Изобретение относится к электротехнике, а именно к электроприводам с упругой связью между электродвигателем и механизмом, и может применяться в электроприводах лифтов, подъемников, кранов, экскаваторов, испытательных стендов, бумагоделательных машин, манипуляторов.
Цель изобретения - упрощение электропривода и повышение эффективности демпфирования колебаний в упругой связи.
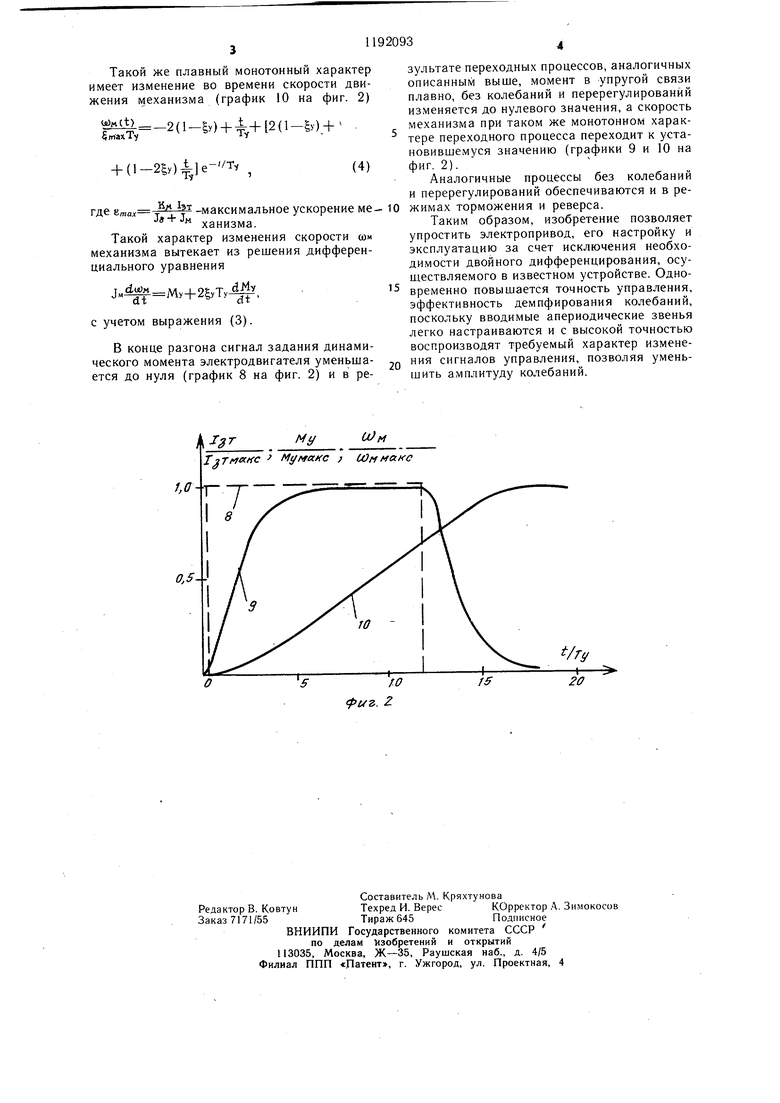
На фиг. 1 приведена схема электропривода; на фиг. 2 - графики, характеризуюш,ие его работу.
Электропривод с упругой связью 1 между электродвигателем 2 и механизмом 3 содержит подключенный к якорной цепи электродвигателя 2 регулируемый источник 4 тока (например, контур регулирования тока и момента электродвигателя с включенным в якорную цепь двигателя преобразователем), включенный на входе последнего блока 5 задания тока (например, регулятор внешнего контура регулирования скорости или напряжения), а также включенные последовательно инвертирующие апериодические звенья 6 и 7, при этом вход первого апериодического звена 6 соединен с выходом блока 5 задания тока, а выходы обоих апериодических звеньев 6 и 7 подключены к входу регулируемого источника 4 тока.
На фиг. 2 график 8 характеризует изменение во времени сигнала задания тока (момента) электродвигателя, график 9 - изменение момента нагрузки в упругой связи, а график 10 - изменение скорости движения механизма в режиме разгона при применении изобретения.
Электропривод работает следующим образом.
В начале переходного режима (здесь разгона) на выходе блока 5 появляется сигнал 1зт задания тока (момента) электродвигателя, который поступает на вход регулируемого источника 4 тока и на вход инвертирующего апериодического звена 6, выходной сигнал которого изменяется по экспоненциальному закону.
и„, -Ьт(1--е--/ О,(1)
где .- постоянная времени
vnс{ S+M связи;
с- жесткость упругой связи;
Ju, JM-- моменты инерции двигателя и механизма,
и является отрицательным (при положительном входном сигнале).
Выходной сигнал первого инвертирующего апериодического звена б подается на входы регулируемого источника 4 тока и второго инвертирующего апериодического звена 7, постоянная времени которого выбирается, как и у первого апериодического звена 6, равной постоянной времени упругой связи Ту. В результате на выходе второго апериодического звена, подключенного к входу регулируемого источника 4 тока, появляется сигнал положительного знака, изменяющийся по закону экспоненты второго порядка
5 и,2 + (1+4-,)е- 1.
(2)
Таким образом, на входе регулируемого источника 4 алгебраически складываются три сигнала: положительный сигнал задания тока 1зт с выхода блока задания 5; изменяющийся по закону экспоненты первого порядка отрицательный сигнал (1) с выхода первого инвертирующего апериодического звена 6 и изменяющийся по закону экспоненты второго порядка положительный сигнал (2) с выхода второго инвертирующего апериодического звена 7. При этом передаточный коэффициент регулируемого источника 4 тока по входу от блока 5 задания тока выбирается равным единице, а по входам от двух инвертирующих апериодических
0 звеньев 6 и 7 - равным 2(1-gy), где |у - относительный коэффициент затухания упругой связи (в случае противоположного знака выходного сигнала блока 5 задания тока меняют знаки и другие сигналы).
При этом обеспечивается монотонный характер изменения момента My в упругой связи без колебаний и перерегулирований, определяемый зависимостью (график 9 на фиг. 2)
WyLt) 1 - (1 о-± )
(3) Яутм- Ту
где My ma,v I Kv-y -:;максимальное зна чение момента нагрузки в упругой связи, определяемое допустимой величиной ускорения механизма; - коэффициент пропорциональностимежду током и .моментом электродвигателя.
Такой характер изменения момента в упругой связи определяется решением дифференциального уравнения, описывающего динамику процесса с учетом действия трех входных сигналов, указанных выше, если не учитывать инерционность регулируемого источника 4 тока, что в большинстве случаев вполне допустимо вследствие малости его постоянной времени по сравнению с постоянп ной времени упругой связи, с тому же инерционность этого контура не является существенной для эффективности демпфирования колебаний
т2 , OS..т.. d-My4 МУ-iy dt
Му„„,(1-|у)(1-е-/г)4-f2(l-|y)l-(l+)e-/Tv |. Такой же плавный монотонный характер имеет изменение во времени скорости движения механизма (график 10 на фиг. 2) ( + 4+12(1-1.) ++ (l-2Ey) где Ктах т Л. т -мзксимальное ускорение ме ханизма. Такой характер изменения скорости шм механизма вытекает из решения дифференциального уравнения Л„ | Му+2|уТу, с учетом выражения (3). В конце разгона сигнал задания динамического момента электродвигателя уменьшается до нуля (график 8 на фиг. 2) и в результате переходных процессов, аналогичных описанным выше, момент в упругой связи плавно, без колебаний и перерегулирований изменяется до нулевого значения, а скорость механизма при таком же монотонном характере переходного процесса переходит к установившемуся значению (графики 9 и 10 на фиг. 2). Аналогичные процессы без колебаний и перерегулирований обеспечиваются и в режимах торможения и реверса. Таким образом, изобретение позволяет упростить электропривод, его настройку и эксплуатацию за счет исключения необходимости двойного дифференцирования, осуш,ествляемого в известном устройстве. Одновременно повышается точность управления, эффективность демпфирования колебаний, поскольку вводимые апериодические звенья легко настраиваются и с высокой точностью воспроизводят требуемый характер изменения сигналов управления, позволяя уменьшить амплитуду колебаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА ДЛЯ УПРАВЛЕНИЯ ОБЪЕКТОМ С УПРУГИМИ СВЯЗЯМИ | 2011 |
|
RU2489797C1 |
| Устройство для регулирования тока якоря электродвигателя | 1976 |
|
SU656169A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| Электропривод с упругой механической связью между электродвигателем и механизмом | 1984 |
|
SU1277330A1 |
| Регулируемый электропривод | 1980 |
|
SU957397A1 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| Электропривод постоянного тока | 1981 |
|
SU1001409A1 |
| Электропривод с упругой механической связью | 1984 |
|
SU1275723A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
ЭЛЕКТРОПРИВОД С УПРУГОЙ СВЯЗЬЮ МЕЖДУ ЭЛЕКТРОДВИГАТЕЛЕМ И МЕХАНИЗМОМ, содержащий подключенный к якорной цепи электродвигателя регулируемый источник тока с включенным на входе последнего блоком задания тока, отличающийся тем, что, с целью упрощения электропривода и повышения эффективности демпфирования колебаний в упругой связи, в него введены два последовательно включенных инвертирующих апериодических звена, вход первого из которых соединен с выходом блока задания тока, а выходы указанных инвертирующих апериодических звеньев подключены к входу регулируемого источника тока. фие. 1 (Л СО N5 О СО оо
А 7
My
T Tn«tfc Mi/ffaKc j Юм макс
f.ff0,520
| КАТОДОЛЮМИНЕСЦЕНТНАЯ ИЗЛУЧАЮЩАЯ ЛАМПА | 2003 |
|
RU2260224C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4027745, кл | |||
| Индукционная катушка | 1920 |
|
SU187A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
