2. Устройство по п. 1, отличающееся тем, что блок моделирования положения канатов лебедок содержит задатчик положения конца стрелы и веса груза, подключенные одними входами к его выходам формирователи сигнала, пропорционального траектории движения груза, к выходам которых непосредственно и через элемент И подключены одними и другими входами формирователи сигнала положения канатов, и подключенный к их выходам входами элемент ИЛИ, выход которого является первым выходом блока, вторым и третьим выходами которого являются выходы формирователей сигнала положения канатов.
3. Устройство по п. 1, отличающееся тем, что блок формирования сигналов, пропорциойальных силам натяжения канатов, состоит из подключенного на входе формирователя треугольника сил, подключенных к его выходам непосредственно и через один из входов элемента И, одним и другим входами соответственно вычислителями сил натяжения, выходы которых являются выходами блока, и элементов моделирования сил натяжения, выходы которых соединены с дру гими входами элементов И, а вторые и третьи входы - с выходами вычислителей сил натяжения и генераторов строчной и кадровой разверток.

| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер оператора грузоподъемных машин | 1982 |
|
SU1081645A1 |
| Тренажер оператора грузоподъемных устройств | 1977 |
|
SU750550A1 |
| Устройство для обучения операторов грузоподъемных машин | 1982 |
|
SU1035635A1 |
| Устройство для обучения операторов грузоподъемных машин | 1978 |
|
SU769602A1 |
| Устройство для обучения крановщика навыкам по управлению краном | 1972 |
|
SU474037A1 |
| Способ управления драглайном и устройство для его осуществления | 1986 |
|
SU1421836A1 |
| Ограничитель грузоподъемности стреловых кранов | 1976 |
|
SU591395A1 |
| Тренажер водителя погрузчика | 1984 |
|
SU1163344A1 |
| Имитатор движущихся объектов | 1987 |
|
SU1413659A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
1. УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРА ГРУЗОПОДЪЕМНОЙ МАШИНЫ, содержащее подключенный к выходам командоаппаратов блок моделирования реальных процессов, и электроннолучевой индикатор с генераторами строчной и кадровой разверток, отличающееся тем, что, с целью повышения эффективности обучения, устройство снабжено блоком моделирования положения канатов лебедок, один из выходов которого соединен с входом электронно-лучевого индикатора, и блоком формирования сигнала, пропорционального силам натяжения канатов, выходы которого соединены с соответствующими входами блока моделирования реальных процессов, а входы - с другим и третьим выходами блока моделирования положения канатов лебедок и выходами генераторов кадровой и строчной разверток. (Л 00 00 1 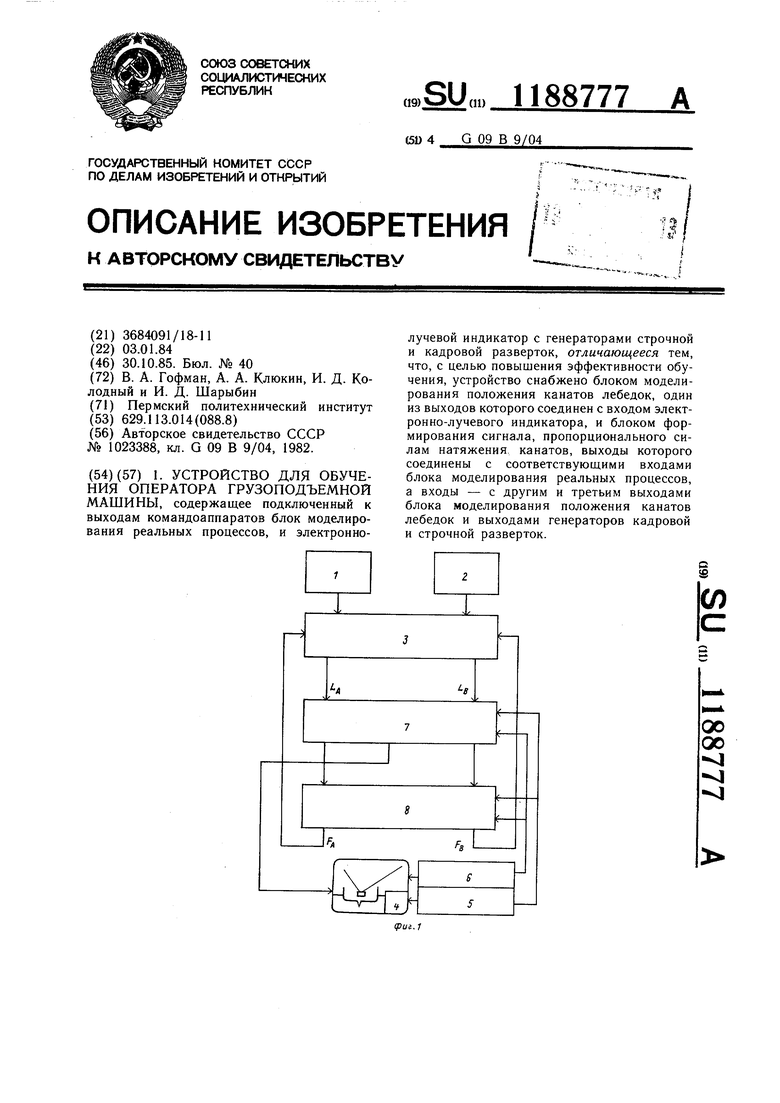
1
Изобретение относится к обучающим устройствам для выполнения погрузочноразгрузочных работ в целях профессиональной подготовки, а также проверки и повышения квалификации операторов судовых стреловых грузоподъемных машин (ГПМ) методом «телефон в условиях учебного класса.
Цель изобретения - повышение эффективности обучения.
На фиг. 1 показана блок-схема устройства; на фиг. 2 - схема блока моделирования положения канатов лебедок; на фиг. 3 - схема блока формирования сигналов, пропорциональных силам натяжения канатов.
Устройство (фиг. 1) содержит командоаппараты 1 и 2, блок моделирования реальных процессов 3, электронно-лучевой индикатор 4 с генераторами строчной 5 и кадровой 6 разверток, блок 7 моделирования положения канатов лебедок и блок 8 формирования сигнала, пропорционального силам натяжения канатов. Командоаппараты 1 и 2- это типовые командоаппараты, применяемые для управления подъемными лебедками на судах.
Блок 7 моделирования реальных процессов содержит два решающих устройства для решения системы дифференциальных уравнений
F6F F« -fff;
(1) (2) (3)
0
Cll,(F«-FA)dt + l(o),
1 SlBdt + К(о)
пусковое ускорение двигателя; суммарная масса привода и механизма лебедки, приведенная к окружности наматывающего барабана;
fvi - сила натяжения каната;
I - длина каната.
Блок 7 моделирования положения канатов лебедок (фиг. 2) содержит задатчик 9 положения конца стрел и веса груза, представляющий собой блок переменных резисторов, формирователи 10 и 11 сигналов, пропорциональных траектории движения груза, элемент 12 И, формирователи 13 и 14 сигналов положения канатов, элемент 15 ИЛИ.
Формирователи 10 и 11 формируют изображение двух четвертей окружностей с радиусами LA и LB и центрами в концах стрел. Эта информация на экран индикатора 4 не выводится.
5 Формирователи 13 и 14 сигналов положения канатов формируют изображение двух лучей, исходящих из концов стрел и оканчивающихся в точке пересечения двух четвертей окружностей.
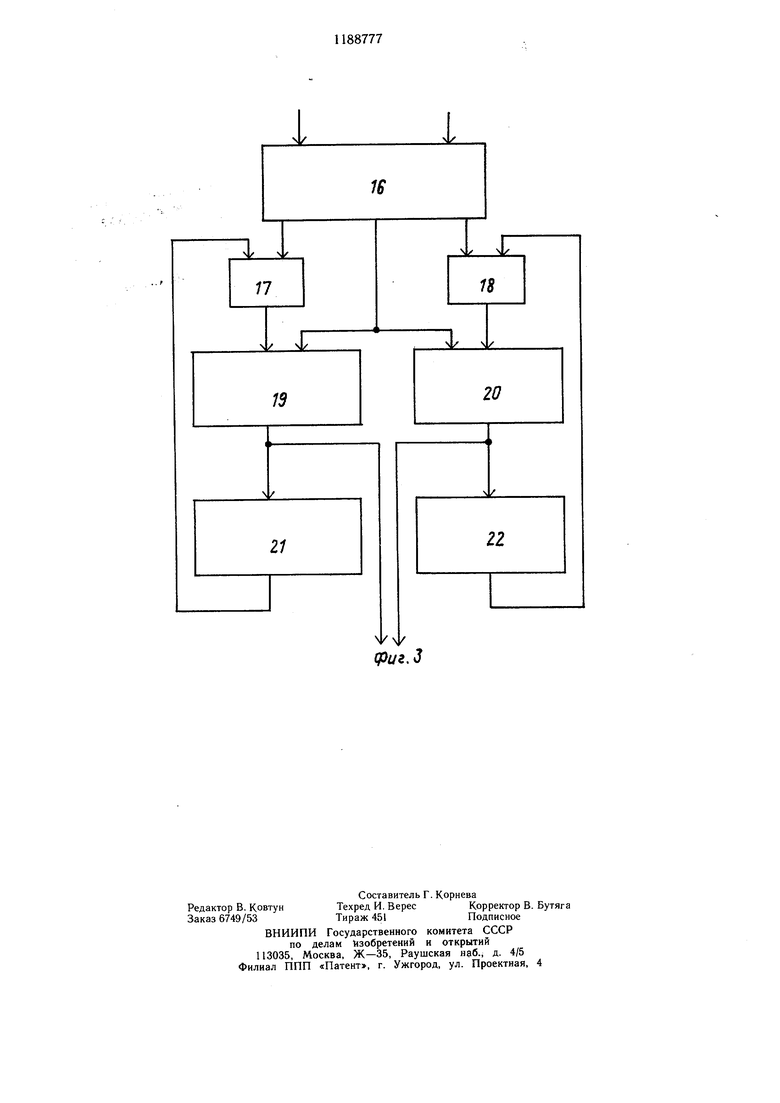
Блок 8 формирования сигнала, пропорционального силам натяжения канатов (фиг. 3) содержит формирователь 16 треугольника сил, элементы 17, 18 И, вычислители 19 и 20 сил натяжения и два элемента 21 н 22 моделирования сил натяжения. 5 Формирователь 16 формирует изображение треугольника, состоящее из отрезка длиной, пропорциональной массе груза и двух лучей, исходящих из концов этого отрезка под углами наклона канатов.
Вычислители 19 и 20 силы натяжения
0 представляют собой интеграторы, изменение
напряжения на выходах которых зависит
от очередности прихода входных сигналов.
Элементы 21 и 22 моделирования сил натяжения представляют собой устройства для формирования изображения четвертей 35 окружностей с радиусами, пропорциональными силам натяжения канатов.
Устройство для обучения оператора грузоподъемной машины работает следующим образом.
В исходном положении груз находится на дне судна. Обучаемый, манипулируя рычагами командоаппаратов 1 и 2, поднимает груз и перемещает его на причал.
Изменение положения рычагов командоаппаратов приводит к изменению сигналов LA и LB на выходах блока 3 моделирования реальных процессов, что приводит к изменению радиусов окружностей, формируемых формирователями 10 и 11 сигналов, пропорциональных траектории движения груза, а значит и положения точки их пересечения, что вызывает, в свою очередь, изменение положения изображения канатов на экране индикатора 4, формируемого формирователями 13 и 14.
Изменение положения канатов приводит к изменению треугольника сил, так как углы наклона канатов изменяются,.а значит изменяется очередность прихода сигналов на вычислители сил натяжения канатов, поэтому напряжение на выходе интегратора вычислителя сил натяжения канатов изменяется до тех пор, пока очередность прихода входных сигналов не восстановится за счет уменьшения радиусов четвертей окружностей, формируемых элементами 21 к 22 -моделирования сил натяжения, т. е. вычислители 19 и 20 и элементы 21 к 22 образуют следящие
системы для определения сил натяжения канатов.
Многократно повторяя цикл перегрузки с судна на берег и обратно при изменении положения концов стрел и веса груза, обучаемый приобретает навыки управления
грузоподъемными лебедками при перегрузке методом «телефон.
При использовании предлагаемого устройства для обучений матросов повышается производительность труда, уменьшается число поломок механизмов и аварий из-за плохой подготовки оператора.
i
| Устройство для отображения информации на экране электронно-лучевой трубки | 1982 |
|
SU1023388A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
