Изобретение относится к автотракторостроению, в частности к электропневматическим тормозным системам колесных транспортных средств, и является усовершенствованием тормозной системы по авт. св. № 998178.
Цель изобретения - повышение устойчивости движения при торможении путем автоматического регулирования величины асинхронности срабатывания тормозных приводов звеньев транспортного сред-ства в зависимости от их загрузки.
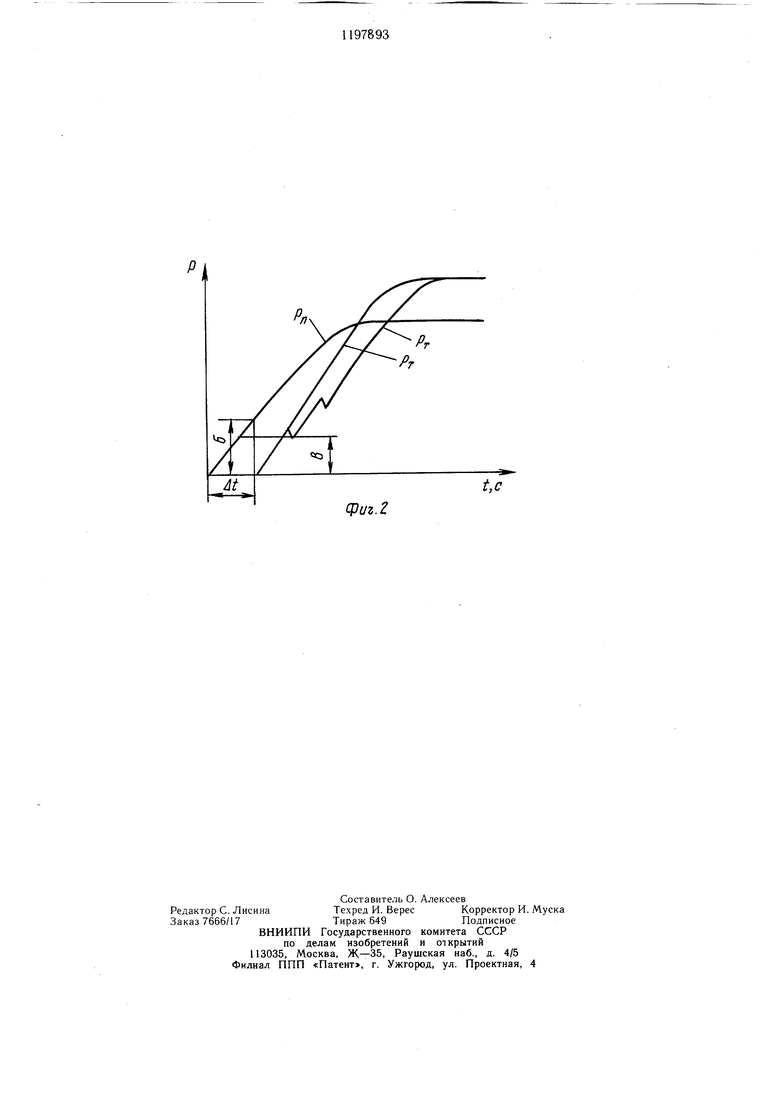
На фиг. 1 изображена схема предлагаемой электропневматической тормозной системы транспортного средства; на фиг. 2 - динамические характеристики электропневматической тормозной системы транспортного средства.
Электропневматическая тормозная система транспортного средства содержит установленные на тягаче источник I давления, тормозной кран 2, управляемый педалью 3 и соединенный с тормозными камерами 4 тягача через электромагнитный клапан 5 н с воздухораспределителем 6 прицепа. Воздухораспределитель 6 соединен с ресивером 7- прицепа и с его тормозными камерами 8, а посредством электромагнитного клапана 9 связан с электронным блоком управления, который содержит широтноимпульспый модулятор 10, связанный своим входом с датчиком 11 перемеп.1ения педали, а выходо.м через усилитель 12 мощности - с электромагнитным клапаном 9 прицепа. Кроме того, электронный блок содержит устройство сравнения, включающее в себя компаратор 13 с одним пороговым значением А, сумматор 14, соединенный с датчиками 15 и 16 давления тягача и прицепа, установленными соответственно на выходах электромагнитного клапана 5 тягача и воздухораспределителя 6 прицепа, компаратор 17 с вторым пороговым уровнем Б, логический элемент 18 ИЛИ и усилитель 19 мощности. При этом выход сумматора 14 соединен с входом компаратора 17 и с входом компаратора 13. Выходы компараторов 13 к 17 соединены с входами логического элемента 8 ИЛИ, входы которого соединены с одним из входов логического элемента 20 И. При этом другой вход логического элемента 20 И связан с выходом компаратора 21 с третьим пороговым уровнем В. Выход компаратора 21, в свою очередь, соединен с датчиком 16 давления прицепа, установленным на выходе воздухораспределителя 6 прицепа. Выход логического элемента 20 И через усилитель 19 мощности соединен с электромагнитным клапано.м 5 тягача. Тормозная педаль 3 связана с контактами выключателя стоп-сигнала (не показаны).
Датчик 22 загрузки прицепа связан с вхоZIOM компаратора 17, задающим пороговый уровень Б, и выполнен в виде диафрагмы
23,являющейся частью стенки резервуара
24.Диафрагма 23 соединена с движком потенциометра 25, который электропроводом 26 соединен с входом компаратора 17.
Электропневматическая тормозная система работает следующим образом.
При нажатии на тормозную педаль 3 тормозной кран 2 сообщает источник 1 давления с тормозными камерами 4 тягача
и магистраль управления воздухораспределителем 6 прицепа с атмосферой. Одновременно контактами выключателя стоп-сигнала осуществляется включение электронного блока. Датчик 11 вырабатывает аналоговый электрический сигнал, пропорциональный перемещению педали 3, который, преобразованный щиротно-импульсным модулятором 10 в серию импульсов с переменной длительностью, через усилитель 12 мощности поступает на электромагнитный
Q клапан 9, установленный на крыщке воздухораспределителя 6. Длительность импульсов пропорциональна перемещению педали 3 т.е. интенсивности торможения тягача. Элект. ромагнитный клапан 9 имеет два положения: когда на его входе импульса нет, он
соединяется с атмосферой, когда на его вход приходит очередной импульс, электромагнитный клапан 9 соединяется с ресивером 7, и порция сжатого воздуха поступает через крышку в воздухораспределитель 6, воздействуя на его поршень. В результате на выходе воздухораспределителя 6 обеспечивается широтно-импульсная модуляция в тормозных камерах 8 прицепа. Таким образом, при нажатии на тормозную педаль 3 сжатый воздух из ресивера 7 через электромагнитный клапан 9 и воздухораспределитель 6 поступает в тормозные камеры 8 прицепа. Величины давлений РТ в тормозных камерах тягача и РП на выходе воздухораспределителя 6 прицепа, преобразованные датчиками 15 и 16 в аналоговые электО рические сигналы, сравниваются в устройстве сравнения электронного блока. Давление РТ на выходе электромагнитного клапана 5 тягача регулируется в зависимости от заданного давления Рц по указанному алгоритму. При этом устройство сравнения работает следующим образом. Электрические сигналы с датчиков 15 и 16, пропорциональные давлениям Р и Рд, поступают на вход сумматора 14, на выходе которого получают напряжение Uc, пропорциональное разности
0 РП - Р. Это напряжение подается на вход компаратора 13 с одним пороговым значением А 0) и на вход компаратора 17 с вторым пороговым значением Б. Если указанное напряжение , на выходе компаратора 13 фор.мируется уровень потенциала, соответствующий логической «1, если , то логическому «О. В компараторе 17 это напряжение Uc сравнивается с вторым пороговым значением Б. Если Uc.b, то на
выходе компаратора 17 формируется логическая «1, если , на выходе последнего формируется логический «О. Сигналы с выходов компараторов 13 и 17 поступают на входы логического элемента 18 ИЛИ и с его выхода - на один из входов логического элемента 20 И. На другой вход последнего поступает сигнал с выхода компаратора 21 с третьим пороговым уровнем В. При этом электрический сигнал с выхода логического элемента 20 И в виде серии импульсов поступает через усилитель 19 мощности на электромагнитный клапан 5 тягача. Если на вход последнего приходит импульс, что соответствует в данном случае логической «1, электромагнитный клапан 5 соединяет магистраль управления тормозными -камерами 4 тягача с атмосферой. Если импульса нет, указанная магистраль через нижнюю секцию тормозного крана 2 и электромагнитный клапан 5 соединяется с источником 1 давления.
При выполняется логика, заданная известным устройством сравнения, в результате которого-тормозные камеры 4 тягача периодически соединяются то с атмосферой, то с источником 1 давления. Если , выполнение логики сравнения, заданной известным логическим устройством, прекращается, и на выходе логического элемента 20 И формируется логический «О. Значит, при электрический импульс на входе электромагнитного клапана 5 отсутствует. В таком положении электромагнитный клапан 5 соединяет тормозные камеры 4 тягача через тормозной кран с источником 1 давления. При этом нарастание давления в тормозных камерах 4 тягача происходит как обычно, без колебаний и до своего максимального установившегося уровня. Если пороговую величину В выбрать минимальной, равной, например, 0,1 МПа, то происходит только сдвиг во времени динамической характеристики тормозкого привода тягача на величину положительной асинхронности At, соответствующей второму пороговому значению Б при полном отсутствии колебаний в тормозных камерах 4 тягача (фиг. 2). При этом величина порогового уровня Б устанавливается автоматически с помощью датчика 22 загрузки прицепа. Диафрагма 23 прогибается в зависимости от степени наполнения резервуара 24 и, передвигая движок потенциометра
25, меняет входной электрический сигнал компаратора 17, соответствующий пороговому уровню Б. Система работает аналогично и при других датчиках загрузки, например, связанных с подвеской.
В результате положительная асинхронность срабатывания тормозных приводов тягача и прицепа, соответствующая пороговому уровню Б, регулируется пропорционально загрузке прицепа. Если прицеп порожний, то сигнал датчика 22 загрузки равен нулю (или минимальному значению, зависящему от веса прицепа), следвательно, пороговый уровень Б также равен нулю (или выщеуказанному минимальному значению), и происходит одновременное нарастание давления в тормозных камерах 4 и 8 (или минимальное опережение нарастания давления в тормозных камерах 8). Если загрузка прицепа увеличилась, то электрический сигнал от датчика 22 загрузки также увеличивается, что ведет к пропорциональному увеличению значения порогового уровня Б, а следовательно, и величины положительной асинхронности, т.е. происходит опережающее срабатывание тормозного привода прицепа. Оттормаживание происходит аналогичным образом. При опускании тормозной педали 3 тормозной кран 2 сообщает тормозные камеры 4 тягача с атмосферой, а магистраль управления воздухораспределителем 6 - с источником 1 давления, чем обеспечивается зарядка ресивера 7 прицепа сжатым воздухом. Воздухораспределитель 6 соединяет тормозные камеры 8 прицепа с атмосферой. Одновременно при отпускании педали 3 происходит уменьшение величины электрического сигнала от датчика 11 перемещения педали, а следовательно, пропорциональное уменьшение длительности импульсов на входе широтно-импульсного модулятора 10, поэтому давление на выходе воздухораспределителя бив тормозных камерах 8 прицепа также уменьшается. При этом оттормаживание происходит в обратной последовательности, которая задается указанным устройством сравнения. Это происходит вследствие того, что сигнал рассогласования, вырабатываемый устройством сравнения, воздействует на электромагнитный клапан 5 тягача, соединяя тормозные камеры 4 с атмосферой. При этом асинхронность оттормаживания звеньев также регулируется пропорционально загрузке прицепа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропневматическая тормозная система транспортного средства | 1981 |
|
SU998178A2 |
| Электропневматическая тормозная система транспортного средства | 1980 |
|
SU925715A1 |
| Электропневматическая тормозная система транспортного средства | 1981 |
|
SU1000320A2 |
| Электропневматическая тормозная система транспортного средства | 1982 |
|
SU1090599A2 |
| Двухпроводная электропневматическая тормозная система прицепа | 1990 |
|
SU1754523A2 |
| Электропневматическая тормозная система двухзвенного транспортного средства | 1988 |
|
SU1604645A1 |
| Электропневматическая тормозная система транспортного средства | 1979 |
|
SU854785A1 |
| Однопроводная электропневматическая тормозная система транспортного средства | 1983 |
|
SU1162647A1 |
| Электропневматическая тормозная система транспортного средства с тягово-сцепным устройством | 1980 |
|
SU925716A1 |
| Однопроводная электропневматическая тормозная система прицепа | 1982 |
|
SU1090597A1 |
ЭЛЕКТРОПНЕВМАТИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА по авт. св. № 998178, отличающаяся тем, что, с целью повышения устойчивости движения при торможении путем автоматического регулирования величины положительной асинхронности срабатывания тормозных приводов звеньев транспортного средства в зависимости от их загрузки, она снабжена электрической связью датчика загрузки прицепного звена с входом второго компаратора, служащим для задания второго порогового уровня. со СХ) ;о оо 
| Электропневматическая тормозная система транспортного средства | 1981 |
|
SU998178A2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
