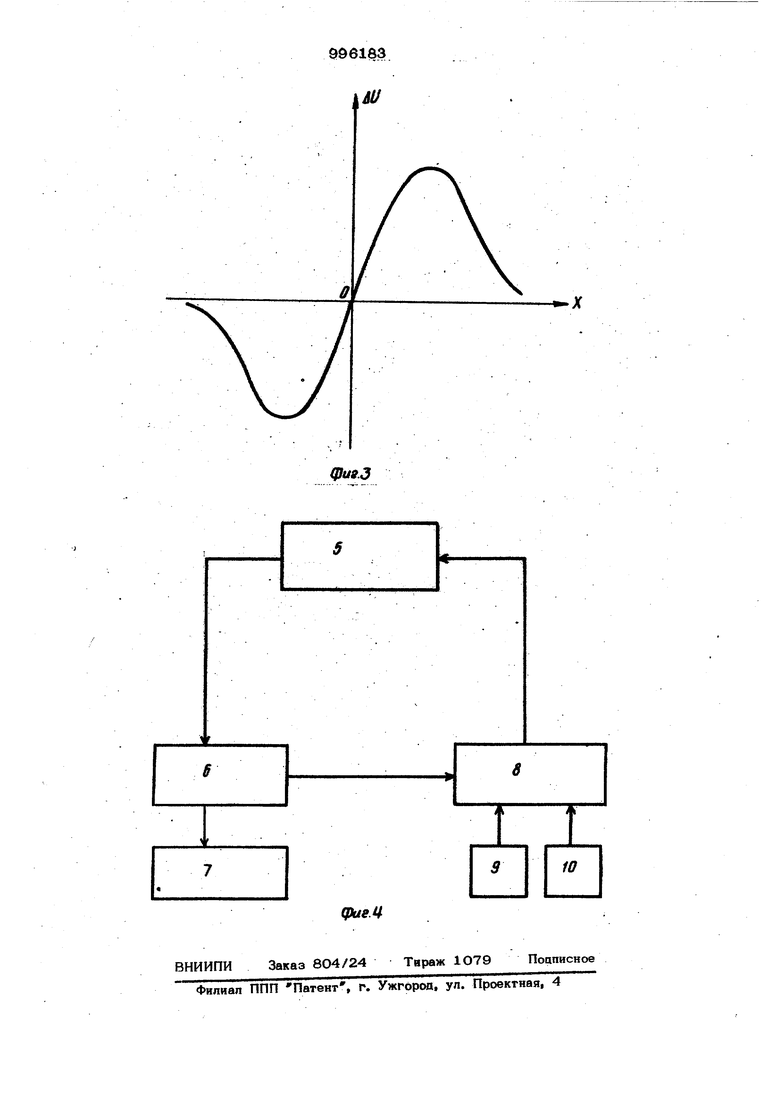
На фиг. 1 изображен манипулятор,. общий вид; на фиг. 2 - принципиальная схема манипулятора; на фиг. 3 - график зависимости относительного изменения амплитуды сигнала, снимаемого с мосто- вой схемы, от взатадного расположещ1я электромагнита и детали; на фиг. 4 структурная схема управления и питания манипулятора.
На руке 1 Maminynsrropa установлен захват, выполненный в виде Ш-образного магнигопровода 2, с двумя обмотками 3 и 4. Обмотки 3 и 4 подключены посредством блока 5 по мостовой схеме, блок 5 в свою очередь связан с блоком 6 сравнения, вьшолненным на любой вэвестной схеме. Блок 6 сравнения связан с системой 7 управления, приводами перемещений, а также с блоком 8 коммутации, представляющим собой ключ Другие два входа блока коммутации соеди11еиы с источником 9 постоянного и источником 10 переменного тока. Обмотки 3 и 4 подключены к выходу блока 8 коммутации. Детали 11 расположены на плоскости, над которой помещен захват, Манипулятор работает следующим образом. Рука 1 с захватом осуществляет поисковые движения. При помощи блока 8 коммутации источник 10 переменного то ка подключается к обмоткам 3 и 4,, Этот режим работы сохраняется до тех пор, пока деталь не попадет в зону действия электромагнита, состоящего из магнитопровода 2 с обмотками Зи 4, В этот момент происходит изменение ал 1 литуды сигнала, снимаемого с блока 5 (см, фиг, 3), Блок 6 сравнения фиксирует знак изменения амплитуды и подает команду на систему 7 управления приводами перемещений, Магнитопровод 2 с катушками останавливается и затем в зависимости, от знака изменения а№плитуды по сигналу с блока 6 сравнения происходит его перемещение вдоль оси X до тех пор, пока, изменение амплитуды сигнала, снимаемого с блока 5, не стан равным -нулю, В этот момент магнитопровод 2 останавливается, его ось приблизительно совпадает с осью симметрии детали 11. . Затем происходит поворот магнитопровода 2 вокруг оси У, и по описанному принципу осуществляется движение его вдоль оси X до тех пор, пока изменение амплитудЬ: сигнала, снимаемого с блока 5, не станет равным нулю. Таким образом, магнитопровод 2 б З наведен на деталь располагается над ней. По сигналу с блока 6 сравнения блок 8 коммутации отключает обмотки 3 и 4 от источника 10 переменного тока и подключает их к источнику 9 пооTojfflHoro тока. Деталь притягивается к электромагниту, выполненному в виде Ш-образного магнитопровода 2 с катущнами 3 и 4. Затем манипулятор перемешает деталь 11 в нужное место, ИсполЕязование предлагаемого манипулятора позволяет исключить использование дополнительных ориентирующих устройств, Манипулятор может захватывать детали с любой плоскости, т.е, со стола, с неподвижной ленты конвейера и т.п. Формула изобретения Манипулятор для захвата ферромагнИт ных деталей, содержащий руку с захватом, вьшолвенным в виде Ш-образного сердечника с обмоткой, систему управления приводами перемещений, блок коммутации и источники посто5шного и переменного тока, отличающийс я тем, что, с целью расширения технологических возможностей, он снабжен блоком сравнения и второй обмоткой, причем обе обмотки подключены ко входам блока сравнения, первый выход которого соединен с системой управления приводами перемещений, а второй выход - с блоком коммутации, к которому присоединены источники постоянного и переменного тока, а выход блока коммутации связан с каящой из обмоток, . Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР f 649566, кл, В 25 J 9/00, 1976,
//////////////W //4 /// / //////7
)JL.
Pu2.i
Х
