1
Изобретение относится к области подъемно-транспортных устройств, в частности к горнорудничным подъемникам, и может быть использовано для предотвращения проскальзывания канатов на головном шкиве трения подъемной машины.
Наиболее близким техническим решением из известных является устройство для предотвращения проскальзывания каната шахтного подъемника, содержащее контрольные шкивы трения, взаимодействующие с набегающей и со сбегающей ветвями каната, огибающего футерованный фрикционным материалом головной шкив трения подъемной машины, и блок сравнения скоростей 1.
Недостатком указанного устройства является сравнительно низкая надежность работы, обусловленная невозможностью прогнозирования проскальзывания каната на головном шкиве трения.
Цель изобретения - повышение надежности работы.
Указанная цель достигается тем, что устройство снабжено механизмом повышения тяговой способности, блоком определения проскальзывания контрольных шкивов трения, звеном совпадения, усилителем и блоком управления механизмом повышения тяговой способности, причем выход блока определения проскальзывания контрольных шкивов трения связан со входом блока управления механизмом повышения тяговой способности, а контрольные шкивы трения футерованы фрикционным материалом, одинаковым по своим физико-механическим свойствам с футеровочным материалом головного шкива. Изобретение иллюстрируется чертежами,
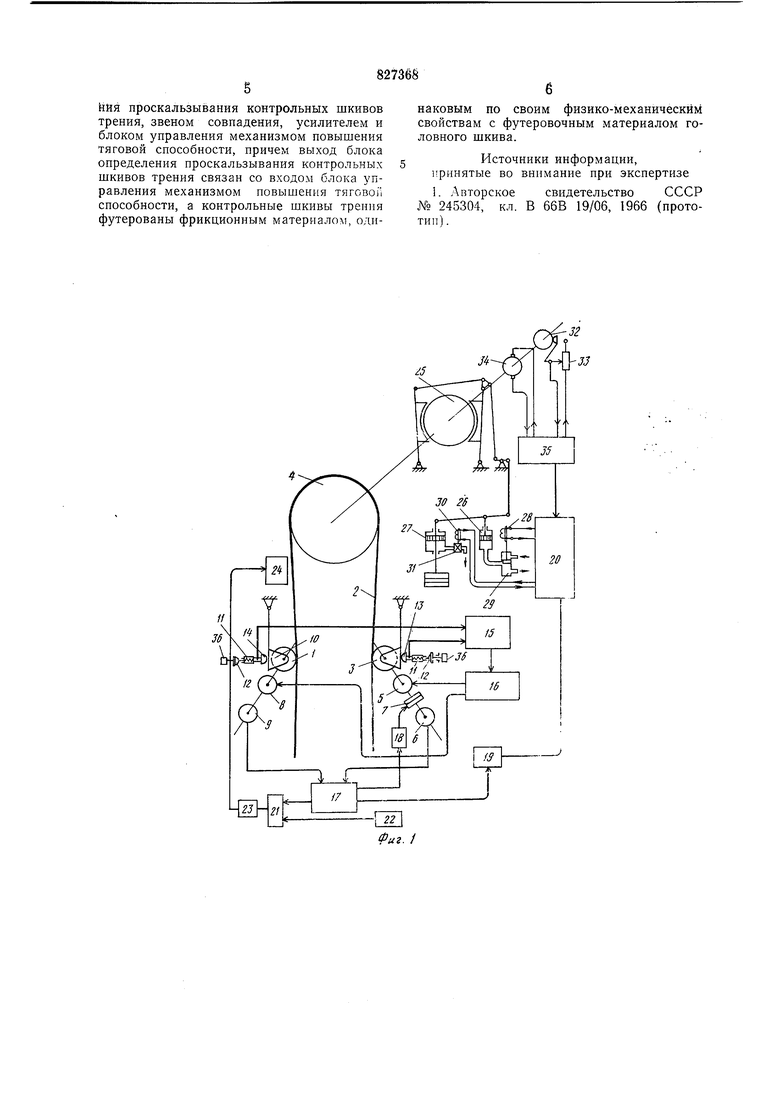
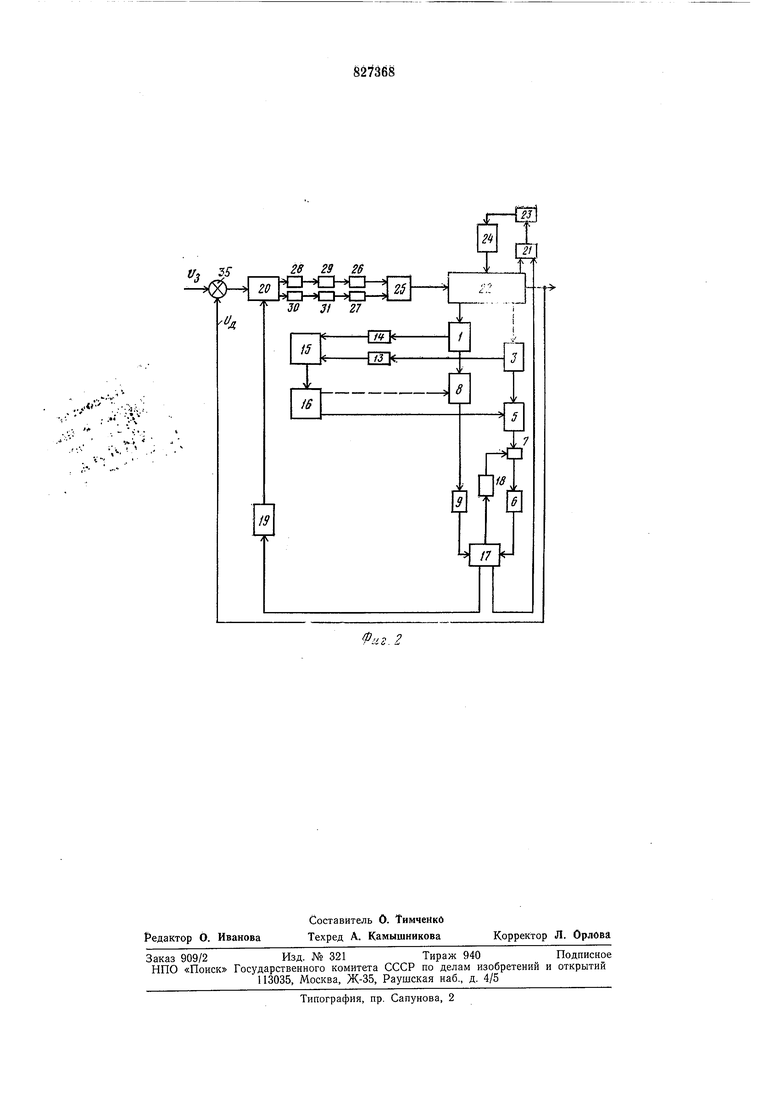
где на фиг. 1 представлена блок-схема устройства; на фиг. 2 - структурная схема устройства.
Устройство содержит контрольный шкив 1 трения, взаимодействующий с одной ветвью каната 2 подъемной машины, контрольный шкив 3 трения, взаимодействующий с другой ветвью каната 2, огибающего головной шкив 4. Шкивы 1 и 3 трения футерованы материалом, одинаковым по своим физико-механическим свойствам с футеровочным материалом головного шкива. На одной оси со шкивом 3 смонтирован тормозной механизм 5, например электродвигатель, включенный по схеме с динамическим
торможением, и датчик вращения, например сельсин-приемник 6, соединенный с общей осью через электромагнитную муфту 7. На оси со шкивом 1 смонтирован тормозной механизм 8 и датчик вращения, например
сельсин-датчик 9. Шкивы 1 и 3 установлены на шарнирных подвесках 10, снабженных пружинами 11 с регулировочным винтовым элементом 12. Шарнирные подвески 10 также снабжены датчиками 13 и 14 определения натяжения ветвей канатов. Регулировочные элементы 12 служат для создания одинаковых натяжений ветвей каната при наладке устройства, которые фиксируются по равенству напряжений, выдаваемых датчиками 13 и 14. Датчики 13 и 14 соединены с блоком 15 совпадения, который в свою очередь соединен с блоком 16 управления тормозными механизмами. Сельсии-датчик 9 и сельсинприемник 6 соединены с блоком 17 определения проскальзывания, связанным через усилитель 18 с муфтой 7, а через блок 19 корректировки тормозной системы подъемника - с блоком 20 управления тормозом подъемной машины. Кроме того, блок 17 соединен с одним входом звена 21 совпадения, другой вход которого соединен с датчиком 22 сигнализации о приближении подъемных сосудов к приемным плош,адкам ствола шахты. Выход звена 21 совпадения через усилитель 23 соединен с блоком 24 управления механизмом повышения тяговой способности. Колодочный тормоз 25 системы торможения снабжен приводом 26 рабочего торможения и приводом 27 предохранительного торможения. Привод 26 рабочего торможения функционально связан с соленоидным приводом 28 регулятора давления 29, а привод 27 предохранительного торможения - с соленоидным приводом 30 вентиля 31. Работа устройства осуществляется следуюш,им образом. Необходимая (заданная скорость) в виде параметра УЗ задается при помощи программного диска 32 с реостатом 33. Действительная скорость Уд определяется тахогенератором 34. Разность скоростей определяется в сумматоре 35, реализующем функцию блока сравнения скоростей, и подается на блок 20 управления тормозом. Колебания каната сглаживаются посредством демпфирующих элементов 36. При отклонении действительной скорости от заданной сумматор 35 выдает сигнал на блок 20, управляющий тормозом 25, при этом срабатывает привод 26 рабочего торможения. При значительном превышении скорости срабатывает привод 27 и тормоз 25 экстренно останавливает подъемную машину. Шкивы трения 1 и 3 вращаются при перемещении каната 2, а датчики 13 и 14 определяют натяжение ветвей каната, преобразуя механическое усилие в напряжение, передаваемое на блок 15 совпадения, выходной сигнал которого подается на блок 16 управления тормозными механизмами 5 и 8. В зависимости от знака разности натяжений включается механизм 5 или 8, создавая соответствующее тормозное усилие. Если последнее больше фрикционных сил, действующих между канатом и шкивами 1 или 3, то шкив, к которому приложено тормозное усилие, останавливается, в то время как другой шкив продолжает вращаться. Синхронность вращения сельсина-датчика 9 и сельсин-приемника 6 нарушается, а напряжение рассогласования подается на блок 17, посредством которого через усилитель 18 передается управляющее воздействие на муфту 7, отсоединяющую ось сельсина-приемника 6 от оси шкива 3. Так как сельсинприемпик 6 Б результате проскальзывания одного из шкивов 3, 1 находится в рассогласованном полол епии относительно сельсип-датчика 9, то сельсин-приемник 6 поворачивается до согласования с сельсин-датчиком 9. После этого муфта 7 срабатывает и сельсины начинают вращаться с одинаковой угловой скоростью вместе со шкивами 3, 1. При проскальзывании одного из шкивов 3, 1 из блока 17 через блок 19 подается импульс на блок 20 управления тормозом, который устраняет причину проскальзывания шкивов 3 или 1 путем уменьшения замедлений, создаваемых тормозом 25. Так как проскальзывание шкивов 3, 1 наступает раньше проскальзывания на головном шкиве, то устранение причин проскальзывания шкивов 3,1 позволяет устранить возможность проскальзывания на головном шкиве. При нахождении подъемного сосуда вблизи приемной площадки ствола шахты датчик 22 вырабатывает сигнал, при совпадении которого с сигналом проскальзывания на выходе блока 17 срабатывает звено 21 совпадения и через усилитель 23 включает блок 24 управления механизмом кратковременного повыщения тяговой способности подъемной машины, например путем дополнительного поджатия канатов к футеровке головного шкива. Использование устройства позволяет заранее определять возможность возникновения явления проскальзывания и так скорректировать систему автоматического торможения (рабочего и предохранительного), что будут созданы замедления подъемных сосудов, не вызывающие явления проскальзывания при работе шахтных подъемников. Формула изобретения Устройство для предотвращения проскальзывания каната шахтного подъемника, одержащее контрольные щкивы трения, взаимодействующие с набегающей и со сбегающей ветвями каната, огибающего футеованный фрикционным материалом головой шкив трения подъемной машины, и блок равнения скоростей, отличающееся ем, что, с целью повышения надежности аботы, оно снабжено механизмом повыщеия тяговой способности, блоком определеййя проскальзывания контрольных шкивов трения, звеном совпадения, усилителем и блоком управления механизмом повышения тяговой способности, причем выход блока определения проскальзывания контрольных шкивов трения связан со входом блока управления механизмом повышения тяговоп способности, а контрольные шкивы трения футерованы фрикционным материалом, одннаковым по своим физико-механическим свойствам с футеровочным материалом головного шкива. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 245304, кл. В 66В 19/06, 1966 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ предотвращения проскальзыванияКАНАТА шАХТНОгО пОд'ЕМНиКА | 1970 |
|
SU827367A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА] ТРЕНИЯ КАНАТОВФШШ SSEKPli | 1972 |
|
SU432369A1 |
| Способ определения тормозного усилия подъемной установки | 1987 |
|
SU1518261A1 |
| Многоканатная рудничная подъемная установка | 1986 |
|
SU1669844A1 |
| МНОГОКАНАТНАЯ ПОДЪЕМНАЯ УСТАНОВКА | 1996 |
|
RU2127218C1 |
| Способ регулирования процесса предохранительного торможения шахтной подъемной машины | 1983 |
|
SU1146269A1 |
| ГРУЗОВОЙ ПОДЪЕМНИК С БЕЗРЕДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И РАЗГРУЗОЧНО-ЛОВИТЕЛЬНЫМ УСТРОЙСТВОМ | 2011 |
|
RU2468982C1 |
| БЛОК КОНТРОЛЯ СКОРОСТИ И УСКОРЕНИЯ С УПРАВЛЯЕМЫМ ЭЛЕКТРОННЫМ СПОСОБОМ ПУСКОВЫМ СЕРВОМЕХАНИЗМОМ ДЛЯ ПРИМЕНЕНИЯ В ПОДЪЕМНО-ТРАНСПОРТНЫХ СРЕДСТВАХ | 2008 |
|
RU2472693C2 |
| Устройство регулирования процесса предохранительного торможения шахтной многоканатной подъемной машины | 1986 |
|
SU1442493A1 |
| Устройство для предохранительного торможения канатной подъемной установки | 1985 |
|
SU1286490A1 |
S
.. ::-.-u;.
- ;-.V
