Для автоматического определения координат тележки, движуидейся по заданиому криволинейному пути, ирименяют различные нрофилогра:фьу, нивелиры-автоматы, планирографы и пр.
Предлагаемое устройство отличается от известнь х устройств тем, что его тележка, перемещаемая по заданному крпволипейпому пути, выполнена из двух взаимно подвижных звегп ев, установленных на трех колесах, и песет вычислительное устройство, решающее систему разностных уравнений, связывающих параметры по.тожения звеньев тележки, и вычисляющее ее координаты.
Такое выполнение устройства позволяет повысить точность определепия координат, так как действие его основано на математически точном рещении задачи определения координат.
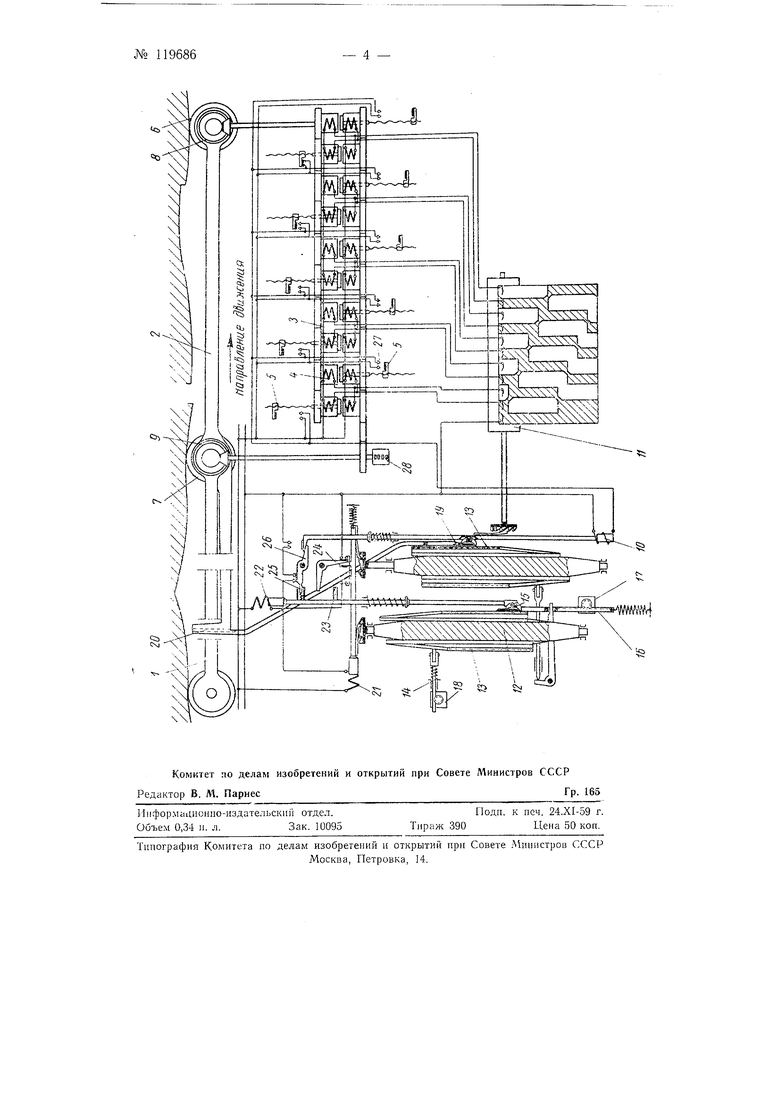
На чертеже изображена схема предлагаемого устройства.
Устройство выполнено в виде трехколесной тележки, состояи1ей из двух взаимно подвижных звеньев / и 2 одинаковой длины. Тележка несет вычислительное устройство, рещающее систему разностных уравне1ГИЙ, связывающих параметры положения переднего и заднего звеньег те.тежки при ее движении.
Тележка запускается с прямолипейг ого участка пути. Ось абсцисс при этом совпадает с направлением движепия. От этой оси отсчитываются в дальнейшем углы поворота звеньев тележки. При помощи такого устройства определяются координаты конечного числа точек в пределах каждого участка пути, равного длине звена тележки. Деление пути на нрямолинейпые участки, равные длине звена тележки, осуществляется в устройстве с номощью двухмерных колес тележки, а также применением соответствующего числа делительных блоков 5, состоящих каждый из двух двойных электромагнитных муфт 4, включаюпшх поперемсмтно дкз реверсивных счетчика 5.
№ 119686
Электромагнитные муфты обеспечивают привод счетчиков 5 поочередно от переднего 6 или среднего 7 мерных колес через мультипликаторы 8 и 9 и одновременно реверсируют направление враш,ения винтов. Таким образом, осуществляется запоминание угла поворота переднего колеса и соответствующего ему угла поворота среднего колеса. Мультиплицирование угла поворота мерных колес введено для уменьшения относительных ошибок, связанных с неточностью выполнения механизмов, и принципиальной ошибки, происходящей от непостоянства угла раствора звеньев.
В начальном положении прибора гайки всех пяти пар винтовых счетчиков 5 устанавливаются так, чтобы сумма путей двух гаек одной пары (винты счетчиков расноложены на схеме один вниз, другой вверх) равнялась полному пути гайки от своих контактов, соответствующему углу поворота колеса.
После прохождения средним колесом по стартовому участку пути,
равного у а (где а-длина звеньев тележки), гайка нижнего винтовог-л
счетчика 5 первой замкнет свои контакты, что вызовет срабатывание солеиоида 10. При этом он повернет на 0,1 оборота барабан 11 контроллера и переключит винт верхнего счетчика 5 на среднее колесо, а винт нижнего счетчика на переднее колесо, т. е. в обратном порядке, чем было до сих пор.
При этом счетчик отсчитает участок пути, ограниченный хордой длиною а. Переднее же колесо в это время отложит на винте счетчика путь гайки, соответствуюш.ий длине следуюш,его участка пути, и т. д.
Суммирование и запоминание значений координат осуществляется при помощи двух барабанов 12, вдоль образующих которых с трением в направляющих движутся храповые рейки 13 с коническими концами; эти рейки упираются поперечные штоки 14 и 15, передающие соответствующие перемещения в механизм. Количество реек 13 соответствует числу частей, на которые разделен участок пути (в данном случае пять частей) ,
Положение рейки 13 вдоль образующей одного барабана онределяет величину и знак соответствующей абсциссы, которая через угловой рычаг и тягу 16 передается на счетчик 17. Значение ординаты снимается с поперечных щтоков 14 и передается непосредственно на цифровые счетчики 18. Со второго барабана снимается значение угла поворота переднего колеса.
Штанга соленоида 10 связана с собачками, перемещающими рейку 13 правого барабана 12 в соответствии с перемещением щтока 19, сочлененного через реечно-еекторную передачу 20 с передним звеном тележки. Таким образом, положение щтока 19 вдоль образующей барабана 12 будет однозначно связано с величиной и знаком угла раствора звеньев тележки.
При прямом и обратном движении штанги соленоида 10 замыкается электрическая цепь соленоида 21. Шток соленоида 21 своим прямым ходом поворачивает на - оборота правый барабан 12 и подводит только
что выставленную рейку 13 под шток 14 (щток 14 условно показан только иа левом барабане 12). В конце своего хода щток соленоида 21 включает соленоид 22, который перемеихает И1тангу с собачками, отрабатывающими на рейках левого барабана 12 величину ординаты, обработки ординаты зуб 23, имеющийся на штанге соленоида 22, взаимодействуя с угловым рычагом 24, выключает свой соленоид. При этом подпружиненный фиксатор 25, укрепленный на щтанге соленоида 22, проскакивает за носик контактного рычага 26 н ъ самом конце обратного
хода штанги разрывает цепь соленоида 21. Штанга последнего возвращается назад под действием и поворачивает на - оборота
.левый барабан 12, который суммирует значения ординат.
Описанный процесс происходит при каждом включении любой из пар контактов 27, замыкаемых гайками винтовых счетчиков, т. е. 5 раз на каждом участке пути.
Цифровой счетчик 28 указывает текущее значение еути, пройденного тележкой, которое в данной постановке задачи с достаточной точностью можно принять за абсциссу.
Предмет изобретения
Устройство для автоматического определения координат тележки, движущейся по заданному криволинейному пути, отличающееся тем, что, с целью повышения точности определения координат, тележка выполнена из двух взаимно подвижных звеньев одинаковой длины, установленных на трех колесах, и несет вычислительное устройство, решающее систему разностных уравнений, связывающих параметры положения звеньев тележки, и вычисляющее координаты тележки в любой требуемый момент времени.
- 3 -№ 119686