СО: СО
1
Изобретения относится к способам управления многоканатной подъемной установкой с приводным и отклоняющим шкивaмli в частности к способу управления процессами торможения или ускорения и может применяться для управления шахтными подъемными установками.,
Известен способ регулирования силы сцепления головных канатов с приводным шкивом мнйгоканатной подъ ной машины, включающий операции установки копровых регулировочных шкивОв сбоку ветвей равномерно натянутых головных канатов, и сообщение головным канатам постоянного для всех режимов работы подъемной машины начального прогиба в плоскости, пер пендикулярной к оси движения подъемного сосуда ЩНедостатком известного способа является эксплуатация многоканатной подъемной машины с постоянно заданным максимальным начальным отклонением головных канатов в плоскости, перпендикулярной к оси движения подъемного сосуда, обеспечивающего отсутствие проскальзывания головных канатов по футеровке приводного шкива при аварийном торможении подъемной машины. Это снижает срок службы головных канатов. С другой стороны, в процессе эксплуатации постоянно заданное отклонение головных канатов из-за изменения коэффициента сцепления головных канатов с футеровкой приводного шкива не всегда может обеспечивать отсутствие проскальзьшания. В последнем случае не обеспечивается безопасность и безаварийность эксплуатации подъемной машины, так как появляется неуправляемое движение многомассовой системы сосуд - головные канаты - сосуд или противовес.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является способ уравнительного натяжения головных канатов, включающий изменение прОгиба головных канатов путем перемещения отклоняющих шкивов в плоскости, перпендикулярной к оси движения подъемных сосудов 2 .
Недостатком этого способа является невозможность управления силой сцепления канатов на приводном шкиве при возникновении экстренных
979732
условий работы подъемной установки что снижает безопасность эксплуатации установки.
Цель изобретения - повьш1ение
5 безопасности эксплуатации подъемной установки.
Указанная цель достигается тем, что согласно способу, включающему изменение прогиба головных канатов
10 путем перемещения отклоняющих шкивов в плоскости, перпендикулярной оси движения подъемных сосудов, изменение прогиба осуществляют одновременно у .всех канатов на одинаковую величину, которую устанавливают в соответствии с каждым из управляюпщх .сигналов о нормальном режиме работы подъемной машины, спуске .груза, о подъеме перегруженного
20 подъемного сосуда и экстренного
торможения, при этом величину прогиба головных канатов непрерьгоно увеличивают пропорционально величине проскальзывания головных канатов
25 по футеровке приводного шкива.
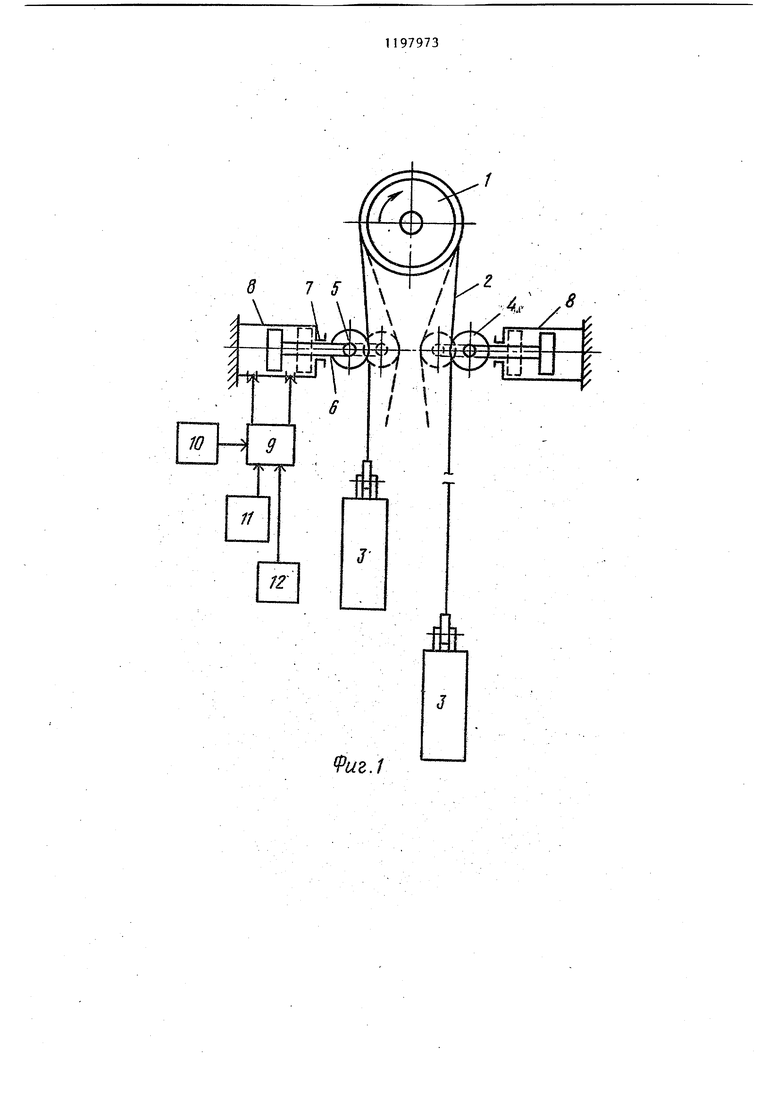
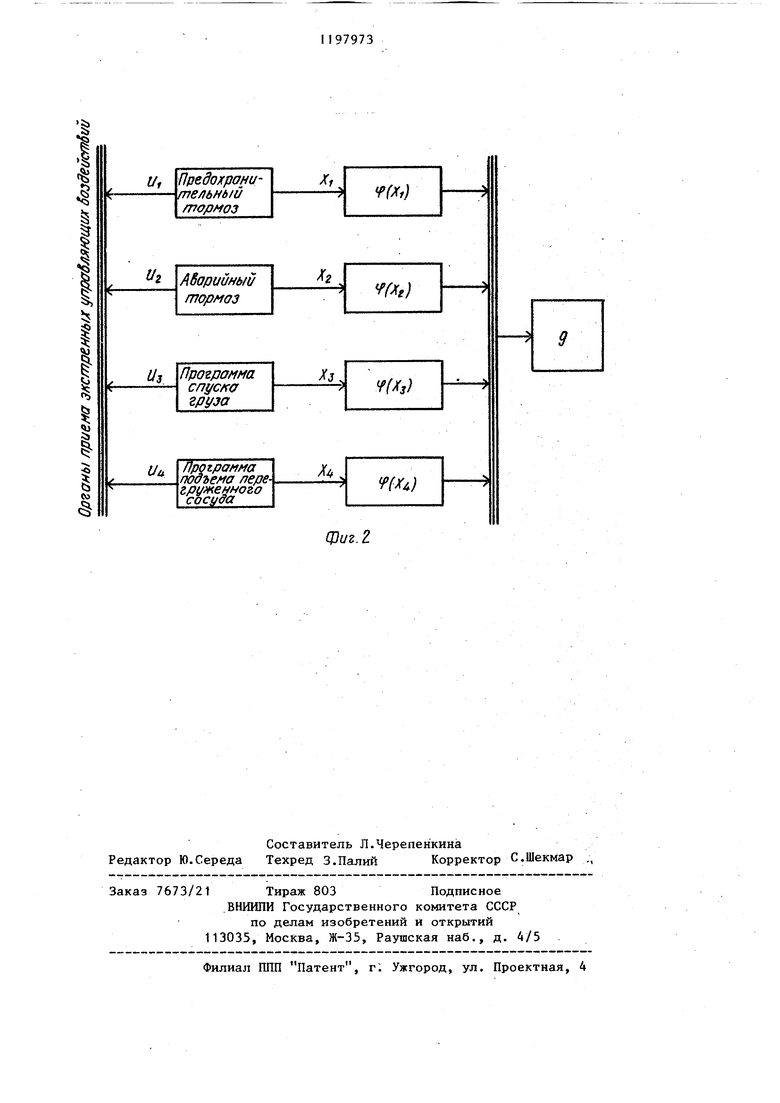
Кроме того, изменение прогиба головных канатов осуществляют до их зажима между отклоняющими шкивами. На фиг. 1 изображена схема подъемной установки, с помощью которой осуществляют предлагаемый способ на фиг. 2 - схема блока выдачи управлякнцих сигналов.
Устройство содержит приводной
,j шкив 1, головные канаты 2, подъемные сосуды 3, регулировочные шкивы 4, выполненные в виде цельного барабана с канавками или в виде блока шкивов, корпуса осевых подшипников 5, шток Q 6, направляющую втулку 7, исполнительный механизм 8, регулятор 9, с отрицательными обратными связями по заданию, т.е. регулятор 9 перемещает шток 6 до полного исполнения сигнад ла на его задающем входе, блок 10 вьщачи сигналов о режимах работы подъемной машины (принципиальная схема дополнительно уточнена на фиг. 2), датчик Т1 проскальзывания головных канатов и датчик 12 местонахождения подъемных сосудов.
Шкив трения 1 охвачен головными канатами 2, на которых подвешены подъемные сосуды 3. Регулировочные шкивы 4 установлены- таким образом, что их футеровки касаются ветвей головных канатов 2 и в исходном состоянии прогибают их не более 2-3°.
Корпуса осевых подшипников 5 регулировочных шкивов 4 через, например, Побразные рамы (не показаны) жестко соединяют со штоком 6, обеспечиваюпщх одновременное поступательное их движение.
На входы регулятора 9 подключены вькоды блока 10 и датчиков 11. Блок 10 представляет собой комплект датчиков (фиг. 2), которые подают сигналы о нормальном режиме работы подъемной машины, спуске груза, предохранительном или аварийном торможении и разгоне перегруженного подъемного сосуда. Для автоматической реализаций предлагаемого способа блок 10 выполнен таким образом, что появление каждого из перечисленных сигналов вызывает соответствующее дискретное изменение величины задания на входе регулятора 9, а следовательно, перемещение регули13овочных шкивов 4. Для этого на конг кретной подъемной машине,в процессе ее наладки экспериментально определяют численные значения сигналов ц(ко - х), причем tfCxp) ср (х). Cf(x.j) ; tf (х) « Ср (х) , подаваемых поочередно на задающий вход регулятора 9 и обеспечивающих отсутствие проскальзывания головных канатов, соответственно при ср(Хо) - подъеме расчетного груза, (f (х) - перегруженного сосуда, Cf(x3) - спуске грузов и Ср (х,) - предохранительном и (f(x ) - аварийном торможениях. Экспериментально установленные численные значения указанных сигналов в процессе эксплуатации задают на вход регулятора 9 в качестве дискретньк величин начального прогиба головньк дсанатов,соответствующих углам (с,,- «;,) причем о6(,( , гОбхвата приводного шкива головными ка натами, удовлетворяющим условию отсутствия проскальзьшания при: oip подъеме расчетного груза, . нормального режима эксплуатации ti, предохранительном торможенииJ аварийном торможении, af спуске груза, подъеме перегруженного сосуда.
Из изложенного (фиг. 2) следует, что задание сигналов Cf(x) - Ср(хл) на задающий вход регулятора 9, должен привести к соответствующим изменениям начальных прогибов головных канатов 2, обеспечивающих
.выполнение одного из следующих тождеств:
cfXxJsoio Ч-Сх,) S се, cf (X2)s(2
((х,) oi, « fМаксимальное значение силы сцепления головных канатов 2 с футеровкой приводного шкива 1, достигаемого за счет установления максимальной величины начального прогиба равномерно натянутых головных канатов 2, а следовательно, угол обхвата приводного шкива головными канатами дискретно задают перемещением регулировочных шкивов 4 и 5
строго в соответствии. с выполняемым режимом.подъемной машины, причем для выполнения нормальных или рабо-, чих режимов ее уменьшают до мин1шу-;
ма, а для выполнения остальных режимов соответственно увеличивают до удовлетворения расчетного условия отсутствия проскальзьшания головных канатов 2 по футеровке при выполнеНИИ этих режимов, причем в случае появления указанного процесса про-, скальзывания во время вьшолнения режима, регулировочные шкивы 4 и 5 перемещают дополнительно до полного исчезновения процесса проскальзывания .
Посредством подвижных регулировочных шкивов 4 и 5 в соответствии с сигналом Cf(x) задают всем равномерно натянутым (за счет взаимного
перемещения регулировочных шкивов
4 И 5 или за счет других уравнительных средств) головным канатом 2 минимально необходимьш поперечньй .прогиб. Величину последней выбирают по предлагаемому способу из условия (условие определяется известным уравнением Эйлера) непроскальзьшания головных канатов по футеровке приводного шкива 1 при нормальном режиме работы подъемной машины. Как известно, нормальный режим - это подъем расчетного веса груза при отсутствии сигналов о необходимости предохранительного или
аварийного торможения. Такой минимальный прогиб канатов увеличивает Btg - угол их обхвата йриводного шкива на З-З, поэтому они практически не претерпевают дополнительных изгибов при выполнении нормальных рабочих режимов, т.е. 90% времени эксплуатации они не снижают свой срок службы из-за дополнительных изгибов как на регулировочных шкивах 4, так и в приводном шкиве 1
При поступлении другого сигнала, например, о необходимости аварийног торможения при застревании подъемного сосуда 3в стволе шахты, срабатывает соответствующий датчик аварийного сигнала в блоке 10 и на задающий вход регулятора 9 вьщаст сигнал С/ (х-). Это приведет к изменению первоначально установленного состояния исполнительного механизма 8 со штоком 6. Перемещение
штока 6 вызывает одновременное пере(
мещение всех регулировочных шкивов
4 относительно пер1воначально установившегося положения. В рассматриваемом случае регулирующие шкивы 4 перемещаются в другое крайнее положение или до полного соприкосновения с регулировочными шкивами 5 противоположных ветвей головных канатов 2. Таким образом, для вьшолнения аварийного режима на подъемной машине установится максимальн ое значение начального прогиба головных канатов или обеспечивается увеличение угла обхвата приводного шкива 1 головными канатами 2с 183 до 270, т.е. резко увеличивается сила сцепления головных канатов 2 с футеровкой приводного шкива 1. Безусловно это обеспечит аварийную остановку подъемной машины за минимальное время. В случае возникновения проскальзьшания - на выходе датчика 11 появляется сигнал, который суммируется с сигналом на задающем входе регулятора 9, что приведет к дополнительному одновременному перемещению всех регулировочных шкивов 4, т.е. к увеличению между противоположно движущимся регулировочными шкивами 4 прогиба головных канатов до полного зажима . головных канатов. Зажим головных канатов 2 между противоположно отстоящими регулировочными шкивами 4 и 5 обеспечивает экстренную и аварийную остановку, практически без участия времени инерции, приведенной к валу приводного шкива 1, т.е. значительно сокращается время остановки.
После завершения аварийного торможения, машинист переводит машину на режим транспортировки расчетного груза, т.е. включает датчик нормального режима в блоке 10 (на фиг. 2 не показан). Последний своим выходным сигналом, поступающим на задающий вход регулятора 9 ранее описанным образом устанавливает минимальную величину прогиба головных канатов 2.
Появление сигнала о необходимости выполнения другого режима приведет к появлению на выходе блока 10 соответствующего этому режиму другого сигнала, который описанным уже образом вызовет одновременное дискретное изменение начального прогиба всех головных канатов. Это приведет к установлению нового значения угла обхвата, обеспечивающего безопасность и безаварийность эксплуатации подъема. В процессе эксплуатации подъемной машины экспериментально заданные -значения сигналов могут не удовлетворять условиям непроскальзывания головных канатов. В этом случае датчик 11 своим выходным сигналом дополнительно корректирует исполняемое задание регулятора 9 до полного изчезновения явления проскальзывания, т.е. дополнительно корректирует начальный прогиб головньк канатов.
Использовалие предлагаемого способа, в частности дискретное изменение величины прогиба равномерно натянутых головных канатов в соответствии с одним из поступающих сигналов о конкретном режиме работы подъемной машины и последующая корректировка заданной величины прогиба, позволит одновременно повысить безопасность и безаварийность эксплуатации многоканатной подъемной машины и увеличить срок службы головных канатов за счет осуществлени существенного снижения времени их работы с максимальным дополнительным изгибом на регулировочны шкивах.
в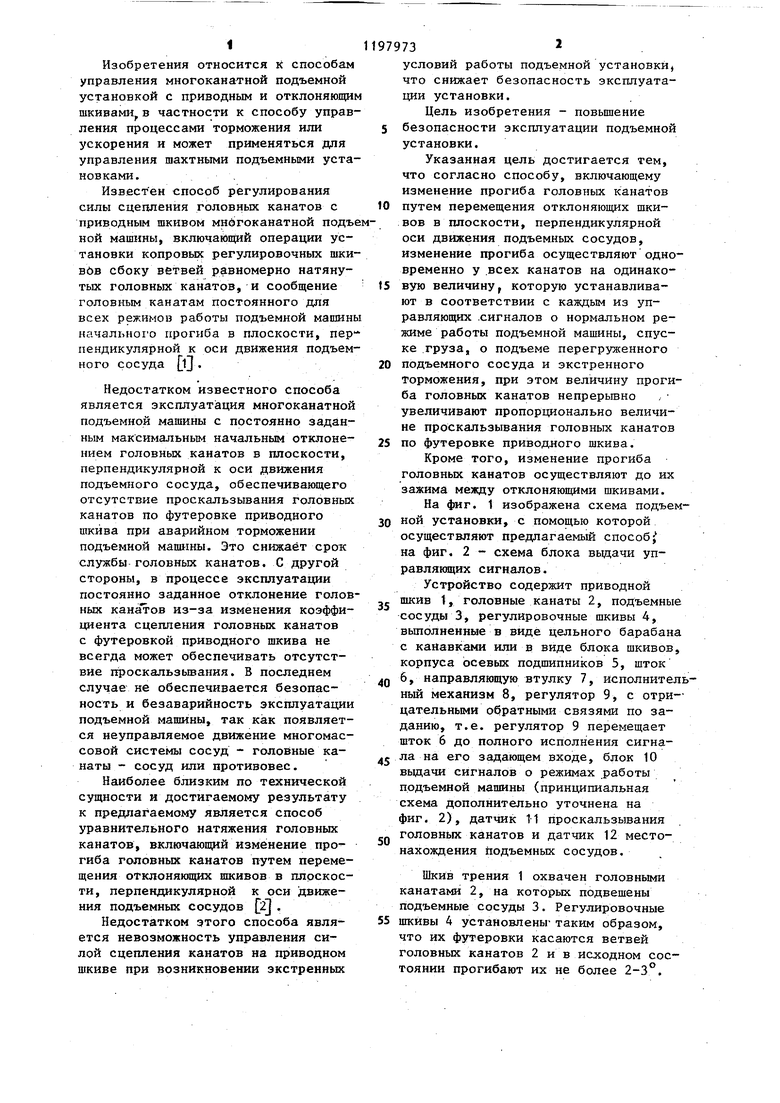
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканатная рудничная подъемная установка | 1986 |
|
SU1669844A1 |
| МНОГОКАНАТНАЯ ПОДЪЕМНАЯ УСТАНОВКА | 1996 |
|
RU2127218C1 |
| Способ регулирования процесса предохранительного торможения шахтной подъемной машины | 1983 |
|
SU1146269A1 |
| УСТРОЙСТВО ЗАЩИТЫ ШАХТНЫХ ПОДЪЕМНЫХ УСТАНОВОК ОТ ПРОСКАЛЬЗЫВАНИЯ КАНАТА | 2013 |
|
RU2553619C1 |
| Шахтная многоканатная фрикционная подъемная установка с наземным расположением машины | 1988 |
|
SU1643398A1 |
| Способ определения коэффициента трения между канатом и футеровкой шкива многоканатного фрикционного подъемника | 1985 |
|
SU1376009A1 |
| ПОДЪЕМНАЯ УСТАНОВКА | 2016 |
|
RU2634602C1 |
| Шахтная многоканатная подъемная установка | 1983 |
|
SU1117271A1 |
| Устройство для предотвращения проскаль-зыВАНия KAHATA шАХТНОгО пОд'ЕМНиКА | 1970 |
|
SU827368A1 |
| Способ наладки и контроля параметров фрикционной рудничной подъемной установки | 1978 |
|
SU943163A1 |
1. СПОСОБ УПРАВЛЕНИЯ МНОГОКАНАТНОЙ ПОДЪЕМНОЙ УСТАНОВКОЙ С ПРИВОДНЫЙ И ОТКЛОНЯНШЩМ ШКИВАМИ, включающий изменение прогиба грлов.ных канатов путем перемещения отклоняющих шкивов В плоскости, перпендикулярной оси движения подъемных сосудов. отличающийся тем, что, с целью повышения безопасности : эксплуатации подъемной установки,прогиб изменяют одновременно у всех канатов на одинакс(вую величину, которую устанавливают в соответствии с каждЕЛм из заправляющих сигналов о нормальном режиме работы подъемной машины, спуске груза, подъеме перегруженного подъемного сосуда и экстренном торможении, причем величину прогиба головных канатов непрерывно увеличивают пропорционально величине проскальзьшания головных канатов по футеровке приводного шкива. 2. Способ по п. 1, о т л и ч а ю(Л щ и и с я тем, что изменение прогиба головных канатов осуществляют с до их зажима между отклоняющими шкивами.
uz.i
фиг.г
| Найденко И.С., Белый В.Д | |||
| Шахтные многоканатные подъемные установки | |||
| М.: Недра, 1979, с | |||
| Прибор для измерения силы звука | 1920 |
|
SU218A1 |
| Устройство для регулирования рабочих натяжений канатов многоканатной подъемной установки | 1980 |
|
SU956406A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
