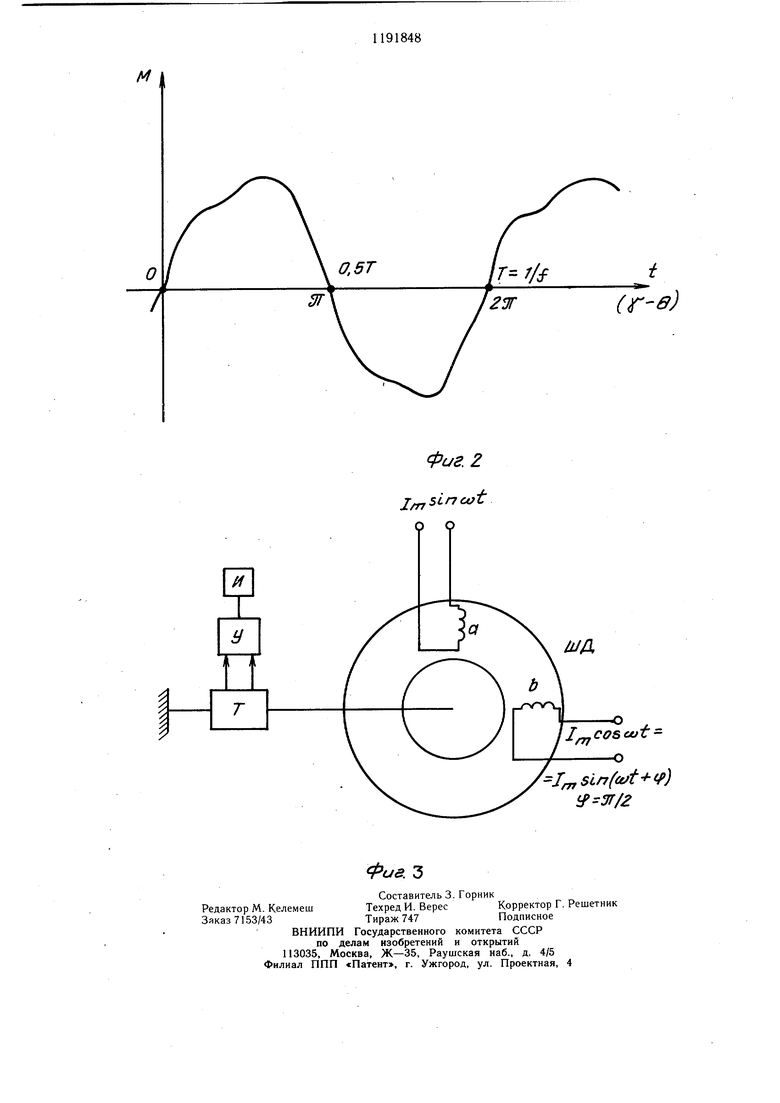
Изобретение относится к электротехнике, а именно к измерению характеристик шаговых электродвигателей, и может быть использовано при исследовании и проведении контрольных испытаний шаговых электродвигателей в процессе производства. Целью изобретения Является повышение точности измерения. На фиг. 1 схематично показан метод измерения угла рассогласования между полем статора и ротором; на фиг. 2 - вид моментной характеристики, регистрируемой с помош,ью торсиометра; на фиг. 3 - пример устройства для реализации способа. Сущность способа рассмотрим на примере двухфазного ШД с разнополярной четырехтактной коммутацией фаз. На фиг. 1 изображен ротор с продольной осью а и две фазы статора а и Ь, расположенные вдоль взаимно перпендикулярных осей d и ;3 . Там же изображен результируюш,ий вектор поля статора, т. е. его 1),Взяв за начало отсчета углов ось а, получим, что угловое положение ротора определяется углом 6 const. Угловое положение результирующего вектора поля статора 7- При питании фазы а током а Im Sinwt, а фазы 6 током ь Im COSwt, где Im - амплитуда тока, - угловая частота, пропорциональная частоте f изменения токов фаз, получим равномерное врашение вектора F(7) и изменение угла 7 пропорционально круговой частоте, т. е. . Угол Harpy3KH(Y-б), т. е. угол рассогласования между осью поля статора и осью ротора, при этом также будет плавно изменяться, циклически (с периодом 2п рад) повторяя свои значения. За время изменения угла (у-6) от О до 2п момент взаимодействия М между ротором и статором также проходит цикл своего изменения (фиг. 2). Воздействуя на измеритель, например торсиометр, он вызывает пропорциональный электрический сигнал, который во временной развертке и даст в соответствующем масштабе угловую моментную характеристику ШДМ (Y-0), так как при равномерном вращении поля статора угол (Y-S ) пропорционален времени. Примером устройства для реализации рассматриваемого способа может служить устройство по схеме, изображенной на фиг. 3. Обмотки а и b 2-х фазного индукторного ШД с закрепленным неподвижно статором запитывают токами щ sincot и Imcoscot Imsin(-(ot-f ф), где ф -Еу- фазный угол сдвига. Вал двигателя через измеритель момента, например торсиометр Т, закреплен относительно статора. Переменный момент взаимодействия поля статора и ротора воспринимается торсиометром Т, электрический сигнал с которого усиливается усилителем У и фиксируется на индикаторе И, например осциллографе, в виде (t)M(Y-в). Масштаб по оси абсцисс определяется по перирду С кривой M(t), так как 1 соответствует пространственному углу 2л. Масштаб по оси ординат определяется тарировкой торсиометра. Вал двигателя может быть фиксирован и непосредственно, если применяются измерители момента, основанные на бесконтактном измерении скручивания вала. например оптические устройства или иные. Повышение точности достигается тем, что момент взаимодействия статора и ротора в динамике М есть разность электромагнитного момента Мэл.мИ составляюш,их момента, пропорциональных потерям мощности А Р М кМй1.«-АР(со«) АР АРц+АРвр+ЛЕд где АРк - потери в стали магнитопровода, вызванные периодическим изменением магнитного потока при коммутации фаз; АРйр - потери в стали магнитопровода, вызванные периодическим изменением магнитного потока при вращении зубчатого ротора в магнитном поле статора; АРмех - механические потери; (им - угловая скорость ротора. В двигателе с пассивным ротором наибольшую долю в потерях АР составляют потери АРк, так как амплитуда колебаний магнитного потока (индукции) при коммутации фаз в (4+5) раз превышает амплитуду колебания магнитного потока при вращении зубчатого ротора в магнитном поле статора, а с учетом квадратичной зависимости потерь в ртали от амплитуды колебаний магнитной индукции ARj. (16-25)АРвр. Что касается потерь АРмех., то при сравнительно низких для шагового электродвигателя значениях сом и при обычно хорошем качестве опор вращения эти потери пренебрежимо малы. Учет потерь в стали шагового электродвигателя в предложенном способе повышает точность на 10-20% в области низких скоростей и до 50% в области высоких.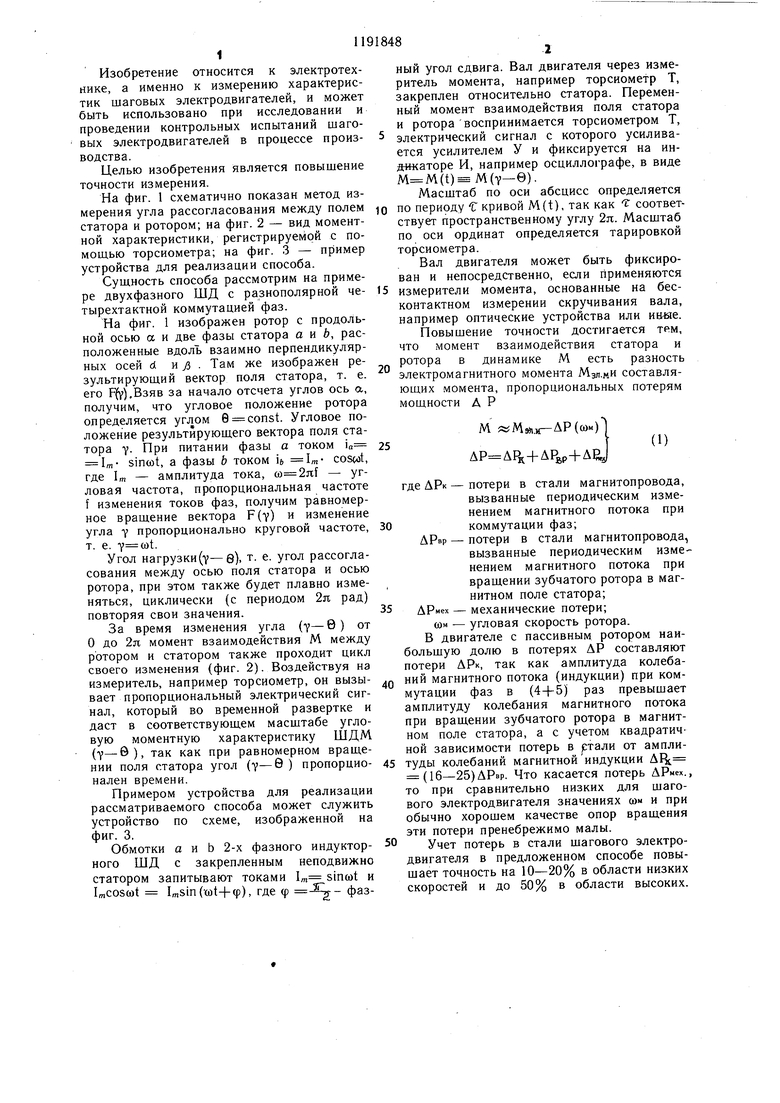
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| Стенд для измерения угловых моментных характеристик шаговых электродвигателей | 1987 |
|
SU1636813A1 |
| Способ настройки моментного вентильного электродвигателя | 1987 |
|
SU1495944A1 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С КОРОТКОЗАМКНУТОЙ ОБМОТКОЙ РОТОРА | 1997 |
|
RU2153755C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Устройство для управления шаговым электродвигателем | 1981 |
|
SU1032584A2 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| ГИРОСКОП | 2019 |
|
RU2728733C1 |
| Моментный вентильный электродвигатель | 1983 |
|
SU1170565A1 |
СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ МОМЕНТНОЙ ХАРАКТЕРИСТИКИ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ путем возбуждения обмоток статора и регистрации момента, возникающего между ротором и статором, по угловому отклонению между статором и ротором, отличающийся тем, что, с целью повышения точности, статор возбуждают многофазной системой токов, число фаз которой равно числу фаз обмотки статора,а ротор закрепляют относительно статора посредством упругого элемента, например торсиометра. . 1 F(r}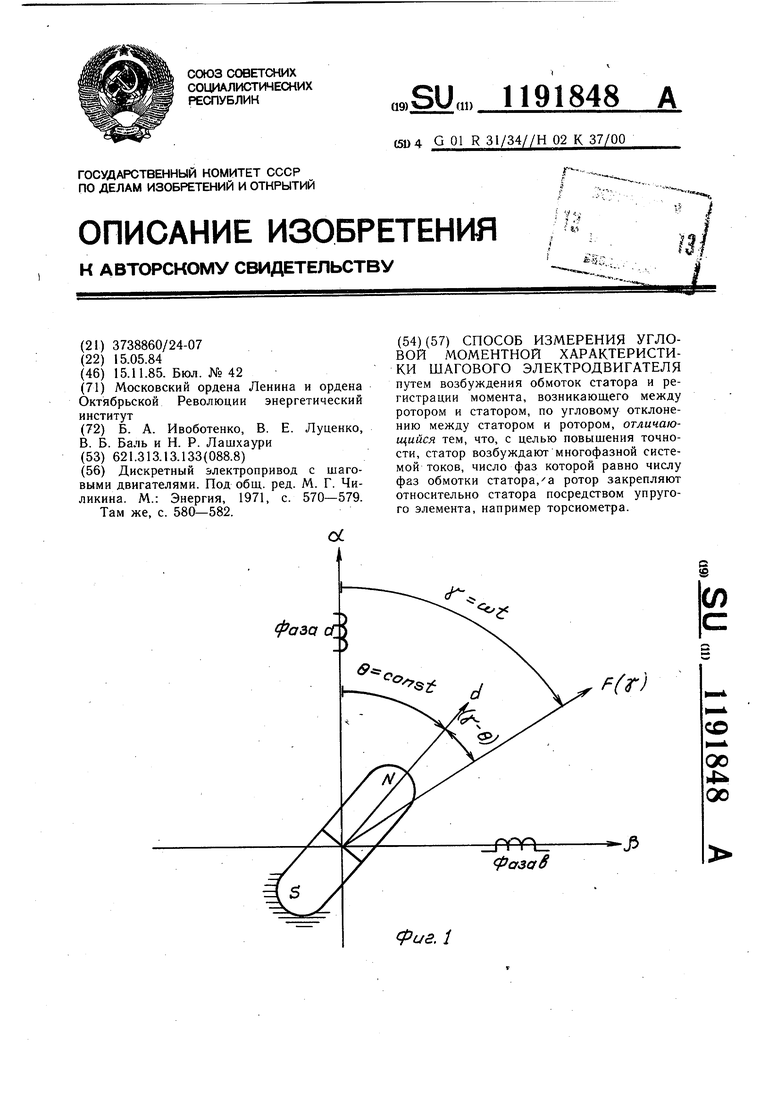
| Дискретный электропривод с шаговыми двигателями | |||
| Под общ | |||
| ред | |||
| М | |||
| Г | |||
| Чиликина | |||
| М.: Энергия, 1971, с | |||
| Секретный замок | 1923 |
|
SU570A1 |
| Там же, с | |||
| Дисковая паровая турбина | 1922 |
|
SU580A1 |
