1
Изобретение относится к манипуляторным устройствам с дистанционным управлением и может быть использовано при создании исполнительных органов дистанционно управляемых манипуляторов для улучшения качества их работы.
Известны манипуляторы, суставы которых соединяют неподвижное звено, несущее привод, с подвижным звеном через упругий элемент и привод.
:При использовании этих суставов в манипуляторах, особенно многозвенных, колебания подвижного звена, связанного в суставе через упругий элемент (сдающее звено) и привод с неподвижным звеном, приводят к ухудшению динамических свойств манипулятора, вплоть до потери устойчивости. В наибольшей степени это относится к исполнительному органу, оборудованному подобными суставами, не испытывающими демпфирующего воздействия оператора.
Целью изобретения является улучшение динамических характеристик системы управления манипулятора.
Сущность изобретения заключается в том, что сустав снабжен демпфером, установленным между упругим элементом и выходным валом привода. Такое выполнение сустава позволяет обеспечить плавность работы манипулятора и улучшить динамическую точность системы управления манипулятора.
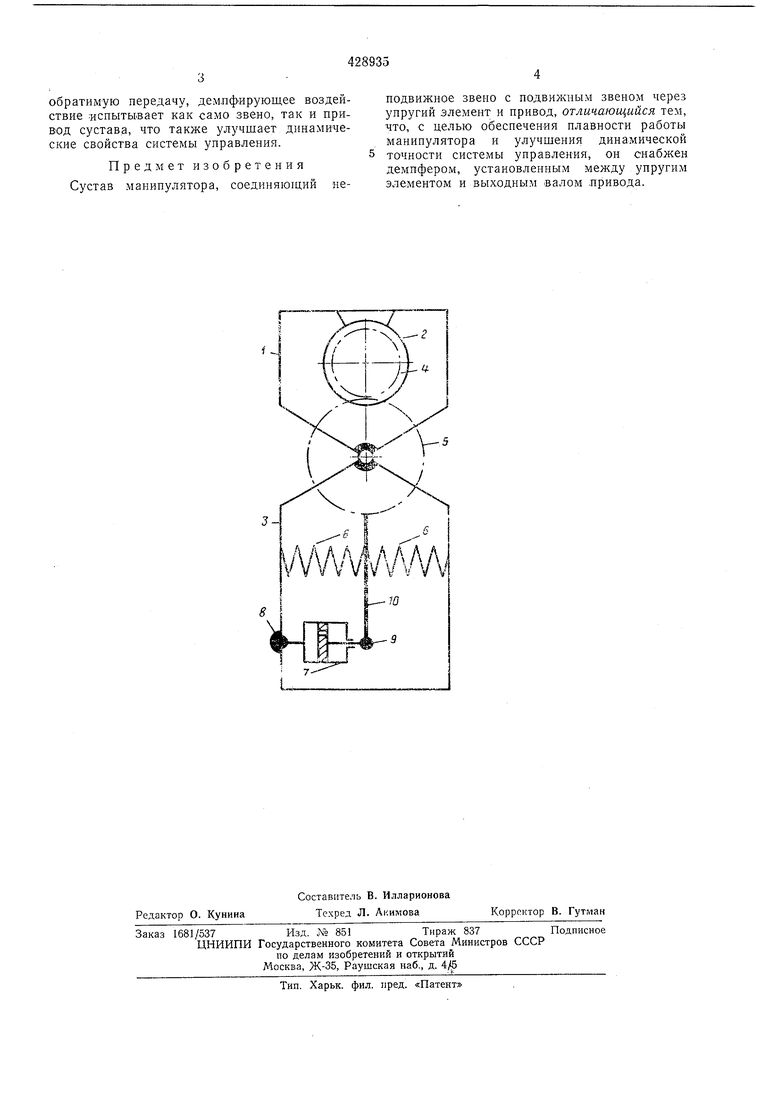
На чертеже показана кинематическая схема сустава манипулятора.
На неподвижном звене / сустава установлен двигатель 2 привода, передающий движеtrfie подвижному звену 3 через зубчатые щестерню 4, колесо 5 и сдающее звено 6 с демпфером 7 в нем. Демпфер 7 связан с одной стороны шарниром 8 с подвиЛСным звеном 5, а с другой стороны через шарнир 9 я тягу 10 с зубчатым колесом 5.
При нодаче на привод сигнала управления включается двигатель 2. Момент, развиваемый двигателем, передается через шестерню 4, колесо 5, тягу W и сдаюшее звено 6 на звено 3. Звено 3 поворачивается относительно звена у. Усилне на тяге 10 вызывает относительное перемещение частей демпфера 7, что приводит к возникновению демпфирующих сил вязкого трения, зависящих от скорости этого перемещения. Параметры демпфера выбраны так, что они обеспечивают необходимое затухание колебаний массы подвижного звена 3, причем эти параметры выбраны с учетом массы (момента инерции) объекта манипулирования, связанного с этим звеном непосредственно или через другие звенья. При установке демпфера между подвижным звеном и выходным валом привода, имеющего необратимую передачу, демпфирующее воздействие испытывает как само звено, так и привод сустава, что также улучшает динамические свойства системы управления.
Предмет изобретения Сустав манипулятора, соединяющий
неподвижное звено с подвижным звеном через упругий элемент и привод, отличающийся тем, что, с целью обеспечения плавности работы манипулятора и улучшения динамической точности системы управления, он снабжен демпфером, установленным между упругим элементом и выходным -валом .привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| Электромеханический сустав манипулятора | 1980 |
|
SU975396A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1977 |
|
SU627959A1 |
| Сустав манипулятора | 1980 |
|
SU944922A1 |
| Сустав манипулятора | 1984 |
|
SU1192972A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1972 |
|
SU423624A1 |
| Мобильное устройство для монтажа и демонтажа вагонных дверей | 2022 |
|
RU2791355C1 |
.
VVVvA/i/WA
