7
//// /////// ///////////// /////////
фиг.1
ьо
ОЭ
со со
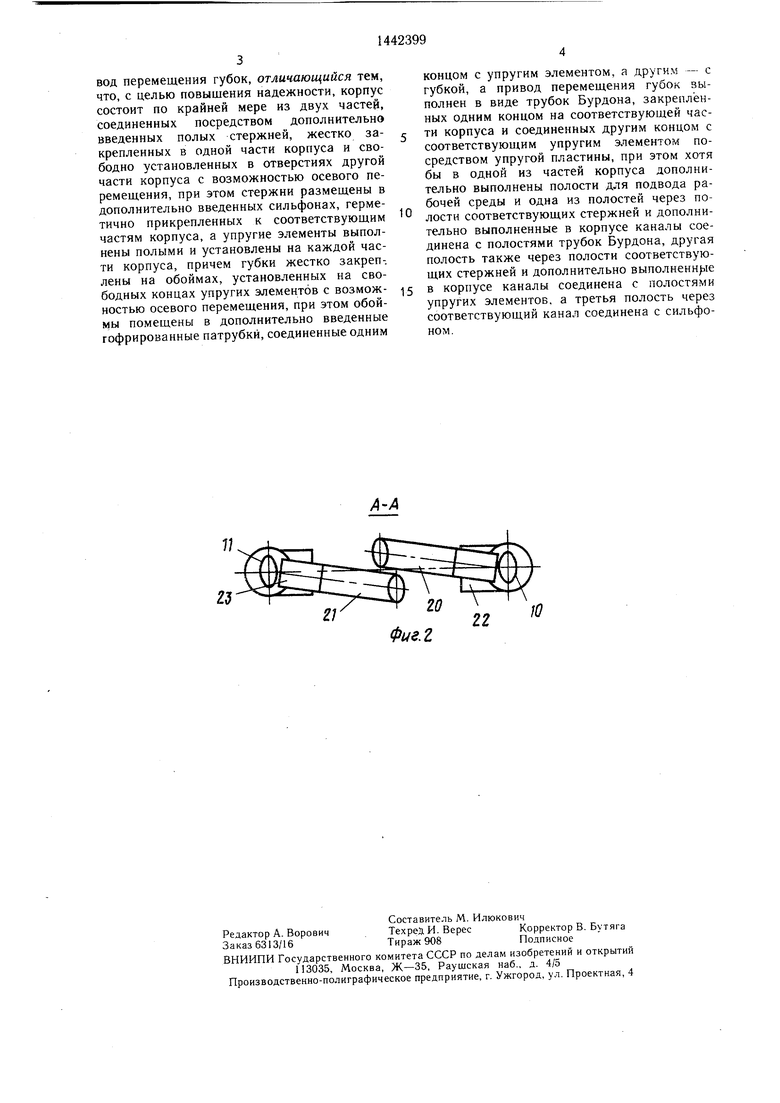
2, соединенных полыми стержнями 3, 4, которые жестко закреплены в части 1 корпуса и свободно установлены в отверстиях 5, 6 части 2 корпуса. Сильфон 9 охватывает стержни-3, 4. На частях 1, 2 корпуса закреплены полые упругие элементы 10, 11, на свободных концах которых с возможностью осевого перемещения установлены обоймы 14, 15, жестко связанные с захватными губками 12, 13. Обоймы 14, 15 помещены в гофрированные патрубки 16, 17. Привод губок 12, 13 выполнен в виде трубок Бурдона 20, 21,
закрепленных одним концом на частях 1, 2 корпуса, а другим концом соединенных с упругими элементами 10, 11. Для подвода рабочей среды выполнены полости 24-26 и каналы 27, 28, 30, 31, 39. При подаче рабочей среды в полость 24 трубки Бурдона 20, 21 деформируются и губки 12, 13 сжимаются. Уменьщая давление в полости 26, сжимают СИЛЬФОН 9, что приводит к сжатию частей 1, 2 корпуса. Губки могут также опускаться, для чего подается рабочая среда в полость 25. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата детали | 1990 |
|
SU1815222A1 |
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| Схват промышленного робота | 1984 |
|
SU1255426A1 |
| Схват | 1990 |
|
SU1811477A3 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Схват манипулятора | 1980 |
|
SU905064A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2018 |
|
RU2706904C1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
Изобретение относится к области машиностроения и может быть использовано в ро- бототехнических комплексах. Целью изобретения является повышение надежности в работе схвата промышленного робота путем исключения вьшшних узлов трения. Для этого корпус выполнен в виде отдельных частей 1, 26 25 
1
Изобретение относится к машиностроению и может быть использовано в робото- технических комплексах и гибких производственных системах.
Целью изобретения является повышение надежности работы схвата промышленного робота путем исключения внешних узлов трения.
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Устройство состоит из корпуса, содержащего части 1 и 2, соединенные между собой посредством полых стержней 3 и 4. Стержни 3 и 4 герметично и жестко закреплены в части 1 корпуса и свободно установлены в отверстиях 5 и 6, выполненных в части 2 корпуса. Соединения стержней 3 и 4 с отверстиями 5 и 6 герметизированы уплотнительными кольцами 7 и 8. Сильфон 9 охватывает стержни 3 и 4 и герметично прикреплен к частям 1 и 2 корпуса.
На частях 1 и 2 корпуса герметично и жестко закреплены полые упругие элементы 10 и 11. Захватные губки 12 и 13 жестко связаны с обоймами 14 и 15, установленными на свободных концах элементов 10 и 11 с возможностью осевого перемещения. Гоф- рированные патрубки 16 и 17 посредством ,фланцев 18 и 19 герметично прикреплены к упругим элементам 10 и 11 и губкам 12 и 13.
Привод губок 12 и 13 выполнен в виде . трубок Бурдона 20 и 21, которые одним концом герметично и жестко закреплены на частях I и 2 корпуса, а другим концом соответственно связаны с упругими элементами 10 и 11 при помощи упругих пластин 22 и 23. Для подвода рабочей среды в части 1 корпуса выполнены полости 24-26. Полость 24 посредством каналов 27 и 28 и полости 29 стержня 3 соединена с трубками Бурдона 20 и 21. Полость 25 посредством каналов 30 и 31 и полости 32 стержня 4 соединена с полостями упругих элементов 10 и 11.
В каналах 30 и 31 установлены датчики 33-35 давления, пьезокристаллические. На трубках Бурдона 20 и 21 установлены датчики 36 и 37 деформации, например тензодатчики. Выходы всех датчиков соединены с системой управления роботом. Схват присоединяется к руке промышленного робота с помощью основания 38. Полость 26 соединена каналом 39 с сильфо- ном 9.
Устройство работает следующим образом. Схват подводится к детали 40 и в полость 24 подается рабочая среда, которая, проходя через каналы 27 и 28 и полость 29, поступает в трубки Бурдона 20 и 21. Под действием внутреннего давления рабочей среды трубки 20 и 21 деформируются, за счет чего упругие пластины 22 и 23 перемещают свободные концы упругих элементов 10 и 11 и губки 12 и 13 сжимаются. На основе информации, поступающей от датчиков 33-37 в систему управления роботом, определяется степень зажатия детали 40. Если требуется увеличить давление на деталь, по команде системы управления в полости 26 уменьшается давление рабочей среды. При этом давление в сильфоне 9 также умень- и:ается и сильфон сжимается, сокращая расстояние между частями 1 и 2 корпуса, а
следовательно, и между губками 12 и 13. В случае, если губки 12 и 13 смыкаются выше детали 40, в полость 25 подается рабочая среда, при этом возникающее в гофрированных патрубках 16 и 17 давление разжимает их и губки 12 и 13 опускаются.
После этого операция захвата повторяется. Для освобождения детали 40 в полости 24 понижается давление рабочей среды, что приводит к обратной деформации трубок Бурдона 20 и 21 ив результате - к размыканию губок 12 и 13.
Формула изобретения
Схват промышленного робота, содержащий корпус, на котором установлены упругие элементы с захватными губками и при
вод перемещения губок, отличающийся тем, что, с целью повышения надежности, корпус состоит по крайней мере из двух частей, соединенных посредством дополнительно введенных полых стержней, жестко закрепленных в одной части корпуса и свободно установленных в отверстиях другой части корпуса с возможностью осевого перемещения, при этом стержни размещены в дополнительно введенных сильфонах, герметично прикрепленных к соответствующим частям корпуса, а упругие элементы выполнены полыми и установлены на каждой части корпуса, причем губки жестко закреп-, лены на обоймах, установленных на свободных концах упругих элементов с возможностью осевого перемещения, при этом обоймы помещены в дополнительно введенные гофрированные патрубки, соединенные одним
0
5
концом с упругим элементом, а другим - с губкой, а привод перемещения губок выполнен в виде трубок Бурдона, закреплённых одним концом на соответствующей части корпуса и соединенных другим концом с соответствующим упругим ааементом посредством упругой пластины, при этом хотя бы в одной из частей корпуса дополнительно выполнены полости для подвода рабочей среды и одна из полостей через полости соответствующих стержней и дополнительно выполненные в корпусе каналы соединена с полостями трубок Бурдона, другая полость также через полости соответствующих стержней и дополнительно выполненн 1е в корпусе каналы соединена с полостями упругих элементов, а третья полость через соответствующий канал соединена с сильфо- ном.
| Схват промышленного робота | 1978 |
|
SU716810A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
