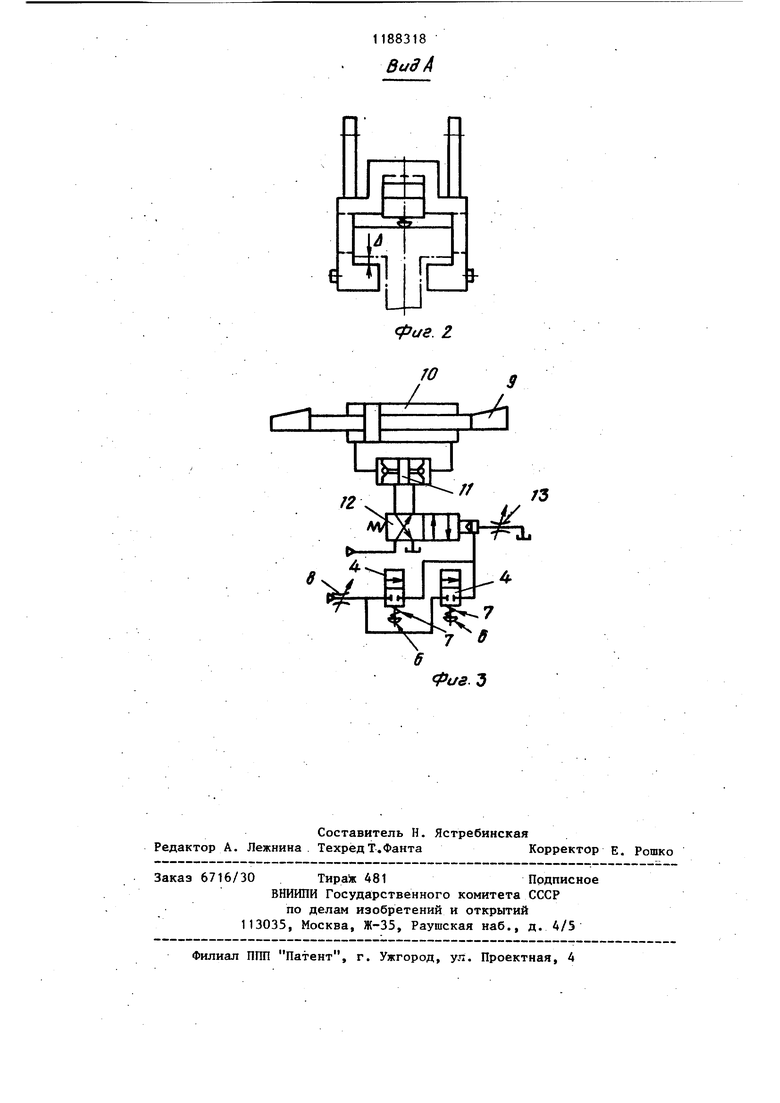
Изобретение относится к горному маппгностроению, а именно к опорам вы .емочных машин, работающих с конвейер ного става. Целью изобретения является повышение точности управления движением выемочной машины в профиле пласта с изменяющейся гипсометрией, ) На фиг. 1 изображена предлагаемая опора; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3,- гидравлическа схема опоры выемочной машины. Опора выемочной машины содержит опорную льгау 1 и обратный захват 2, который выполнен в виде двух элемен тов, жестко соединенных между собой планками 3. Опорная лыжа 1 имеет про ушины для установки ее на кожухе выемочной машины и с двух сторон по ходу машины датчики 4 положения, сле дящие за профилем направляющей 5 ку,лачками 6 с пружинами 7 и выполненны в виде гидрораспределителей, в которые рабочая жидкость через гидродроссель 8 поступает на гидросистемы выемочной машины. Обратный захват 2 установлен на опорной лыже 1 через клинья 9, жестко соединенные со штоками гидроцилиндра 10, укрепленного на опорной лыже 1 и снабженного гидрозамком 11 и гидрораспределителем 12 с гидравлическим управлением от датчиков 4 положения, имеющим на сливе гидродроссёль 13. Рабочая жидкость в гидроцилиндр 10 поступает из гидро системы выемочной машины. Опора работает следующим образом. Минимальная величина зазора Д между обратным захватом .2 опоры и направляющей 5 устанавливается при крайнем прав.ом положении гидрораспределителя 12 (фиг. 3). Гидрозамок 11 фиксирует поршень гидроцилиндра 10 в этом положении. При изменяющейся гипсометрии почвы пласта секции направляющей, аппроксимирующие поверхность почвы пласта, отклоняются от прямолинейного положения и на стыках секций образуются выпуклые или вогнутые профили, для перехода которых необходимо увеличить ааэор U . Регулировка положения производ|у ся автоматически следующим образом. Датчик 4 положения (правый или левый в зависимости от направления движения выемочной машины) через кулачок 6, постоянно прижатый пружиной 7 к направляющей 5, реагирует на изменение профиля стыков смежных секций направляющей 5. Если направляющая 5 прямолинейна, датчик 4 прорывает движение жидкости, гидрораспределитель 12 находится в исходном положении, обратный захват 2 поднят, зазор и минимальный. При отклонении профиля направляющей от прямолинейности кулачок 6 отклоняет поршень датчика А положения вверх или вниз, обеспечивая поступление рабочей жидкости к системе гидроуправления гидрораспределителем 12, переводя его в новое положение. Происходит перемещение штоков гидроцилиндра 10, при котором клинья 9 освобождают обратный захват 2 опоры и он опускается вниз, увеличивая до максимума зазор Л , что позволяет опоре беспрепятственно проходить иск ривленные стыки смежных секций направляющей. При переходе кулачка 6 на прямолинейный участок поршень датчика 4 положения перемещается в начальное положение, пружина гидрораспределителя 12, преодолевая сопротивление гидродросселя 13, выталкивает жидкость и переводит поршень гидрораспределителя в исходное положение. Клинья 9, перемещаясь, возвращают обратный захват 2 в исходное положение, обеспечивающее минимальный зазор А . Такое положение устройства сохраняется до встречи датчика 4 положения со стыком, имеющим отклонение от прямолинейности в вертикальной плоскости. Предлагаемая конструкция опоры исключает износ и деформацию направляющей и обратных захватов и не оказывает сопротивление перемещению выемочной машины.
1188318
Вид А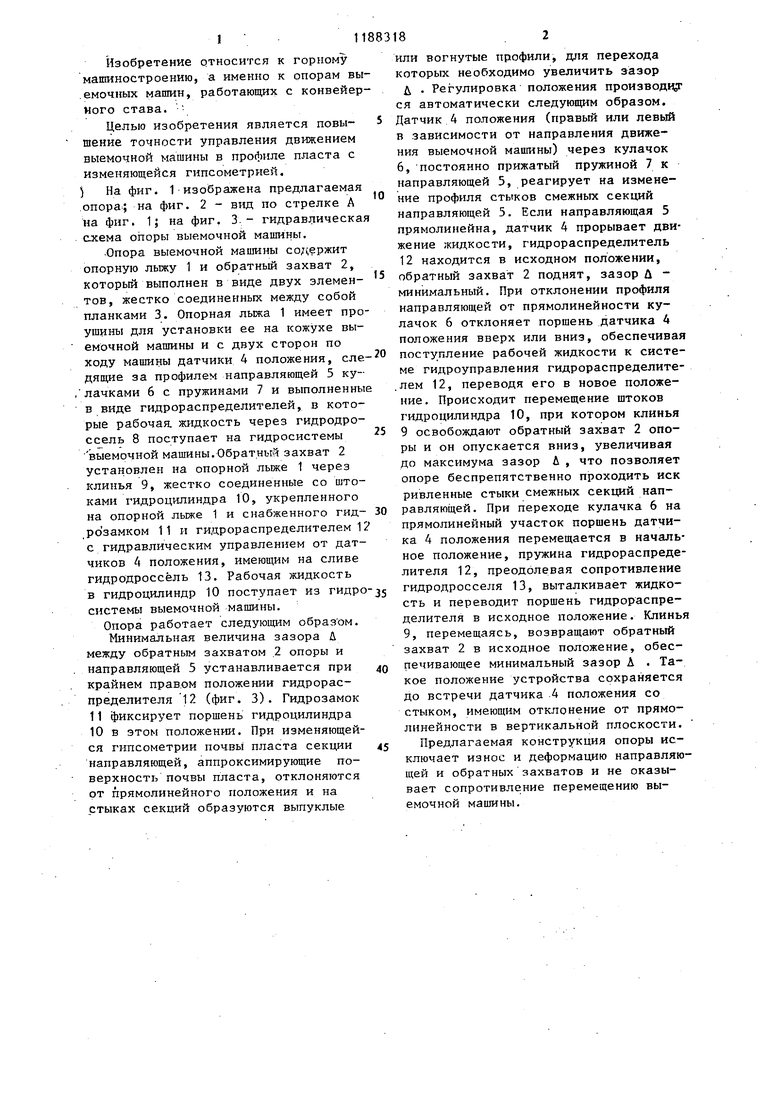
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления выемочным агрегатом | 1978 |
|
SU767345A1 |
| Устройство управления движением выемочного агрегата по гипсометрии угольного пласта | 1982 |
|
SU1180499A1 |
| Устройство для управления движением выемочного комплекса в плоскости пласта | 1979 |
|
SU881314A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АГРЕГАТОМ ПО ГИПСОМЕТРИИ ПЛАСТА | 1991 |
|
RU2012799C1 |
| Устройство для управления выемочным агрегатом по гипсометрии пласта | 1976 |
|
SU636404A1 |
| УГЛЕДОБЫВАЮЩИЙ АГРЕГАТ | 1996 |
|
RU2130553C1 |
| Устройство для управления исполнительным органом выемочной машины | 1980 |
|
SU899919A1 |
| КОМПЛЕКС ДЛЯ НАКЛОННЫХ И КРУТЫХ ПЛАСТОВ КДК ДОЛИНСКОГО, СТАВ КОНВЕЙЕРА, СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСА | 2004 |
|
RU2276729C1 |
| Устройство для автоматического поддержания прямолинейности базовой балки | 1980 |
|
SU877060A1 |
| Устройство для управления выемочной машиной по гипсометрии угольного пласта | 1978 |
|
SU678186A1 |
ОПОРА ВЫЕМОЧНОЙ МАШИНЫ, вклю чающая опорный элемент и о.братный захват, отличающаяся тем, что, с целью повышения точности управления движением выемочной машины в профиле пласта с изменяющейся гипсометрией, опорный элемент выполнен в виде опорной лыжи, а обратный захват - в виде двух элементов, соединен ных планками, установлен на опорной лыже через клинья жестко соединенные со штоками гидроцилиндра, укрепленного на опорной лыж и снабженного гидрораспределителем и гидрозамком, при этом опорная лыжа с обеих сторон снабжена датчиками положения, выполненными в виде гидрораспределителей, имею§ щих подпружиненные кулачки. (О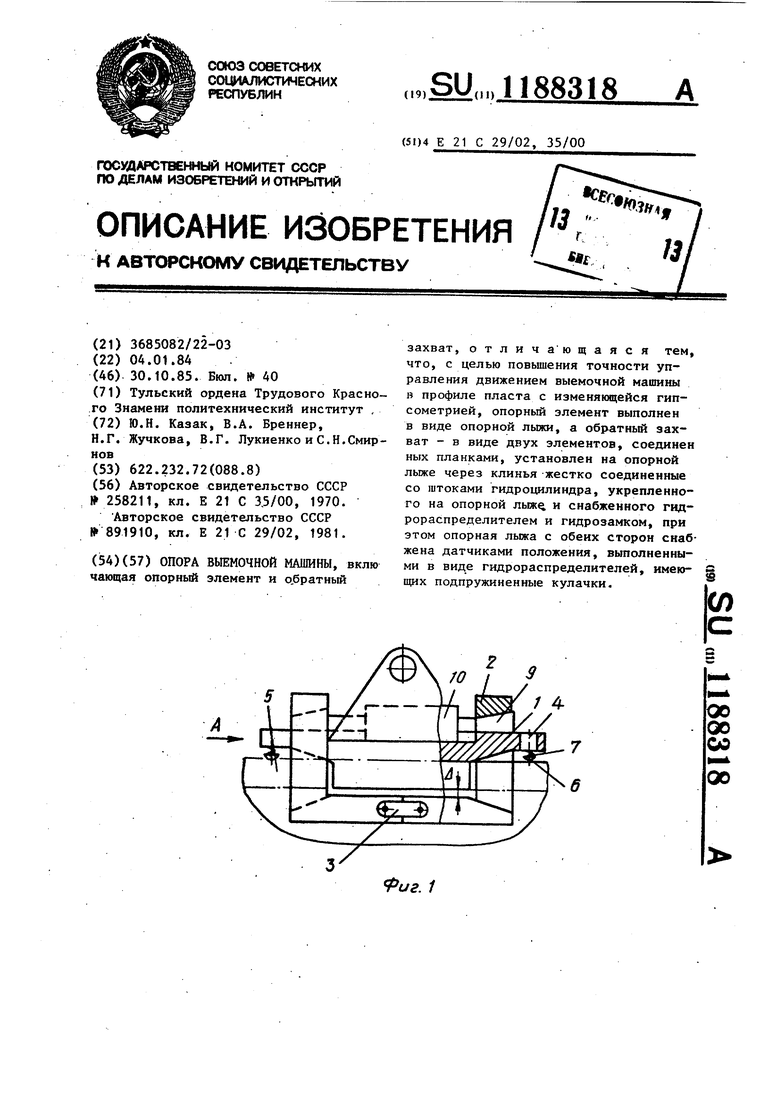
ai
It:
Гг
с:
LJ
рие. Z
| ОПОРА УЗКОЗАХВАТНОГО 'КОМБАЙНА | 0 |
|
SU258211A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Механизм подачи выемочного комбайна | 1980 |
|
SU891910A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
