в виде установленных по краям приемной площадки трех сопл с расположенными внутри шиберами 32, управляемыми от подпружиненных поршневых гидроцилиндров 31. Механизм поворота на 90° в вертикальной плоскости выполнен в виде свободно надетого на штангу подвижного элемента, на котором симметрично расположены фиксаторы, поочередно взаимодействующие с пазами на наружной поверхности штанги 1. Для шагового движения каретки 16 с рабочим органом предназначен тандем - сдвоенный силовой цилиндр с глухой перегородкой, снабженный фиксирующими элементами, взаимодействующими с пазами на направляющей 42, Щаг которых равен минимальному шагу укладки кирпича. Действие манипулятора осуществляется в соответствии с циклограммой по комайдам управляющего вычислительного блока и датчиков конечных положений подвижных элементов системы. 4 з,п. ф-лы, 9 ил,
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для кладки кирпича | 1990 |
|
SU1767131A1 |
| Манипулятор для кладки стен из штучных элементов | 1990 |
|
SU1778261A2 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ БЛОКОВ ПРЕССОВАНИЕМ, ПРЕСС-ФОРМА И ЛИНИЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1995 |
|
RU2087307C1 |
| Манипулятор | 1982 |
|
SU1073086A1 |
| Манипулятор | 1980 |
|
SU872251A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Манипулятор | 1976 |
|
SU538957A1 |
| Автоматическая линия изготовления жестяных консервных банок | 1986 |
|
SU1362550A1 |
Изобретение относится к строительству и может быть использовано для осуществления кладки стен из кирпича и блоков. Манипулятор содержит схват в виде вертикальной полой штанги 1 с П-образной скобой 2, и механизмами его перемещения и поворота на 90° в вертикальной плоскости, механизм переворота кирпича на 180°, механизм подачи раствора в вертикальные швы, механизм подачи кирпича. Все механизмы используют силовые цилиндры. В штанге 1 размещен ра'створопровод 28. Механизм переворота на 180° содержит два привода 17и 18сзамкнутой гидравлической взаимосвязанной системой. Механизм подачи раствора в вертикальные швы выполнен/5СОго елf ^^ f / \ -.-^^ Э1 f J3 31 ^^УигЛ
Изобретение относится к строительству и может быть использовано для осуществления кладки стен из кирпича и блоков.
Цель изобретения - повышение надежности работы.
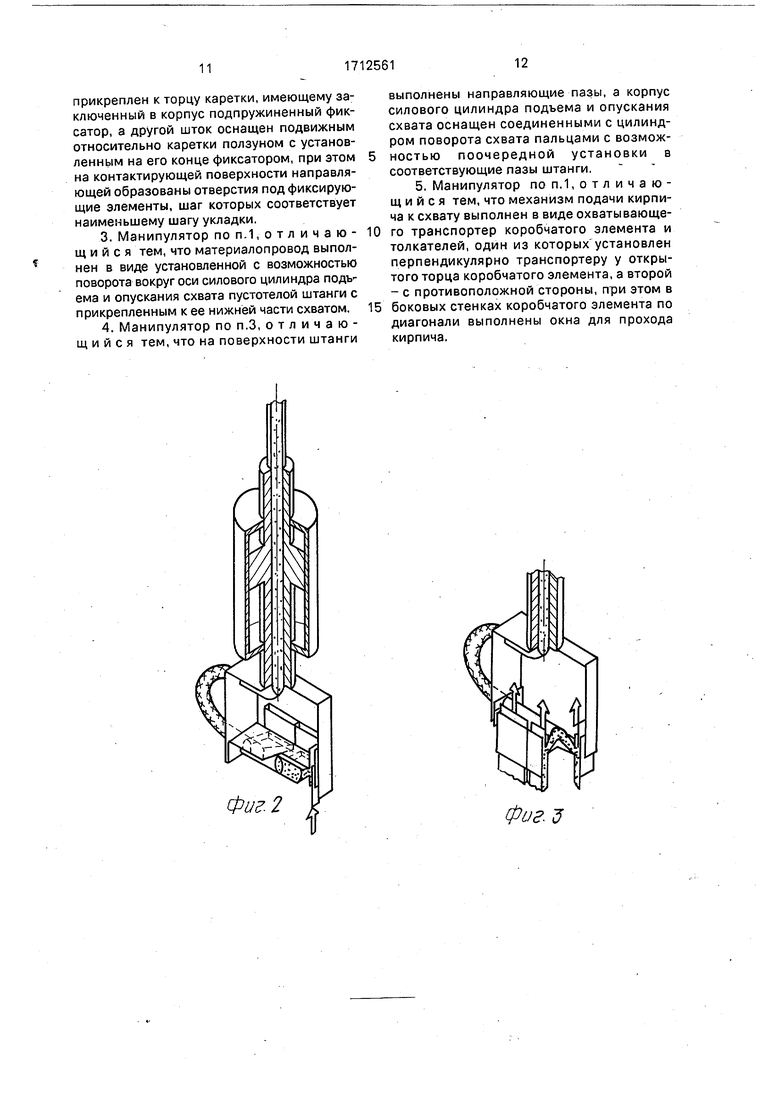
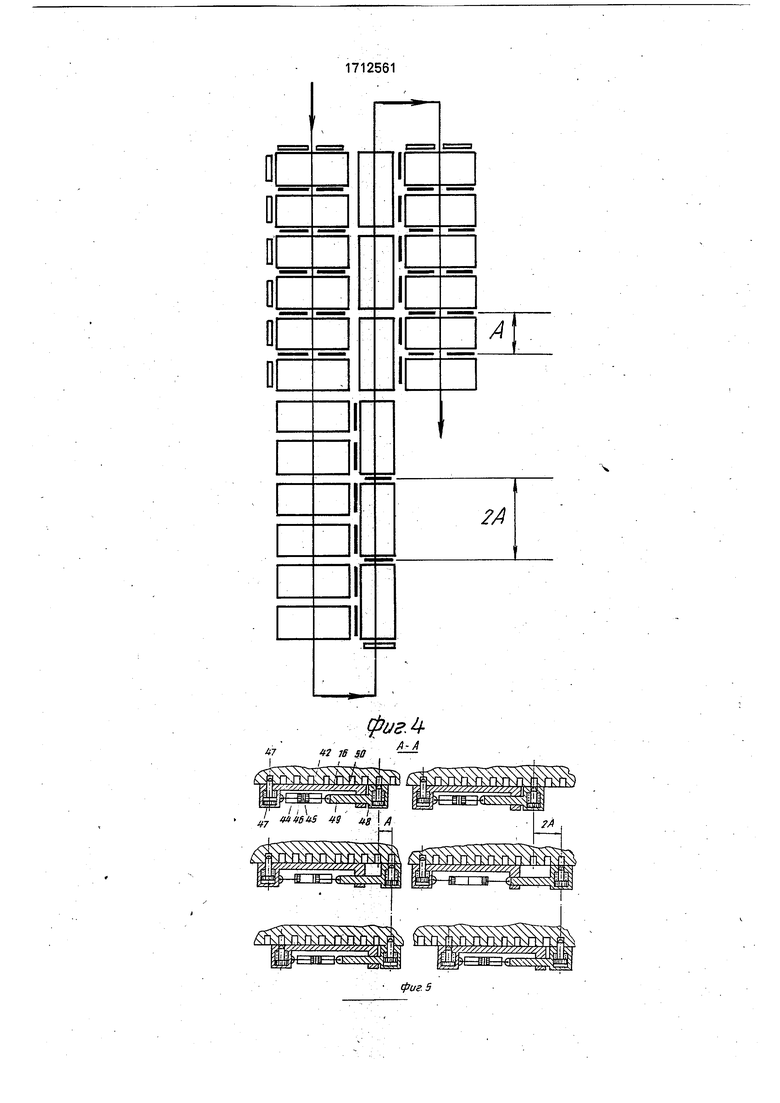
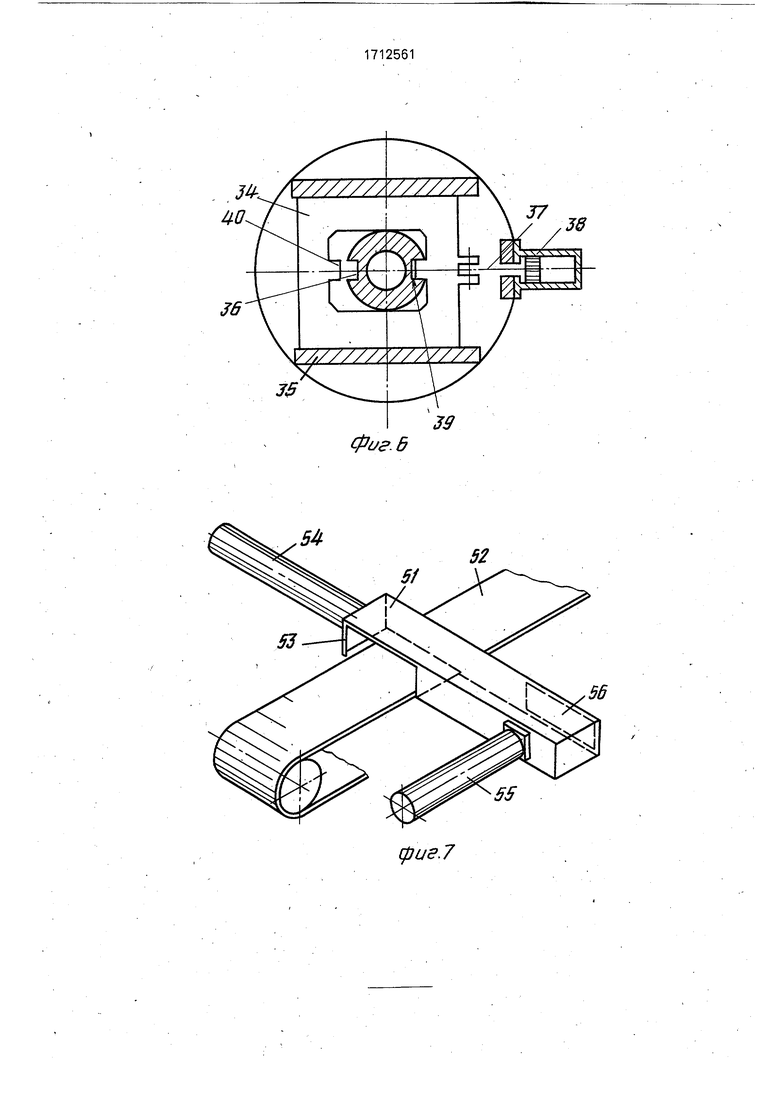
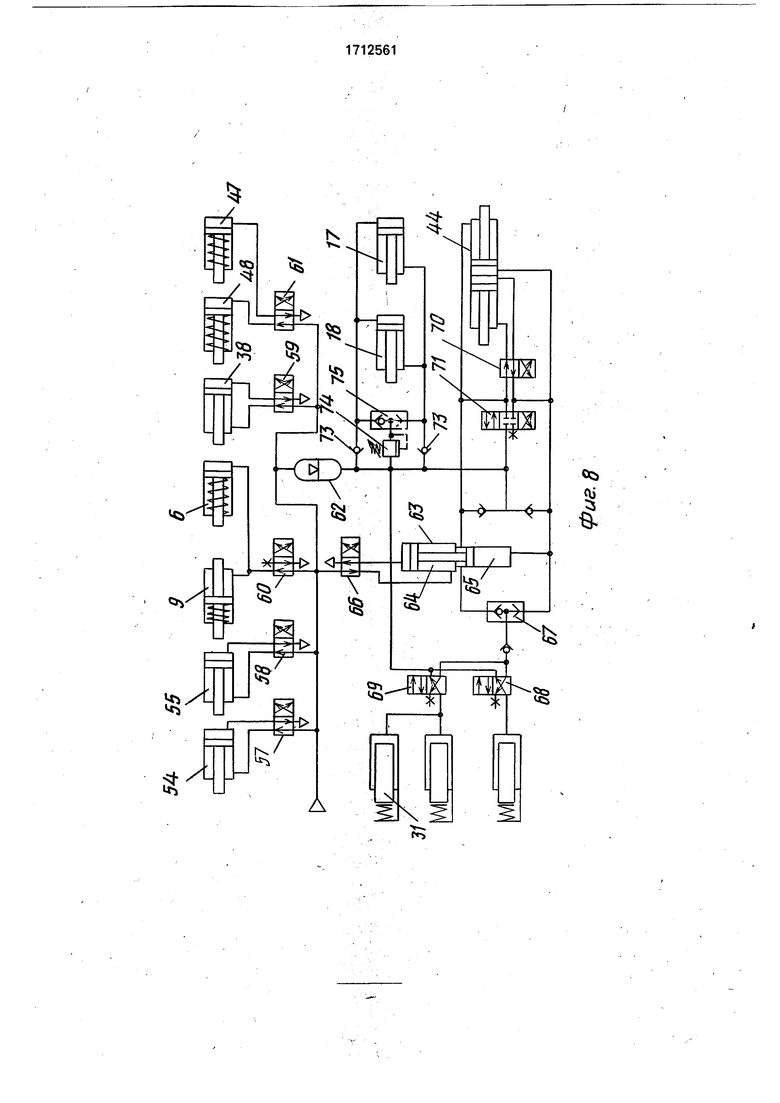
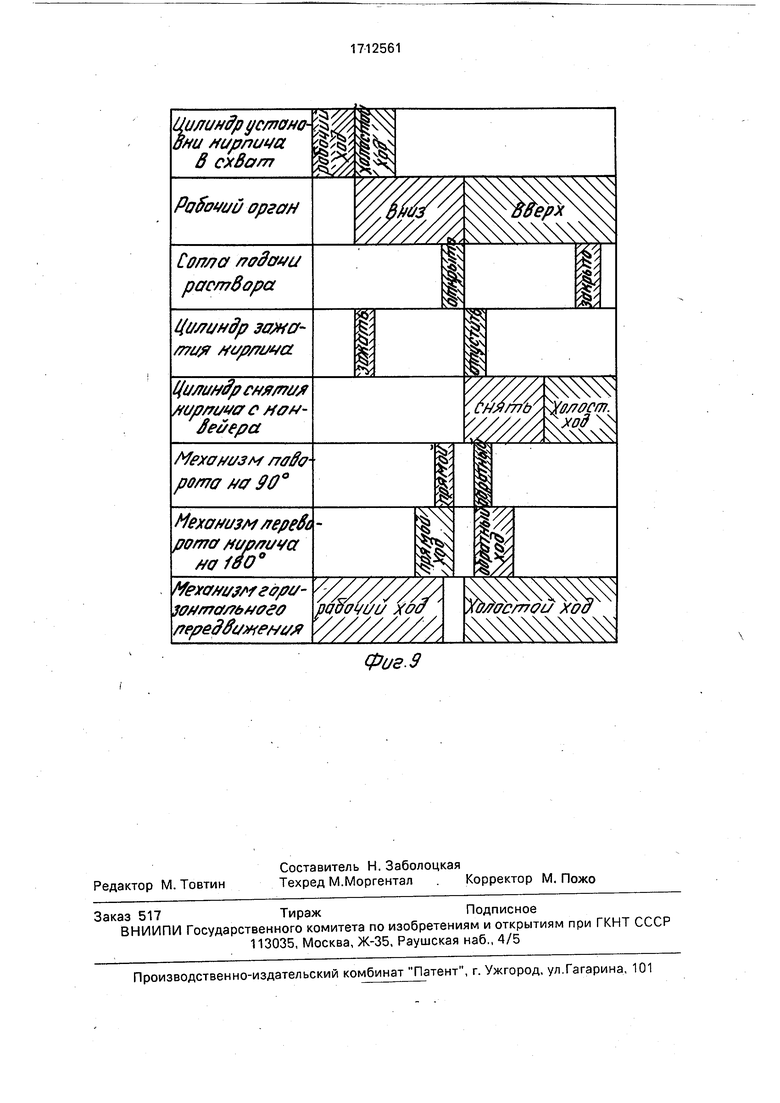
На фиг.1 изображен манипулятор, общий вид; на фиг.2 и 3 - расположение растворопровода и сопел с шиберами; на фиг.4 - схема движения манипулятора при укладке кирпича-на фиг.5 - разрез А-А на фиг.1; на фиг.6 - конструкция механизма поворота захвата на 90°; на фиг.7 - механизм подачи кирпича; на фиг.8 - принципиальная пневмогидравлическая схема управления; на фиг.9 - циклограмма работы манипулятора.
На нижнем конце вертикальной штанги 1 закреплена П-образная скоба 2,внутри которой на подшипниковых опорах 3 смонтирован схват4, выполненный в виде коробчатого элемента 5, внутри которого расположен механизм подачи раствора и поршневой привод 6 зажимного уустройства 7 схвата 4, а верхняя наружная поверхность 8 коробчатого элемента 5 служит приемной площадкой для установки кирпича. Механизм перемещения схвата 4 в вертикальной плоскости представляет собой силовой цилиндр, внутри корпуса 9 которого расположен подвижный поршень 10 с полым штоком 11, ограниченный на конце упорным диском 12, между которым и упорами 13 на корпусе 9 установлена возвратная пружина 14. Пода.ча давления в штоковую полость корпуса 9 цилиндра осуществляется по трубопроводу 15. Внутри полого штока 11 соосно смонтирована штанга 1 с возможностью вращения относительно штока 11. Корпус 9 цилиндра жестко закреплен на каретке 16. являющейся элементом механизма перемещения схвата в горизонтальной плоскости.
Заявленн1ый манипулятор разработан с учетом измененной технологии процесса
кладки стен из кирпича, которая предусматривает подачу кирпича к месту укладки с предварительно нанесенным на его верхнюю постель раствором,.в связи с чем манипулятор должен перевернуть его на 180° раствором вниз.
Для этого манипулятор снабжен механизмом переворота на 180° схвата с кирпичом, который выполнен в виде двух приводов, например, силовых цилиндров 17 и 18 с взаимосвязанной замкнутой гидравлической системой, при которой одним трубопроводом 19 соединены между собой поршневые полости обоих цилиндров 17 и 18, а другим трубопроводом 20 соединенц штоковые полости. Шток 21с помощью кинематических звеньев 22 и 23 соединен с подвижным штоком 11 механизма вертикального перемещения схвата и получает от него импульс на начало работы, а привод 18 является управляемым, осуществляет в этот момент переворот схвата 4 на 180° с помощью другого кинематического звена 24 реечной передачи связывающего подвижный элементшток 25 привода 18 и коробчатый элемент 5 схвата 4.
Пластина 22 укреплена на упорном диске 12 штока 11, а вторая пластина 23 установлена в направляющей 26, жестко связанной с корпусом 9 силового цилиндра, на ней выполнен фигурный паз 27, состоящий из двух крайних прямых участков и среднего наклонного, в котором перемещается палец, закрепленный на штоке 21 привода 17.
Внутри элемента 5 схвата расположен механизм подачи раствора в вертикальные швы, к которому подключен растворопровод 28, начальный участок которого размещен соосно и внутри полой штанги 1, другой участок проходит через П-образную скобу 2 наружу, третий петлеобразный участок подключен через подвижное соединение 29 к коробчатому элементу 5 схвата, а концевой
участок находится внутри элемента 5. Механизм подачи раствора в вертикальные швы выполнен в виде связанных с растворопроводом 28 нескольких сопл 30, часть из которых размещена вдоль ложковой стороны кирпича: а другая - в торце кирпича, и соответствующего количества подпружиненных подвижных цилиндров 31, перемещающихся относительно своих неподвижных штоков и снабженных шиберами 32-, закрепленными каждый на торце цилиндра 31 со стороны, противоположной камере 33 подачи управляющего давления и расположенными в зоне выходного отверстия концевого участка растворопровода 28, для чего последний имеет разветвления по числу используемых сопл 30.
Механизм поворота схвата образован из свободно надетого на нижнюю часть полой штанги 1 подвижного элемента 34, который может перемещаться в направляющих 35 и имеет два симметрично расположенных фиксатора 36. Подвижный -элемент 34 кинематически связан со штоком 37 силового цилиндра 38, корпус которого неподвижно крепится к корпусу 9 силового цилиндра.
Для взаимодействия подвижного элемента 34 со штангой 1 на боковой поверхности последней в зоне расположения фиксаторов 36 выполнены вертикальные направляющие пазы: один 39-прямой, другой 40 - криволинейный. В одном варианте подвижным элементом 34 является пластина с вырезанным прямоугольным окном в центре, по одной оси симметрии которой выполнены симметрично выступы, служащие фиксаторами 36.
По другому варианту подвижный элемент 34 представляет собой скобу, прикрепленную шарнирно к двум симметрично расположенным фиксаторам 36, установленным в направляющих 35. При этом скоба шарнирно присоединена к штоку 37 силового 38.
Для обеспечения возможности поворота полой штанги 1 со схватом, последняя устанавливается на подшипниковых опорах 41, размещенных в полом штоке 11 силового цилиндра механизма перемещения схвата в вертикальной плоскости. Шаг кладки вдоль стены осуществляется с помощью механизма перемещения захвата в горизонтальной плоскости, который состоит из упомянутой ранее каретки 16, перемещающейся по двум разнесенным по высоте направляющим 42 с помощью системы роликов 43, разновысоко установленных на каретке 16 с двух сторон от прикрепленного к ней корпуса 9 силового цилиндра механизма вертикального перемещения схвата и охватывающих нижнюю направляющую 42 с двух сторон, а верхнюю - с трех сторон, что позволяет исключить перекосы и заклинивание манипулятора при его движении вдоль кладки.
Для обеспечения шага движения рабочего органа на каретке 16 установлен сдвоенный силовой цилиндр 44 с глухой
0 перегородкой 45 между поршнями 46. В торце каретки 16 расположен в корпусе фиксирующий элемент 47 в виде подпружиненного поршня, шток которого и выполняет указанную функцию. Снаружи противоположного торца каретки 16 расположен второй фиксирующий элемент48 аналогичной конструкции, корпус которого снабжен ползуном 49, проходящим через направляющую прорезь в каретке 16 внутрь нее и
0 соединенным со штоком одного из поршней 46, тогда как шток второго поршня 46 жестко прикреплен к корпусу фиксирующего элемента 47. При этом на контактирующей поверхности направляющей 42 в диапазоне
5 максимального хода механизма горизонтального перемещения с равным шагом выполнены отверстия 50 под фиксирующие элементы 47 и 4В, шаг которых равен минимальному шагу укладки кирпича А.
0 Механизм подачи кирпича выполнен следующим образом.
К корпусу схвата прикреплен дополнительный коробчатый корпус 51, одна часть которого охватывает транспортер 52, где со
5 стороны входа кирпича выполнено соответствующих размеров окно 53-, а со стороны открытого ближнего торца корпуса 51 установлен силовой цилиндр 54 с толкателем для съема кирпича с транспортера 52, кото0 рый по днищу коробчатого корпуса 51 может перемещаться до упора в закрытый торец корпуса, перпендикулярно которому установлен второй силовой цилиндр 55, осуществляющий подачу кирпича на пло5 щадку схвата, для чего в боковой стенке , корпуса 51 также выполнено окно 56, соответствующее размерам кирпича. Габариты коробчатого корпуса 51 определяютсяразмерами кирпича с тем условием, чтобы
0 стенки и,днище корпуса служили направляющими и обеспечивали правильную траекторию движения и точную установку в захвате. Для управления всеми механизмами и обеспечения возможности выполнения всех требуемых технологических операций по кладке кирпича разработана схема управления, использующая два вида энергоносителя: сжатый воздух и рабочую жидкость под давлением. Гидроцилиндры используются в том случае, когда требуются
малые габариты и большие условия, а именно: в механизме поворота кирпича на 180°, в механизме подачи раствора в сдвоенный цилиндр, в механизме перемещения охвата вдоль кирпича кладки, В остальных механизмах используются пневмоцилиндры. От источника питания самостоятельно управляются через свои распределители 57 и 58 силовые пневмоцилиндры 54 и 55 съема кирпича с транспортера 52 и подачи его на приемную площадку схвата, а через распределитель 59 - силовой пневмоцилиндр 38 поворота захвата на 90°. Пневмоцилиндр 9, осуществляющий перемещения схвата в вертикальной плоскости, и пневмоцилиндр 6 зажимного устройства кирпича управляются от одного распределителя 60 выполнены одностороннего действия с подпружиненными поршнями, при этом штоковая полость цилиндра 9 соединена с поршневой полостью цилиндра 6, что позволяет в процессе подачи давления в цилиндр 9, сжатии пружины 14 и движения схвата вниз усилить прижим зажимного устройства 7 к кирпичу.
Фиксирующие элементы 47 и 48 механизма перемещения схвата вдоль кладки представляют собой пневмоцилиндры одностороннего действия с подпружиненным поршнем, также управляемые одним распределителем 61 и подключенные к его разным секциям, В линии питания пневмосистемы установлен пневмогидропреобразователь 62, выполняющий функцию бака, находящегося под давлением, в гидросистеме управления.
Гидросистема представляет собой замкнутый контур со сдвоенным цилиндром 63 и поршнями.разного диаметра в пневмоцилиндре 64 и в гидроцилиндре 65. Питание сжатым воздухом пневмоцилиндра 64 осуществляется через распределитель 66, Гидроцилиндр 65 через клапан ИЛИ 67 соединен с распределителями 68 и 69, первый из которых управляет работой сопла 30, установленных в торце кирпича, а второй управляет работой двух сопл 30, установленных с ложковой стороны кирпича, Кроме того, гидроцилиндр 65 соединен с одним из цилиндров сдвоенного гидроцилиндра 44 непосредственно, а с другим его цилиндром через распределитель 70, При этом в магистралях, соединяющих пневмогидронасос со сдвоенным гидроцилиндром 44, предусмотрены дополнительный распределитель 71 и обратные клапаны 72 для стабилизации объема рабочей жидкости, поступающей от пневмогидронасоса к сдвоенному гидроцилиндру, а полости гидроцилиндров 17 и 18 помимо связей друг с
другом присоединены через обратные клапаны 73, предохранительный клапан 74 и клапан ИЛИ 75 к гидромагистрали пневмогидропреобразователя 62,
5Манипулятор предлагаемой конструкции
осуществляет свои функции в соответствии с циклограммой по командам, поступающим от управляющего вычислительного блока и датчиков конечных положений подвижных
0 элементов системы (не показаны).
Кирпичи с нанесенным на верхнюю постель раствором подаются к рабочему органу горизонтальным транспортером 52. Кирпич, попадая через окно 53 в коробчатый корпус 51, снимается с транспортера 52 толкателем пневмоцилиндра 54 и перемещается по днищу 51 до упора в закрытый торец напротив другого окна 56, через которое с помощью пневмрцилиндра 55 кирпич
0 подается на приемную площадку 8 схвата до упора в сопла 30.
Стенки корпуса 51 являются направляющими и в сочетании с двумя пневмоцилиндрами 54 и 55 обеспечивают точную и
5 надежную подачу кирпича к охвату манипулятора.
Включением распределителя 60 подается питание одновременно на два пневмоцилиндра 9 и 6: в штоковую полость первого и
0 в поршневую полость второго, в результате чего кирпич в схвате зажимается и шток 11 вместе с схватом совершает рабочий ход вниз.
Одновременно с подачей кирпича на
5 приемную площадку В с свата и рабочим ходом схвата с кирпичом вниз происходит горизонтальное перемещение рабочего органа вдоль кладки на одинарный А или двойной 2А шаг в зависимости от типа клад0 ки(тычкомили ложком).
Перемещение каретки 16 с рабочим органом всегда происходит относительно предварительного зафиксированного по отношению к направляющей 42 ползуна 49,
5 При этом при движении каретки 16 вправо каретка 16 с помощью сдвоенного гидроцилиндра 44 подтягивается к ползуну, а при движении влево соответственно отталкивается. Таким образом работа механизма передвижения рабочего органа состоит из двух ходов: холостого - выдвигание или вытягивание ползуна 49 относительно зафиксированной к направляющей 42 каретки 16 и рабочего - подтягивание или отталкивание каретки 16 относительно зафиксированного ползуна 49.
Изменения направления движения рабочего органа и переключение с холостого хода на рабочий осуществляется с помощью
распределителя 66. При этом пневмогидронасос 63 подает рабочую жидкость в зависимости от положения распределителя 70, либо в разноименные полости цилиндров сдвоенного гидроцилиндра 44, если нуж.но сделать один шаг, либо в одноименные полости, если нужно сделать двойной шаг.
Переключение фиксаторов 47 и 48 осуществляется с помощью распределителя 61.
Рабочий ход штока 11 обеспечивается подачей давления по трубопроводу 15 в штоковую полость цилиндра 9. Вместе со штоком 11 перемещается полая штанга 1 со схватом и упорный диск 12, сжимая при этом пружину 14 и связанную с диском 12 систему шарнирно соединенных пластин 22 и 23, последняя из которых, перемещаясь в направляющих 26 вниз, вызывает перемещение пальца штока 21 в пазу 27, что приводит к перетоку рабочей жидкости из цилиндра 17 в цилиндр 18 и соответствующему движению поршня, шток 25 которого через реечную передачу 24 поворачивает коробчатый элемент 5 с кирпичом на 180°, т.е. вниз на место укладки.
При этом в случае утечек рабочей жидкости полости гидроцилиндров подпитываются через обратные клапаны 73 от гидросистем. Если объем вытесняемой из управляющего цилиндра 17 рабочей жидкости окажется больше объема соответствующей полости управляемого цилиндра 18, то излишки через клапан ИЛИ 75 и предохранительный клапан 74 поступают в гидромагйстраль пневмогидропреобразователя 62.
В процессе движения штанги 1 со схватом вниз (рабочий ход) при необходимости ее поворота в вертикальной плоскости на 90° включением распределителя 59 в нужную позицию подается питание в цилиндр 38, шток 37 вместе с пластиной 34 перемещается и выступ 36 входит в криволинейный паз 40, в результате чего дальнейшее движение вниз штанги 1 приводит к ее повороту вокруг вертикальной оси. Если поворот охвата не требуется, пластина 34 перемещается в противоположную сторону, при этом второй выступ 36 входит в прямолинейный паз 39.
В конце хода штанги 1 вниз поступает сигнал на выключение распределителей 6,8 и 69. Рабочая жидкость, попадая в камеру 33, перемещает подпружиненный цилиндр 31 и прикрепленный к нему шибер 32 и обеспечивает подачу раствора через сопла 30 от растворопровода 28 к вертикальным швам кладки. Включением распределителя 68 или 69 или обоих сразу может быть достигнута соответствующая комбинация подачи раствора.
Кирпич укладывается на место, прижимается раствором к предыдущему ряду кладки и в гидросхему поступает команда от управляющего вычислительного блока на
обратный ход всех механизмов рабочего органа.
Сначала открывается зажимное устройство 7 схвата, которое прекращает фиксироать кирпич, затем отключается питание
пневмоцилиндра 9 и шток 11 со штангой 1 под действием пружины 14 поднимается, при этом через сопла 30 происходит заполнение раствором вертикальных швов. При дальнейшем движении штанги 1 вверх сопла 30 выходят из полости вертикальных Щвов, шибера 32 перекрывают подачу раствора, срабатывает в обратном направлении механизм поворота на 180°, устанавливая коробчатый элемент 5 с опорной площадкой в
исходное положение, необходимое для приема следующего кирпича. Одновременно включается механизм поворота, возвращающий штангу 1 с захватом также в исходное положение. Цикл повторяется.
Применение рабочего органа манипулятора для кладки кирпича, сочетающего в себе механизмы по ориентации, позиционированию с фиксацией кирпича на месте кладки и механизм подачи раствора для одновременного заполнения вертикальных швов, позволит повысить эффективность выполняемых работ.
Формула изобретения
этом каретка снабжена механизмом подачи кирпича с транспортера и схвату.
прикреплен к торцу каретки, имеющему заключенный в корпус подпружиненный фиксатор, а другой шток оснащен подвижным относительно каретки ползуном с установленным на его конце фиксатором, при этом на контактирующей поверхности направляющей образованы отверстия под фиксирующие элементы, шаг которых соответствует наименьшему шагу укладки,
выполнены направляющие пазы, а корпус силового цилиндра подъема и опускания схвата оснащен соединенными с цилиндром поворота схвата пальцами с возможностью поочередной установки в соответствующие пазы штанги.
Фиг. 2
фиг- д
1В SO
/..-д
Jfg
фигЛ
А-А
31 / 777772.
0
j$
38
фиг.д
52
gjueJ
«О
15
Р
tf)VCi
/
N
f
у
KK
а
X
3-F
:
к
X
Г
ФХ «
А
К
N
И
Ось
55
.
f т
/
г
а
1С
-6
5
К
. г«
Liuflunffp yc/7JOHoOMU u/ynut/a В ex Bam
Po$ot/i/u орган
COf7/7a /7i7dOffU
раствора
iif//7ijHdp
/fa/ffft/f a с / г7// ei/epa
Me) nffff 7 po/r7ff //ff
Механизм/repeBi
poma c/ff/7U a //fffio
paoai i/u )(oi
У////////А
OC/rrCLf XO.
$$$$i $$$m
Фие-З
| Машина для кладки кирпича | 1982 |
|
SU1133365A2 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Манипулятор для кладки кирпичных стен и блоков | 1985 |
|
SU1276783A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
