2. Механизм поп.1,отличаиг щ и и с я тем, что, с целью обеспечения возможностн работы в режиме редуктора, он снабжен установленным с возможностью вращения н взаимного осевого смещения в зависимости от
величины эксцентриситета в корпусе двумя дополнительными дисками, на обращенных друг к другу торцах которых выполнены встречно направленные конические поверхности, взаимодействующие с гибкой связью.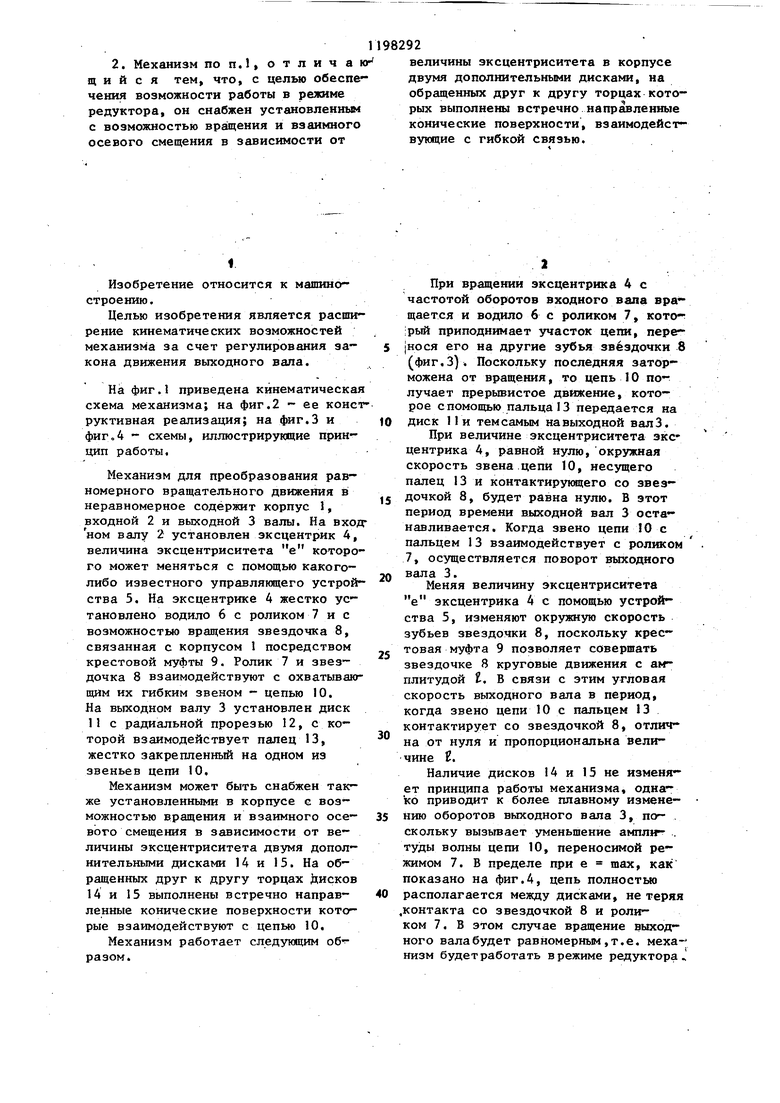
| название | год | авторы | номер документа |
|---|---|---|---|
| Фрикционный вариатор | 1977 |
|
SU752076A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ КОНДИТЕРСКИХ ПЛАСТОВ | 1994 |
|
RU2101957C1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820104A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ ДВИЖЕНИЕ И НАОБОРОТ | 2005 |
|
RU2310115C2 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВЕРТИКАЛЬНО-ПОСТУПАТЕЛЬНОЕ ПЕРЕМЕЩЕНИЕ | 2000 |
|
RU2199045C2 |
| Импульсный вариатор скорости | 1985 |
|
SU1270457A2 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2102642C1 |
| Механизм регулируемого эксцентрикового узла | 1989 |
|
SU1700294A1 |
| "Универсальный токарно-фрезерный станок "Короед-3" | 1991 |
|
SU1838093A3 |
МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИ РАВНОМЕРНОГО ВРАПЛАТЕЛЬНОГО ДВИЖЕНИЯ В НЕРАВНОМЕРНОЕ, содержащий корпус, входной и выходной валы, водило с размещенным на нем роликом, звездочку и охватывающее ее и ролик гибкое звено, отлич ающийся тем, что с целью расширения кинематических возможностей за счет регулирования закона движения выходного вала, механизм снабжен крестовой муфтой, эксцентриком с регулируемой величиной эксцентриситета, установленным на входном валу, и диском с радиальной прорезью, установленным на выходном валу, водило установлено на эксцентрике жестко, звездочка - с возможностью вращения и через крестовую муфту связана: с корпусом, .а гибкое звено имеет палец, взаимодействующий с радиальной прорезью.
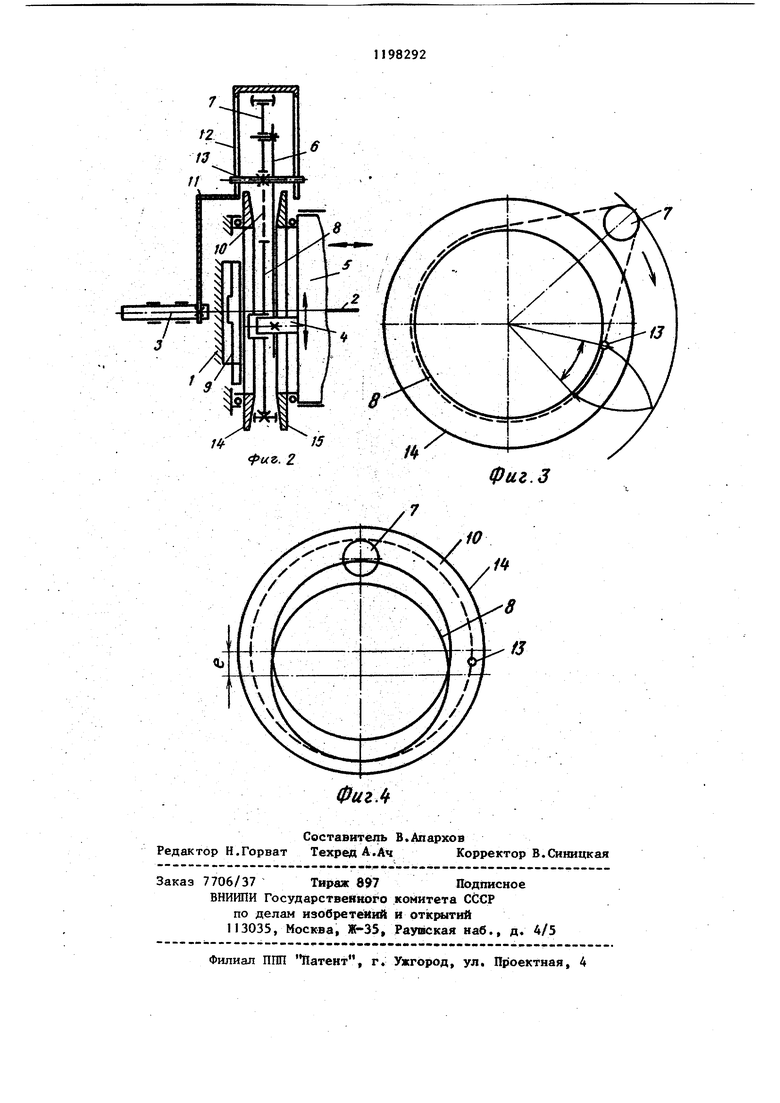
Изобретение относится к машиностроению. Целью изобретения является расши рение кинематических возможностей механизма за счет регулирования закона движения выходного вала. На фиг.1 приведена кинематическа схема механизма; на фиг.2 - ее конс руктивная реализация; на фиг.З и фиг.4 - схемы, иллюстрирующие принцип работы, Механизм для преобразования равномерного вращательного движения в неравномерное содержит корпус 1, входной 2 и выходной 3 валы. На вхо ном валу 2 установлен зксцентрик 4, величина эксцентриситета е которо го может меняться с помощью какоголибо известного управляющего устрой ства 5. На эксцентрике 4 жестко установлено водило 6 с роликом 7 и с возможностью вращения звездочка 8, связанная с корпусом 1 посредством крестовой муфты 9. Ролик 7 и звездочка 8 взаимодействуют с охватываю щим их гибким звеном - цепью 10. На выходном валу 3 установлен диск 11 с радиальной прорезью 12, с которой взаимодействует палец 13, жестко закрепленный на одном из звеньев цепи 10. Механизм может быть снабжен также установленными в корпусе с возможностью вращения и взаимного осевого смещения в зависимости от величины эксцентриситета дополнительными дисками 14 и 15. На обращенных друг к другу торцах фисков 14 и 15 выполнены встречно направ- ленные конические поверхности которые взаимодействуют с цепью 10. Механизм работает следующим образом. При вращении эксцентрика 4 с частотой оборотов входного вала вращается и водило б с роликом 7, кото- :рый приподнимает участок цепи, пере|нося его на другие зубья звёздочки 8 (фиг.З). Поскольку последняя заторможена от вращения, то цепь 10 получает прерьшистое движение, которое с помощью пальца 13 передается на диск 11и тем самым на выходной валЗ. При величине эксцентриситета эксцентрика 4, равной нулю, окружная скорость звена цепи 10, несущего палец 13 и контактирукицего со звездочкой 8, будет равна нулю. В этот период времени выходной вал 3 останавливается. Когда звено цепи 10 с пальцем 13 взаимодействует с роликом 7, осуществляется поворот выходного вала 3. Меняя величину эксцентриситета е эксцентрика 4 с помощью устройства 5, изменяют окружную скорость зубьев звездочки 8, поскольку крестовая муфта 9 позволяет совершать звездочке 8 круговые движения с амплитудой Е. В связи с этим угловая скорость выходного вала в период, когда звено цепи 10 с пальцем 13 контактирует со звездочкой 8, отлична от нуля и пропорциональна величине Е. Наличие дисков 14 и 15 не изменяет принципа работы механизма, однако приводит к более плавному изменению оборотов выходного вала 3, по- . скольку вызывает уменьшение ампл1г- . туды волны цепи 10, переносимой режимом 7. В пределе при е max, как показано на фиг.4, цепь полностью располагается между дисками, не теряя контакта со звездочкой 8 и роликом 7. В этом случае вращение выходного вала будет равномерным , т.е. меха- низм будетработать в режиме редуктора,
| Механизм шагового поворота | 1980 |
|
SU949253A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Механизм для преобразования непрерывного вращательного движения во вращательное движение с остановками | 1973 |
|
SU765572A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
