Изобретение относится к тракторному и сельскохозяйственному машиностроению, в частности к сочлененным тракторным агрегатам, и является дополнительным к авт. св. № 1066873.
Цель изобретения - повышение эффективности использования модуля.
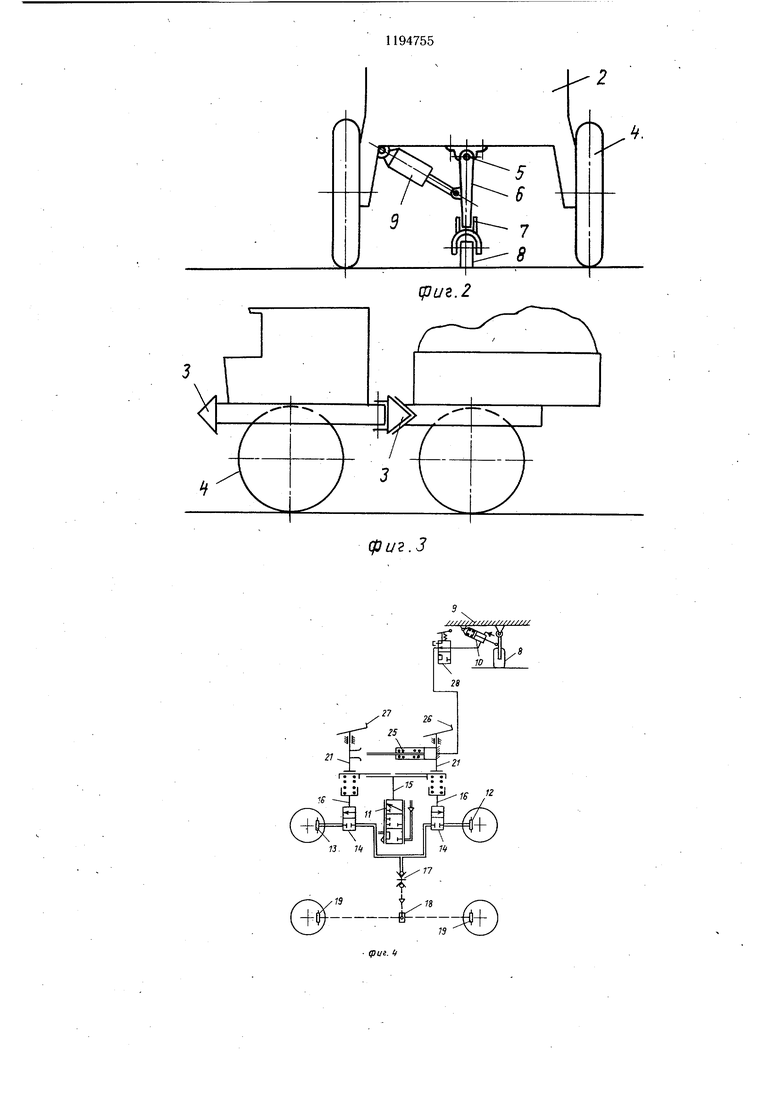
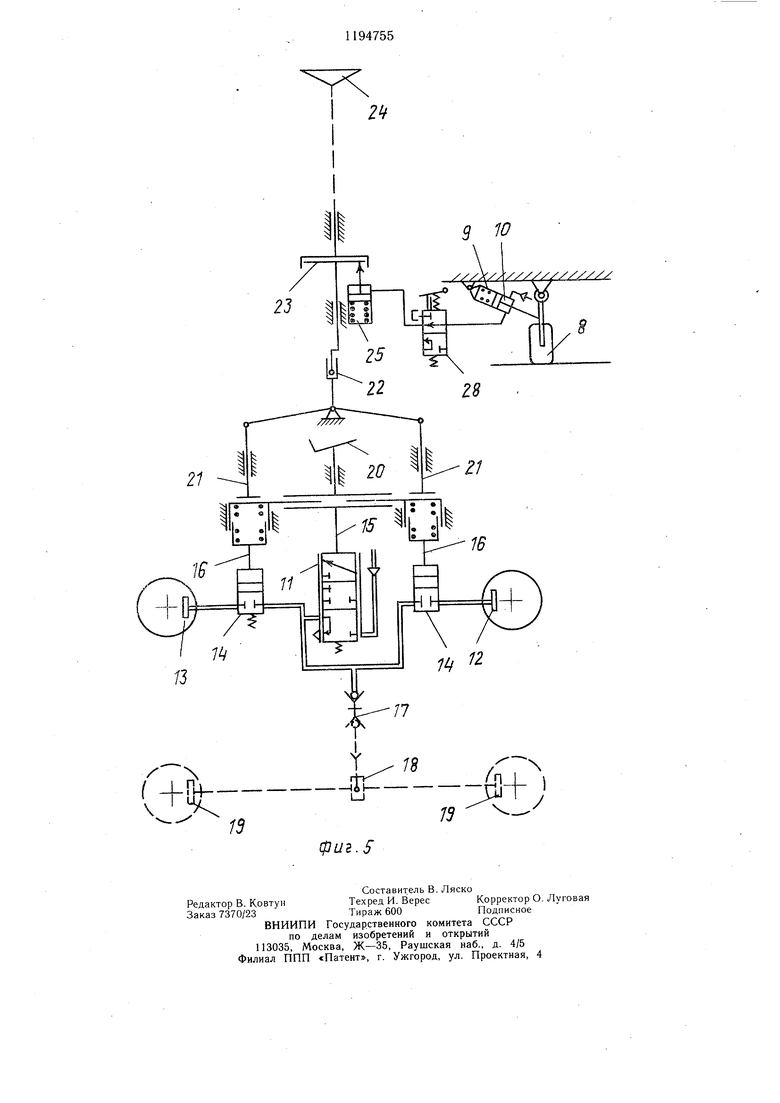
На фиг. 1 представлен одноосный энергетический модуль, вид сбоку; на фиг. 2 - то же, вид спереди; на фиг. 3 - одноосный энергетический модуль в агрегате с технологическим модулем; на фиг. 4 - принципиальная схема привода раздельного торможения модуля от двух тормозных педалей; на фиг. 5 - то же, от рулевого колеса.
Одноосный энергетический модуль включает в себя энергоблок 1, монтируемый на раме 2, iia которой спереди и сзади закреп. сцег;::ые устройства 3, ведущие колеса 4 с дифференциальной связью между ними и раздельным приводом их торможения. В нижней части рамы 2 в горизонтальном шарнире 5 расположен дугообразный упругий элемент 6, на обоих концах которого установлены вертикальные шарниры 7, оси которых смещены к центру рамы 2 относительно осей дополнительных убирающихся колес 8, установленных на упругом элементе 6. Последний соединен со щтоком гидроцилиндра 9 подъема колес, который прикреплен к раме 2 тягача перпендикулярно направлению движения.
Штоковая часть 10 гидроцилиндра 9 выполнена управляющей для механизма включения раздельного привода тормозов. Упомянутый механизм (фиг. 4) состоит из тормозного крана 11, сообщенного с правым и левым тормозными камерами 12 и 13 ведущих колес 4 энергетического модуля посредством двухпозициоНных распределителей 14 дискретного действия. Тормозной кран и управляется толкателем 15, а распределители 14 - толкателями 16. Выход тормозного крана 11 сообщен также через соединительную муфту 17 с клапаном 18, управляющим тормозными камерами 19 колес технологического модуля.
В случае использования рулевого управления механизмом раздельного торможения толкатель 15 управляется тормозной педалью 20, а толкатели 16 - толкателями 21, кинематически связанными с эксцентриком 22, который в свою очередь через постоянно замкнутую муфту 23 соединен с рулевым колесом 24. Муфта 23 управляется цилиндром 25. При использовании управления механизмом раздельного торможения посредством двух тормозных педалей 26 и 27 последние блокируются между собой посредством цилиндра 25 и одновременно могут управлять одним из распределителей 14 и тормозным краном 11.
В обоих случаях управляемые полости цилиндра 25 сообщены через двухпозиционный распределитель 28 с управляющей штоковой частью 10 гидроцилиндра 9. Одноосный энергетический модуль работает следующим образом.
В расцепленном состоянии дополнительные убирающиеся колеса находятся в опущенном положении с помощью пружин гидроцилиндра 9, и модуль имеет возможность самостоятельного передвижения. При этом податливость и жесткость упругого элемента 6 позволяет колесам 8 постоянно копировать рельеф дороги и удерживать модуль от опрокидывания вперед или назад. При
5 осуществлении поворота воздействуют или на колесо 24 (фиг. 5), или на одну из тормозных педалей 26 (27) (фиг. 4). При зо-ом срабатывает тормозной кран и один из распределителей 14 пропускает текучую среду под давлением (например, в данном случае
0 воздух) в одну из тормозных камер 12 (13). Колесо 4 (правое и левое) притормаживается, обеспечивая поворот модуля. Во всех случаях механизм управления раздельным торможением включен за счет пружин цилиндра 25. Общее торможение модуля осуществляется за счет нажатия на тормозную педаль 20 или на обе педали 26 и 27 одновременно.
При стыковке модуля с технологической машиной (фиг. 3) текучая среда под давлением поступает в штоковую часть 10 гидроцилиндра 9, в результате чего колеса 8 убираются под раму 2 энергетического модуля. Одновременно срабатывает цилиндр 25, размыкая муфту 23 или блокируя педали 26 и 27. Поворот в этом случае осуществляется за счет изменения взаимного расположения колес энергетического и технологического модуля относительно продольной оси известными способами.
Общее торможение в этом случае осуществляется также нажатием на педаль 20 (фиг. 5) или на сблокированные педали 26 и 27 (фиг. 4). При этом текучая среда под давлением поступает в тормозные камеры 12 и 13 энергетического модуля и через муфту 17 и клапан 18 в тормозные камеры 19
5 технологического модуля.
Если модуль стыкуется с прицепной технологической мащиной без механизма управления поворотом (например, без шарнирноQ сочлененной рамы), то его .поворот осуществляется за счет одного из способов (фиг. 4 и 5) раздельного торможения путем сообщения управляемой полости цилиндра 25 со сливом через распределитель 28 при воздействии на его рукоятку. В этом случае
5 замыкается муфта 23 (фиг. 5) или разблокируются педали 26 и 27 (фиг. 4).
CpU2.3
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Гидропневматическая тормозная система трактора | 1981 |
|
SU1000319A1 |
| САМОХОДНАЯ МАШИНА ДЛЯ ОБРАБОТКИ АЛЮМИНИЕВЫХ ЭЛЕКТРОЛИЗЕРОВ | 2015 |
|
RU2593251C1 |
| Гидрообъемный привод транспортного средства | 1987 |
|
SU1414665A1 |
| Двухзвенное транспортное средство | 1985 |
|
SU1273289A1 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ТОРМОЗОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2073799C1 |
| Транспортное средство | 1990 |
|
SU1750992A1 |
| Транспортное средство | 1980 |
|
SU882797A1 |
| Транспортное средство | 1982 |
|
SU1049301A2 |
| Транспортное средство | 1986 |
|
SU1342762A1 |
ОДНООСНЫЙ ЭНЕРГЕТИЧЕСКИЙ МОДУЛЬ СОЧЛЕНЕННОГО ТРАНСПОРТНОГО СРЕДСТВА по авт. св. № 1066873, отличающийся тем, что, с целью повышения эффективности использования модуля, он снабжен гидроуправляемым механизмом выключения раздельного привода тормозов, исполнительный узел которого сообщен с гидроцилиндром через двухпозиционный распределитель. СЛ со 4 сд СЛ фиг.-}
Ч
| Одноосный энергетический модуль сочлененного транспортного средства | 1982 |
|
SU1066873A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
