цифроаналогового преобразователя яв- запоминающего устройства является ляется аналоговым выходом блока но- дискретным выходом блока моделироваделирования запаздывания, а выход ния запаздывания.
1174902
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Адаптивная система управления для объектов с запаздыванием | 1983 |
|
SU1161917A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Адаптивная система управления для объектов с запаздыванием | 1989 |
|
SU1689920A1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Устройство для управления статическим тиристорным компенсатором | 1985 |
|
SU1309175A1 |
1.АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая последовательно соединенные задатчик, сравнивающий элемент и экстремальный регулятор, подключенный выходом к входу объекта управления, состояп{его из последовательно соединенных опережающего и инер- ционного звеньев, аналого-цифровой преобразователь, соединенный первым входом с выходом объекта управления, последовательно соединенные блок определения коэффициентов усиления, первый цифроаналоговый преобразователь и первое форсирующее звено, подключенное вторым входом к выходу опережающего звена объекта и к первому -входу второго форсирующего звена, соединенного вторым входом с первым входом первого форсирующего звена, причем второе форсирующее звено соединено выходом с вторым входом сравнивающего элемента,третий и четвертый входы которого подключены соответственно к выходу объекта управления и к аналоговому выходу блока моделирования запаздывания, отличающаяся тем, что, с целью расширения области применения и повышения точности, в нее введены блок определения запаздывания, двоичный счетчик адреса и дешифратор, подключенный выходом к шине сброса двоичного счетчика адреса, информационные выходы которого соединены с первым выходом блока определения запаздывания и первым входом блока моделирования запаздывания. Второй вход которого подключен к выходу двоичного счетчика адреса и первому входу -дешифратора, соединенного вторым входом с вторым входом блока определения запаздывания, ана с логовый выход блока моделирования запаздывания подключен к. первому вхо(Л ду блока определения запаздывания, С второй вход которого соединен с выходом объекта управления, дискретный выход блока моделирования запаздывания подключен к второму входу блока определения коэффициентов, выход аналого-цифрового преобразова: теля соединен с третьим входом блока моделирования запаздьшания, а выход первого форсирующего звена соединен с вторьм входом аналого-цифрового преобразователя. 2. Система по п..1, отличающаяся тем, что блок.моделирования запаздьшания содержит последовательно соединенные формирователь, запоминающее устройство и второй цифроаналоговый преобразователь, причем вход формирователя является первым входом блока моделирования запаздывания, второй и третий входы запоминающего устройства являются соответственно вторым и третьим входами блока моделирования запаздывания, выход второг
I
Изобретение относится к самонастраивающимся системам управления и может быть использовано для автоматизации технологических процессов с постоянным и изменякяцимся в широком диапазоне запаздыванием и коэффициентом усиления, в частности для автоматизации управления тепловыми прО цессами энергоблоков.
Цель изобретения - расширение области применения и повышение точности.
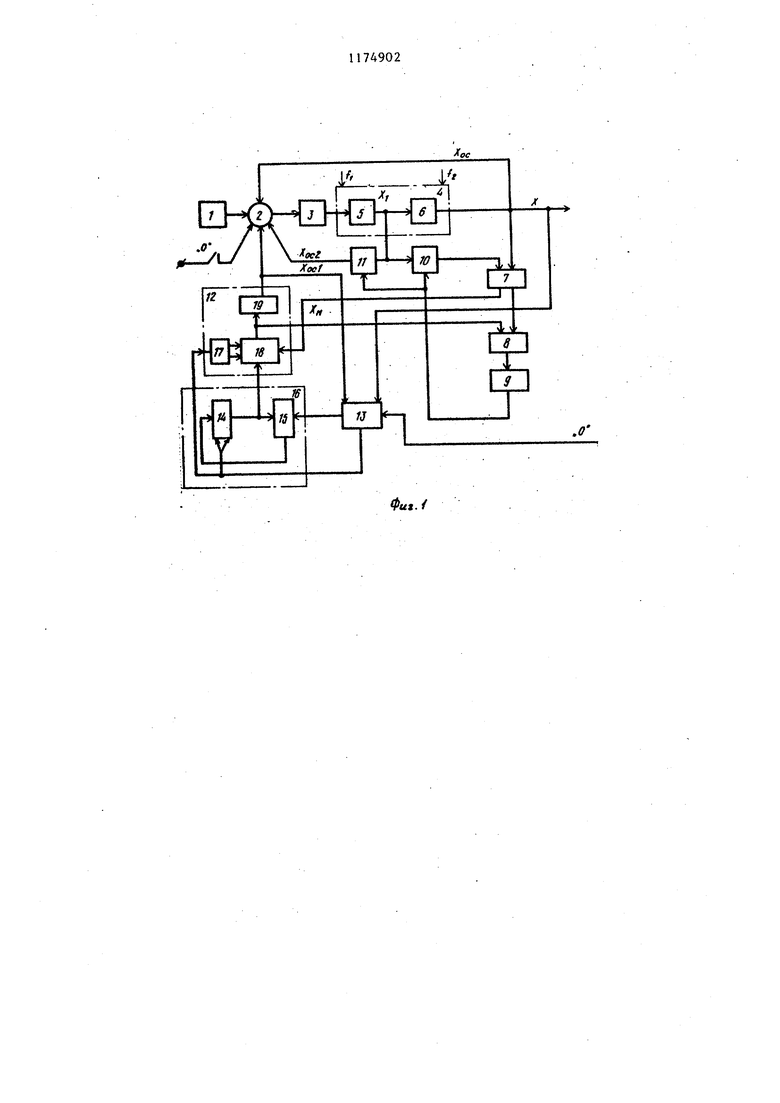
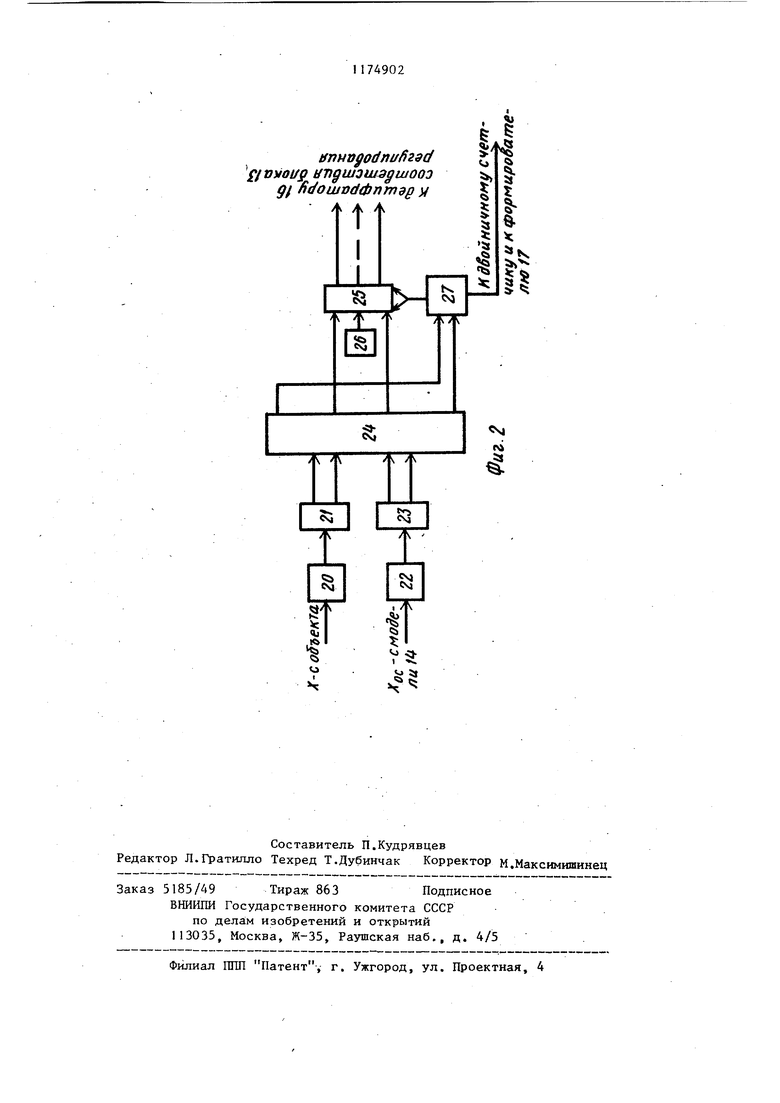
На фиг.1 приведена структурная схема адаптивной системы управления где X - регулирующее воздействие; X - регулируемая величина; У, ос соответственно сигналы основной обратной .связи, компенсации инерционности и упреждения запаздывания; О - оператор; на фиг.2 - схема определеиия запаздывания.
Система содержит задатчик 1 , сравнивающий элемент 2, экстремальный регулятор 3, объект 4 управления, состоящий ИЗ опережающего 5 и инерционного 6 звеньев, аналогоцифровой преобразователь 7, блок 8 определения коэффициентов усиления, цифроаналоговый преобразователь 9, первое и второе форсирующие звенья 10 и 11,блок 12 моделирования запаздывания, блок 13 определения запаздывания, двоичный счетчик 14 адреса и дешифратор 15, образующие блок 16 регулирования.
Блок 12 моделирования запаздывания содержит формирователь 17,запоминающее устройство 18 и второй цифроаналоговый преобразователь 19.
Блок 13 определения запаздывания содержит первый усилитель 20, первый триггер 21, второй усилитель 22, второй триггер 23, второй дешифратор 24, счетчик 25, задатчик 2f запаздывания и управляюищй генератор 27.
Система работает следующим образом.
Сложный объект, в частности, содержащий опережающее и инерционное звенья, с достаточной степенью точности может быть аппроксимирован передаточными функциями
оп
(1)
()( ТОПР -
-рГз
Ли - (г)
(( .1 где W(p)W; К„и.К„, Тр„и Т ; (,„ и (Э(,„ , Тд И Т - коэффициенты усиления, большие постоянные времени и меньшие постоянные времени, эквивалентные постоянные времени соответственно опережающего и инерционного звеньев 5 и 6 объекта; з время запаздывания объекта.
Инерционность объекта обусловлен большой величиной эквивалентной постоянной времени инерционного участка объекта
(3)
Т,,ь, Т....+ 6.,
ин ин Из фиг.1 видно, что
X(P)XOC(P)X(P)W,«W,H; (4) X«ip)Xp(p)WonW,,, J (5)
(p)Xp(p4nW,2 (6)
где W и соответственно передаточные функции первого и второго форсирующих звеньев 10 и II.
Условие компенсации инерционности имеет вид
(7)
К V1 ин
при равенстве эквивалентных постоянных.
Второе форсирующее звено обычно является моделью объекта или моделью части объекта. Из критерия оптимальной отработки внутренних возмущений f со стороны регулирующего органа передаточная функция второго форсирующего ззена 11 может быть выбрана, например, равной коэф фициенту усиления инерционного участка 6 объекта, т.е. V2 Таким образом, адаптивная подстройка параметров системы должна производиться в соответствииС выражениями (7) и (8), При этом все неточности моделирования запаздывания , различные изменения объекта при эксплуатации и несоответствие эквивалентных постоянных времени Относятся к несовпадению их коэффициентов усиления. Параметры собственно регулятора 3 могут быть оптимизированы, например, исходя из известного компенсационного метода, при котором э 2К э TH Топ где Кр и Т - коэффициент усиления . время изодрома ПИ-регулятора. В исходном состоянии системой произведена отработка задания, поступающего с задатчика 1. При этом в блоке 13 определения запаздывания фиксируется код времени запаздывания для модели 12 запаздывания. Это код задает цикл работы блоку 16 регулирования, формирующему с помощью двоичного счетчика 14 адреса и дещифратора 15 соответствия набор адресов для запоминающего устройства 18 блока 12. Работа двоичного счетчика 14 адреса синхронизируется с работой запоминающего устройст ва 18 импульсами выхода опорной частоты блока 13 определения запазд вания. В результате в каждом цикле по адресу, сформированному в двоичном счетчике 14, через формирователь 17 производится считывание информации, относящейся к моменту вре мени (t: -Тщ), которая через цифро аналоговый преобразователь 19 подается на второй (суммирующий) вход сравнивающего элемента 2. По окончании считывания в за-аоминающее устройство 18 по этому адресу запис вается новая информация, поступающая на его информационные .входы с выходов aнaлoгo-цифpoвo o преобразователя 7. При следующем импульсе с выхода опорной частоты блока 13 определения запаздывания аналогичным образом по очередному адресу считывается информация, относящаяся к моменту времени (tj -Т) + Ту,, и т.д. до (tj- - tj,после чего начинается следующий ()-й цикл. в блоке 13 определения запаздывания измеряется величина запаздыва- ния Tj, объекта для блока 12 по форму м («Г м )-м КоСпГм(п-1|| 1 где tj- величина запаздывания,установленная оператором в счетчике 25 через задатчик 26 перед началом работы; (n-l) и (п) - предыдущий и очередной циклы адаптации; М - модель. В блоке 13 определяется изменение значений C:;, tj , t и на его выходе фиксируется новое значение времени запаздывания. Это, в свою очередь, приводит к изменению текущего коэффициента пересчета двоичного счетчика 14 адреса, а-следовательно, времени Гд. Блок 7 определения коэффициентов как в статике,так и в динамике, с частотой работы аналого-цифрового преобразователя 7 находит значение коэффициентов усиления формирующих звеньев 10 и 11, которые подстраиваются через первый цифроаналоговый преобразователь 9. При этом в динамике за счет непрерывной адаптивной подстройки учитываются все различия между объектом и моделью. . .... При изменении задания, при подаче единичного скачка или при возмущении работа системы осуществляется по трем контурам, причем система сохраняет высокое быстродействие и качество работы, так как обеспечивается условие ее адаптации к изменению времени запаздьгоания и коэффициента усиления, являющихся основными параметрами объекта, независимо от причин,которые их вызывают.
| Система управления для объектов с запаздыванием | 1977 |
|
SU648947A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивная система управления для объектов с запаздыванием | 1980 |
|
SU1015336A1 |
