2.Захват по п.1 отличающийся тем, что упругие элементы выполнены S-образными,
3.Захват по п.1, о т л и ч а ю щ и и с я тем, что упругая система выполнена в виде сильфонов, каждый из которых одним концом соединен с коллектором, а другой герметизирован заглушкой, на наружной поверхности которой закреплена эластичная губка, причем оси сильфонов расположены в плоскости, перпендикулярной оси захвата..
Z971
4.Захват попп. 1 и2, отли чающийся тем, что упругие элементы расположены в плоскостях, проходящих через ось захвата.
5.Захват по пп. 1 и 2, отли чающийся тем, что упругие элементы расположены в плоскости, перпендикулярной оси захвата.
6.Захват по п.1, отличаю щ и и с я тем, что коллектор связан с приводом, подвижным в осевом направлении.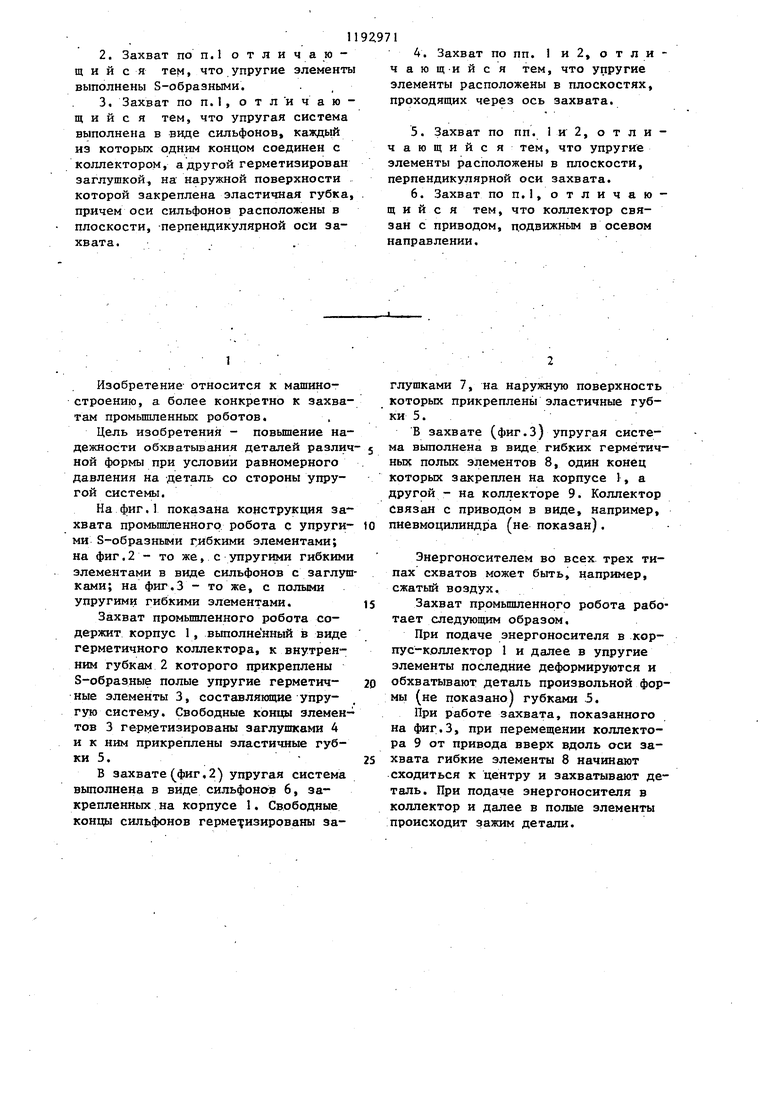
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1987 |
|
SU1426784A1 |
| Схват промышленного робота | 1987 |
|
SU1442399A1 |
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Очувствленное захватное устройство | 1989 |
|
SU1743857A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ОРИЕНТАЦИИ ДЕТАЛЕЙ | 1992 |
|
RU2008196C1 |
| Захват промышленного робота | 1981 |
|
SU971648A2 |
| Сильфонный привод криволинейного перемещения | 2022 |
|
RU2785181C1 |
| Схват робота | 1986 |
|
SU1445949A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
1. ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА, содержащий корпус, привод и ут1ругую приводную систему, отличающийся тем, что, с целью повьппения надежности обхватывания деталей различной формы при условии равномерного давления на Деталь со стороны упругой системы, он снабжен герметичным коллектором, а упругая приводная система выполнена в виде полых герметичных упругих элементов, одни концы которых закреплены на коллекторе.
1
Изобретение относится к мгипиностроению, а более конкретно к захватам промышленных роботов.
Цель изобретения - повьшение надежности обхватывания деталей различ ной формы при условии равномерного давления на деталь со стороны упругой систе1 « 1.
На фиг.1 показана конструкция захвата промьппленногр робота с упругими S-образными гибкими элементами; на фиг.2 - то же, с упругими гибкими элементами в виде сильфонов с заглушками; на фиг.З - то же, с полыми упругими гибкими элементами.
Захват промьшшенного робота содержит корпус 1 , выполненный в виде герметичного коллектора, к внутренним губкам 2 которого прикреплены S-образные полые упругие герметичные элементы 3, составляющие упругую систему. Свободные элементов 3 герметизированы заглушками 4 и к ним прикреплены эластичные губки 5.
В захвате(фиг,2) упругая система выполнена в виде сильфоно в 6, закрепленных на корпусе 1, Свободные концы сильфонов герме изиррваны заглушками 7, на наружную поверхность которых прикреплены эластичные губки 5 .
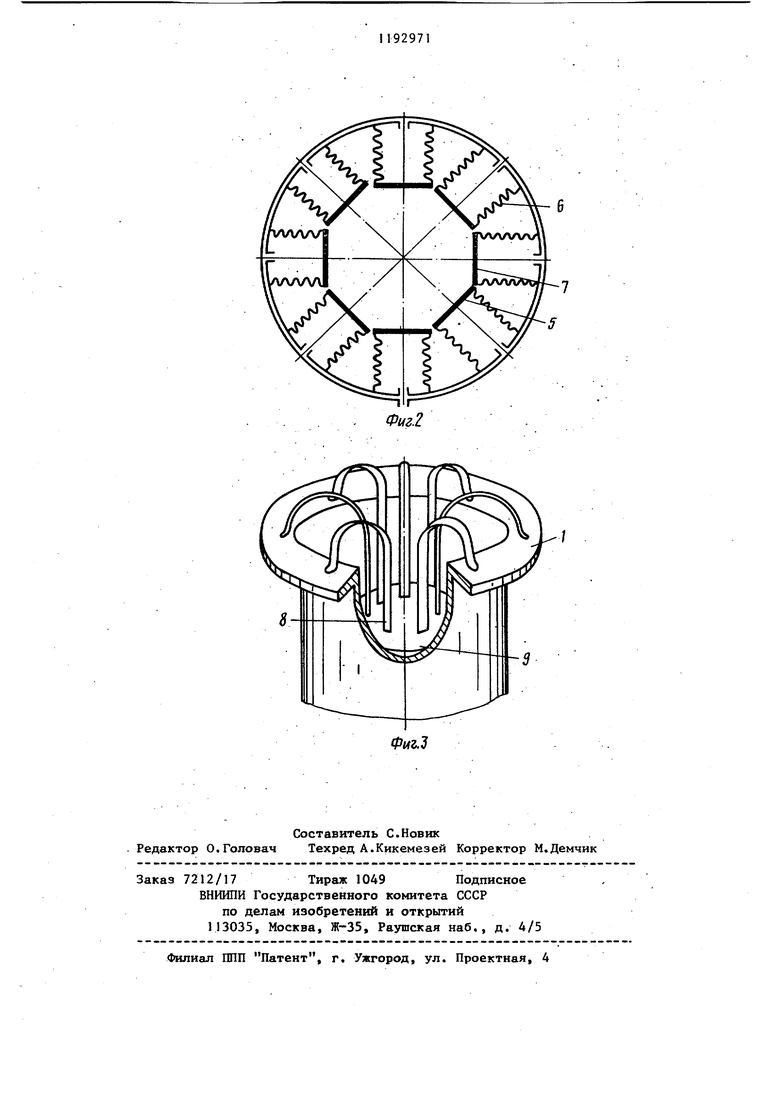
В захвате (фиг,З) упругая система выполнена в виде, гибких герметичных полых элементов 8, один конец которых закреплен на корпусе 1, а другой - на коллекторе 9. Коллектор связан с приводом в виде, например, пневмоцилиндра (не показан).
Энергоносителем во всех, трех типах схватов может быть, например, сжатый воздух.
Захват промьшшенного робота работает следующим образом.
При подаче энергоносителя в корпус-коллектор 1 и далее в упругие элементы последние деформируются и обхватывают деталь произвольной формы (не показано) губками 5,
При работе захвата, показанного на фиг,3, при перемещении коллектора 9 от привода вверх вдоль оси захвата гибкие элементы 8 начинают сходиться к центру и захватывают деталь. При подаче энергоносителя в коллектор и далее в полые элементы происходит зажим детали.
| Захват промышленного робота | 1975 |
|
SU571369A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
