Изобретение относится к электротехнике, а также к электроприводам с частотным регулированием скорости вращения асинхронного двигателя (АД), обеспечивающим режим по перед че.электромагнитной мощности в ротор двигателя с минимальными потерями. .Задача состоит в управлении напряжением, но без непосредственно го измерения магнитного потока АД в полюсах статора ири воздушном зазоре таким образом, чтобы средняя за период мощность переменного тока, подводимая к двигателю, передавалась ,в ротор двигателя с минималь ными по т ер я МП .Цель изобретения - повьшление эко номичности системы за счет оптимизации потребляемой двигателем мощности при изменении нагрузки. На чертеже представлен один из возможных вариантов устройства, с помощью которого реализуется способ. Устройство содержит управляемьш выпрямитель. 1, автономный инвертор напр.яжения, АД 3, подключенньй к ин вертору, блок 4 управления выпрямителем; блок 5 управления инвертором блок -6 управления систелой, сумматор 7, блок 8 ключей, блок 9 питания ключей 8, вычислительньй блок 10 и синхронизатор 11„ Управляемьй выпрямитель 1, автономньм инвертор 2 напряжения, ДЦ 3, блок 4 управления выпрямителем, блок 5 управления инвертором, блок 6 управления системо образуют типовую схему управления АД с явно выраженным звеном постоян ного тока. Блок 9 питания ключей соединен с сумматором 7 через блок 8 ключей. Вычислительный блок 10 соединен с вы ходом автономного инвертора- 2 по то ку и напряжению, а выходы вычислительного устройства 10 соединены с одним из входов блока 6 управлени системой. Выход автономного инвертора 2 по напряжению соединен с вхо дом синхронизатора 11, выход которо го соединен с входом блока 6 управления системой, выходы которого соединены с входами блока 8 ключей и с входами вычислительного блока 10 Изложим теоретические основы дан ного способа, а затем на примере работы устройства поясним работу способа. Мощность, подводимая к двигателю, может быть записана UIcosV l2R+ii)I(T,) (1) В выражении (1) первое слагаемое - это мощность потерь в активном сопротивлении обмотки, второе слагаемое - электромагнитная мощность, передаваемая обмоткой через воздушный зазор в ротор двигателя, где I, V - векторные значения тока статора, потокосцепления в воздушном зазоре. Выразим электромагнитную мощность через активную мощность, подводимую к двигателю, и мощность потерь в активном сопротивлении обмотки ujIJr,)UIcos4-PR, (2) Разделим левую и правую часть выражения (1) на UIcos .(и I iLL CiVU,,;- nT., Il., L Левая часть выражения (3) c/CU,, ) - Б относительных единицах характеризует передачу мощности переменного тока через воздушный зазор в ротор двигателя. Найдем приращение функции o/(U,l,/) при малых измененильж напряжения. Тогда приращение функции можно заменить приращением ее дифференциала (j :7R5-.nV „ 4oi(U,jy) ц ди 4J ЧЧл UcosV L и Рассмотрим выражение (4) применительно к частотному регулированию АД, Изменение напряжения - один регулируемьм параметр при заданной частоте (частота задается из технологических соображений). Для каждой частоты и каждого момента нагрузки следует пошагово выбирать такое приращение напряжения, чтобы величина Лс1 была положительной. Работа АД может протекать при различных oi, но оптимальным будем считать такой режим, при котором величина oi. максимальна. Этого можно достигнуть с помощью шаговой системы экстремального регулирования. Задаем значения 4U и определяем значения л1 и , вызванные приращением напряжения, .Затем определяем прираи.ения дс/ по форму3. ле (4). Если положительно, то делаем следующий шаг в ту. же сторону. При чрезмерном увеличении напряжения относительное приращение тока будет больше относительного прираще ния напряжения, и значения oL будут уменьшаться, о чем будет говорить отрицательное значение. Как видно из описания алгоритма, этот способ применим для управления асинхронными двигателями (АД) и поз воляет в них достичь режимов, обеспечивающих передачу электромагнитной мощности в ротор двигателя с ми ним1альными потерями, что повышает экономические показатели системы за счет снижения потребляемой мощности Устройство работает следующим об разом. По сигналу Пуск на выходе блока 6 управления появляются сигналы, которые подаются в блок 4 управления выпрямителем и в блок 5 управления инвертором, и которые осуществляют запуск АД по схеме, .используемой в преобразователях частоты серии ТПЧ. Так как в приведенной схеме отсутствует блок измерения внутренней ЭДС двигателя, то коррек ции по потоку нет и соотношение меж ду U и f вьщерживается приближенно. Б установившемся режиме осуществ ляется оптимизации процесса. При переходе волны питающего напряжения от минуса к плюсу блок 11 синхронизации вырабатывает импульс и посылает его в блок 6 управления, которьй формирует импульс и передает его в вычислительный блок 10. По этому сигналу на периоде напряжения, питающего АД 3, определяются Ijj,Up ,cos Чр. При переходе волны . питающего напряжения от минуса к пл су второй раз блок синхронизации формирует второй импульс, который поступает в блок 6 управления системой. По этому импульсу блок 6 управления системой формирует два сигнала: один сигнал поступает на вход блока ключей, к напряжению зад ия Uj добавляется приращение напряжения лЪ, а по действию второго сиг нала определяются параметры питакнцего напряжения Ц ,1 и cos -f на втором периоде (на втором периоде блок управления выпрямителем получил увеличенное на 4U задание). После окончания второго периода в вычисли404тельном блоке 10 определяется по формуле (4) функция 4о(и ,1 ,4) - приращение относительной мощности, передаваемой через воздушный зазор. Величины 4U,I, л4 определяются по соотношению .-и .,-1д; -if Если приращение /ic/dJ,,) положительно, то вычислительный блок 10 формирует сигнал по каналу 12, если приращение )c(U,I,) отрицательно, то вычислительный блок 10 формирует сигнал по каналу 13. Вычисление 4oi(U,I,V) определяется в третьем пе- риоде-. При этом может быть два варианта: вычисления занимают значительную часть периода (первый случай) и вычисления занимают незначи тельную часть периода (второй случай). Рассмотрим для конкретности первьш случай. В этом случае при приходе четвертого синхроимпульса от блока 11 синхронизации блок 6 управления системой вырабатывает сигнал, которьй появляется по каналу 12 или по каналу 13. При положительном значении 4ot(U,I,f) сигнал появляется по каналу 12, что увеличивает выход- . нов напряжение блока ключей еще на один шаг AUn. Таким образом, напряжение задания увеличилось и стало равно U2+2AUf,. Если значение Дгi(U,I,f) отрицательно, то сигнал с выхода блока 6 управления появится в канале 13, что приведет к уменьшению напряжения задания на величину Ug-AUn. Таким образом, делая пробные ша- ги, и на каждом шаге определяя значение До{(и, I, If) , получимэкстремальную систему регулирования с пошаговым автоматическим поиском экстремума. Изменение момента нагрузки будет смещать положение экстремума, но шаговая экстремальная система будет его каждый раз находить. Для ускорения выхода системы на экстремум можно усложнить алгоритм и величину пробного шага ли,, сделать тем больше, чем больше лхХи,I, V). Для уменьшения ошибки при определении и, 1,4 можно эти величины определить не на одном периоде, а на нескольких периодах. Из описания работы экстремальной системы видно, что ее целесообразно применять для тех приводов переменного тока, момент которых относительно медленно меняется во времени, а вели5 11888406
чина момента ниже номинального. Такиерасти таким образом, чтобы обеспечить
двигатели переменного тока загружаютпередачу электромагнитной мощности
сеть реактивной мощности и понижаютв ротор двигателя с минимальными по-
cosS сети.с терями. Такой режим позволит повысить
Предлагаемый способ позволяетэкономические показатели системы за
уменьшить реактивную мощность за счетсчет снижения двигателем потребляепонижения напряжения питания, Примой мощности и за счет повышения коувеличении момента напряжение будетэффициента мощности сети.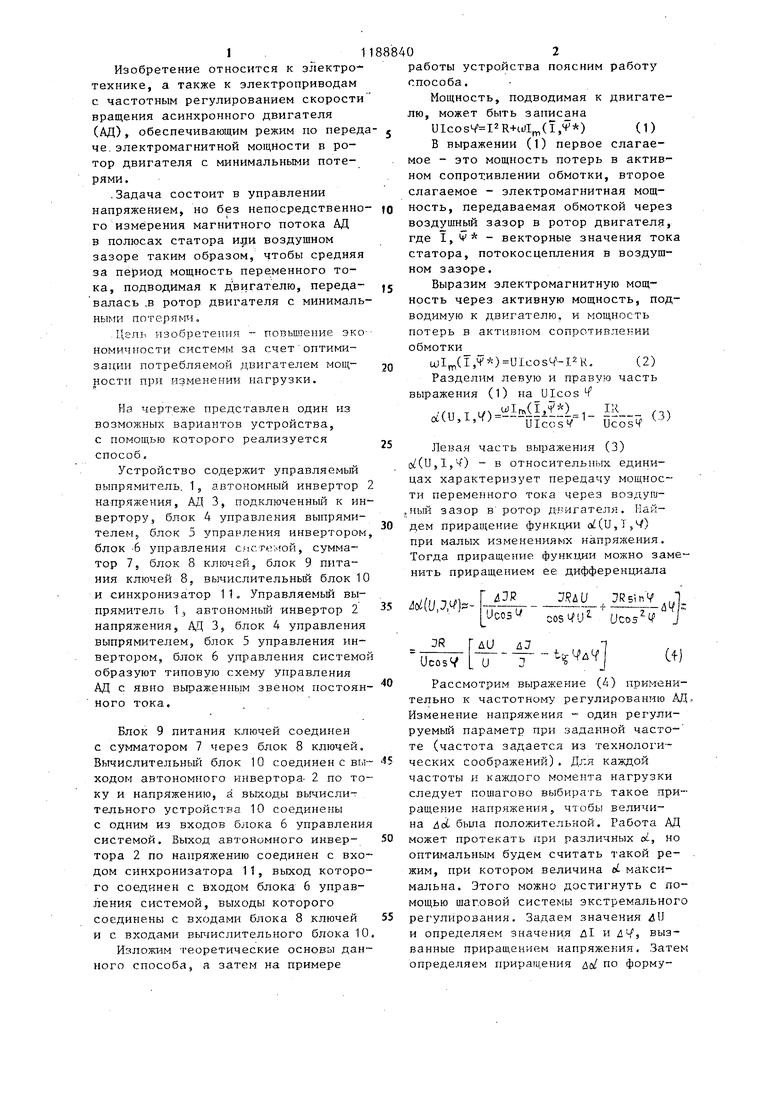
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2008642C1 |
| Частотно-регулируемый электропривод | 1985 |
|
SU1350802A1 |
| Частотно-регулируемый электропривод переменного тока | 1985 |
|
SU1292157A1 |
| Вентильный электропривод | 1985 |
|
SU1300619A1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока и устройство для его осуществления | 1986 |
|
SU1418626A1 |
| Устройство для управления асинхронным электродвигателем | 1979 |
|
SU864479A1 |
| Система управления | 1983 |
|
SU1168896A1 |
| СИСТЕМА ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2010 |
|
RU2470454C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ, подключенным к преобразователю частоты, при котором изменяют частоту и напряжение питания электродвигателя, частоту регулируют по заданному закону, а напряжение изменяют в заданном отношении к частоте, которое формируют по результатам измерения напряжения, тока и угла между ними, отличающийся тем, что, с целью повышения экономичности за . счет оптимизации потребляемой мощности при изменении нагрузки, для формирований заданного отношения напряжения к частоте осуществляют пробные колебания напряжения, определяют относительные приращения напряжения, тока и угла V между ними по отношению к предыдущим значениям, относительное приращение угла умножают на tgtf, суммируют полученные значения и по получении положительной суммы увеличивают, а отрицательной - уменьшают величину напряжения до получения нулевых приращений алгебраической суммы. оо 00 00 4 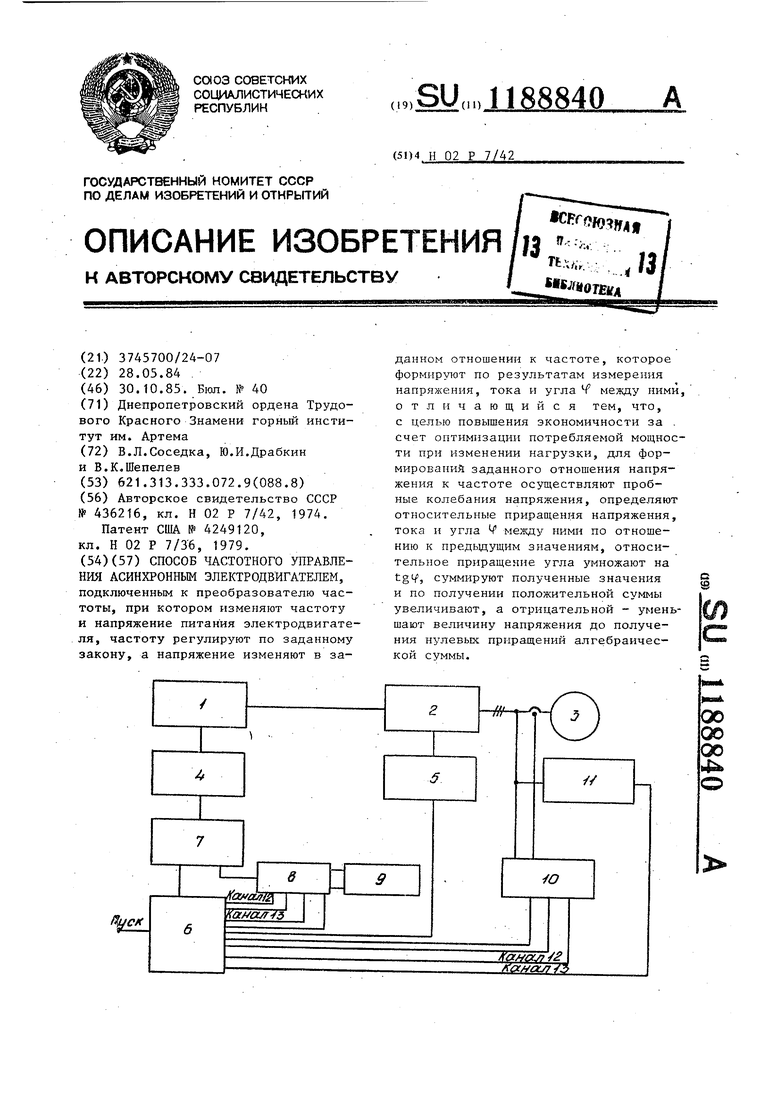
| СПОСОБ ОБЕЗВОЖИВАНИЯ ПРОДУКТОВ11 8ШРР>& | 1972 |
|
SU436216A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4249120, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
