(5t) ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1983 |
|
SU1110628A2 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Захват промышленного робота | 1979 |
|
SU781056A2 |
| Захват промышленного робота | 1979 |
|
SU844175A2 |
| Захват промышленного робота | 1978 |
|
SU768634A1 |
| Схват промышленного робота | 1982 |
|
SU1033312A1 |
| Захват промышленного робота | 1978 |
|
SU666074A2 |
| Захват промышленного робота | 1977 |
|
SU611775A2 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Многопозиционный захват промышленного робота | 1987 |
|
SU1491701A1 |
1
Изобретение относится к общему машиностроению и может Пыть использовано в качестве захвата в манипуляторах промышленных роботов.
По основному авт.св. К 571369 известен захват промышленного робота, содержащий упругую гибкую ленту, концы которой закреплены на неподвижном элементе приводного механизма, а подвижный элемент присоединен к среднему переги(5у ленты, причем два крайних перегиба ленты служат губками захвата 1 .
Недостатком известного захвата является то, что он не обеспечить удержание деталей, имеющих сложную конфигурацию в поперечном сечении.
Целью изобретения является расширение технологических возможностей за счет обеспечения надежного удержания деталей сложной (Ьормы.
Это достигается за счет того, что упругая лента составлена из отдельных
упругих.стержневых элементов,соединенных между собой гибкими связями, причем продольные оси упругих стержневых элементов Параллельны продольной оси упругой ленты.
5 Кроме того, гибкие связи могут быть выполнены в виде установленных на упругих оперативных элементах втулок, соединенных между собой мембранами,
.причем втулки могут быть,в частности, 10 I выполнены из эластичного материала,
-например резины.
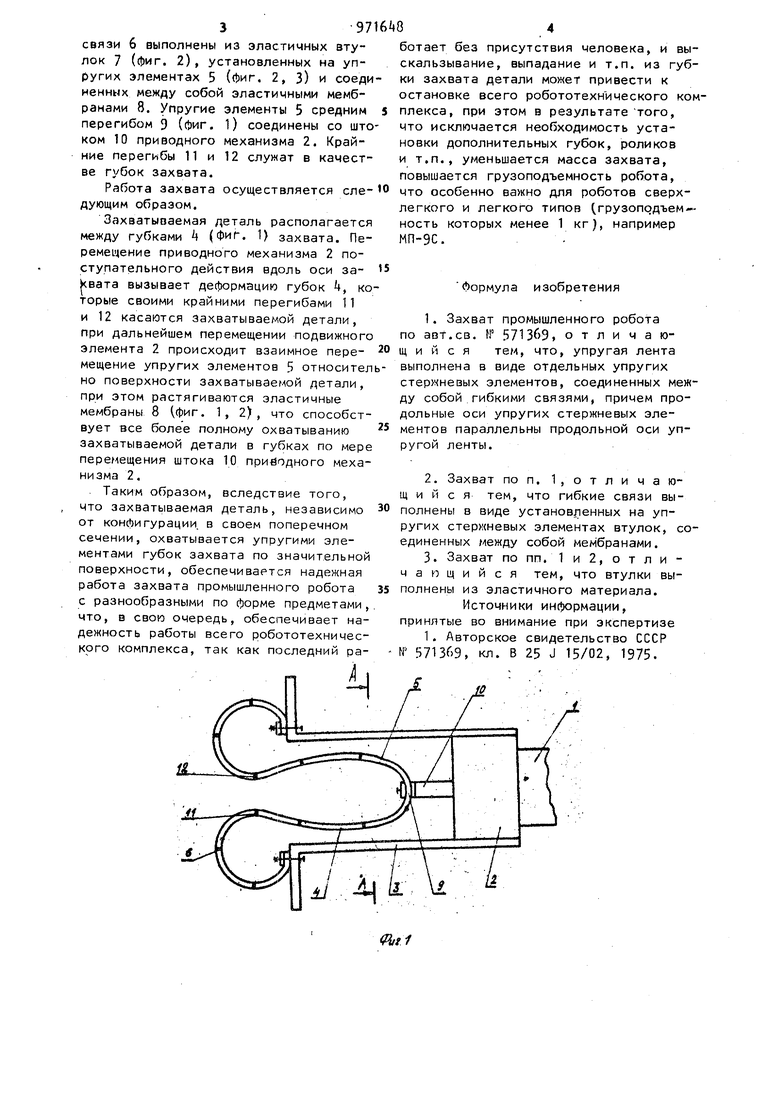
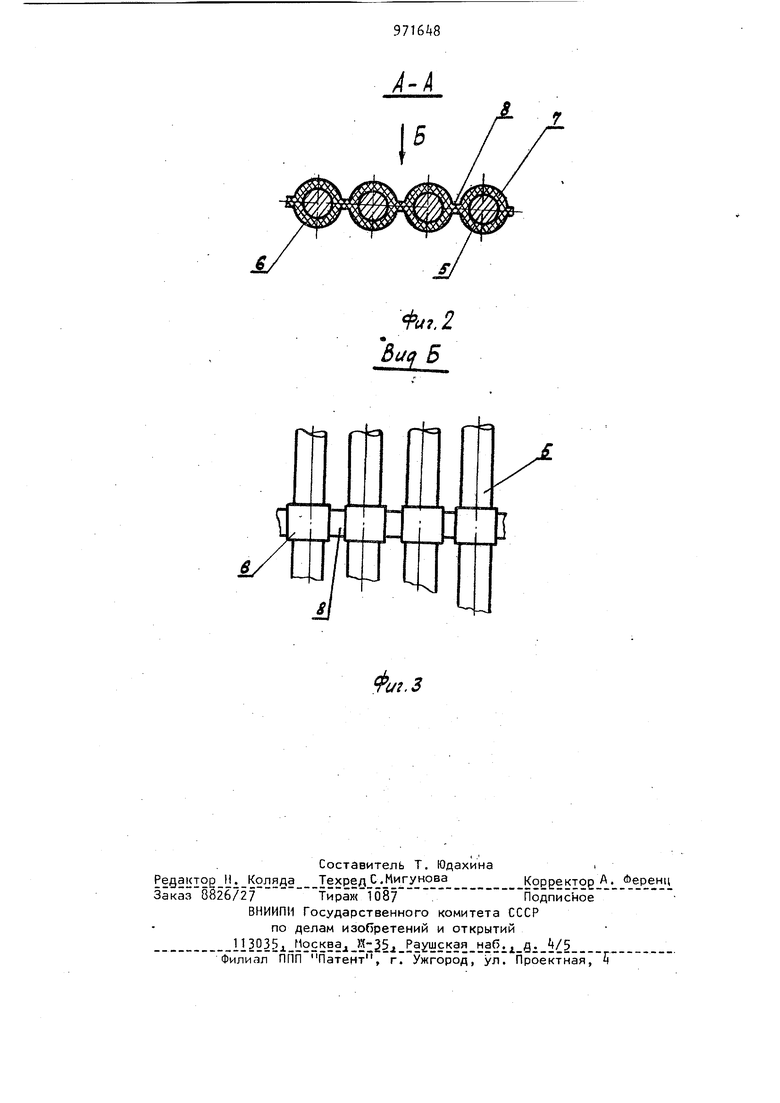
На фиг. 1 показан захват промышленного робота; на фиг. 2 - разрез А-А на фиг. 1 в увеличенном масштабе; на
15 фиг. 3 вид Б на фиг. 2,
Захват, смонтированный на руке 1 , (фиг, 1) промышленного робота, имеет приводной механизм 2, направляющие 3, губки k, составленные из упругих эле20ментов 5 (фиг. 1, 2, 3), продольные оси которых параллельны продольной оси гибкой ленты, соединенные между собой в ряд гибкими связями 6. Гибкие связи 6 выполнены из эластичных втулок 7 (фиг. 2), установленных на упругих элементах 5 (фиг. 2, 3) и соед ненных между собой эластичными мембранами 8. Упругие элементы 5 средним перегибом 9 (фиг. 1) соединены со што ком 10 приводного механизма 2. Крайние перегибы 11 и 12 служат в качестве губок захвата. Работа захвата осуществляется еледующим образом отеляется еле Захватываемая деталь располагается между губками 1 (Фиг. 1) захвата. Перемещение приводного механизма 2 поступательного действия вдоль оси вызывает деформацию губок 4, ко торые своими крайними перегибами П и 12 касаются захватываемой детали при дальнейшем перемещении подвижного ме е :Гупр7гиГ:ле::нтТ;Г° но поверхности захваты ПРИ этом рас;:гГв: тсГГ::и2н:,Г мембраны 8 1ФИГ. 1,2), что способствует все более полному охватыванию захватываемой детали в губках по мере перемещения штока 10 приходного механизма 2. Таким образом, вследстаир тог-о что захватываема; деталь от конфигурации, в поперечном г.и«ым,. иеречном it pCHnWrl сечении, охватывается упругими элементами губок захвата по значительной поверхности, обеспечивается надежная раьота захвата промышленного робота с разнообразными по форме предметами что, Q свою очередь, обеспечивает надежность работы всего робототехнического комплекса, так как последний ра±1 -Ц 9 148 ботает без присутствия человека, и выскальзывание, выпадание и т.п. из губки захвата детали может привести к остановке всего робототехнического комплекса, при этом в результате ТОГО, что исключается необходимость установки дополнительных губок, роликов и т.п., уменьшается масса захвата, грузоподъемность робота, повышается грузоподъемность робота, что особенно важно для роботов сверхчто особенно важно для роботов свер; . Сгрузоподъем. легкого и легкого типов tpyзoпqдъe ность которых менее 1 кг), например МП-9С.. Формула изобретения 1. Захват промышленного робота по авт.ев по авт.ев. ff 571369, отличаю ° - выполнена в виде отдельных упругих ,. соединенных меж. .., , ,ij у ПС П ПО А РпсЖ ду собой гибкими связями, причем продольные оси упругих стержневых элементов параллельны продольной оси упругой ленты. ° 1 , о т л и ч а ™ Усыновленных на упругих стержневых элементах втулок, со - 1х-. 11С1/Ч OlyJUJK единенных между собой мембранами. 3. Захват по пп. 1 и 2, о т л и чающийся тем, что втулки выполнены из эластичного материала. Источники информации, ринятые во внимание при экспертизе 1. Авторское свидетельство СССР 571369, кл. В 25 J 15/02, 1975. 1 /.
Фи.З
