QD
;о
О)
со Изобретение относится к машиностроению, в частности к манипуляторам, предназначенным для обслуживания различных технологических процессов. Целью изобретения является уменьшение габаритов и массы манипулятора путем использования многопоточных зубчатых передач. На чертеже изображена кинематическая схема кисти манипулятора. Кисть манипулятора содержит основание 1, корпус 2, сменный инструмент 3 и привод сменного инструмента и поворота корпуса, включаюш,ий в себя--двигатели 4 и 5, приводной вал б.сменного инструмента и дифференциальнь1Й механизм, составленный из центральных колес 7 и 8 и сателлитов 9. Корпус 2 выполнен с зубчатым венцом внутреннего зацепления и связан посредством зубчатых колес 10-12 с двигателем 5. Приводной вал 6 сменного инструмента связан с осью сателлитов 9 дифференциального механизма, центральное колесо 8 которого посредством колес 13 и 14 связано с двигателем 4, а центральное колесо 7 посредством зубчатых колес 15, 16, 17 и 12 связано с двигателем 5. Многопоточность передач обеспечена тем, что в устройстве имеется по меньшей мере три пары зубчатых колес 10 и 15 и три сателлита 9. Подбор передаточных отношений в кинематических цепях производится из условия обеспечения кинематической развязки каждой степени подвижности кисти. Сменный инструмент (захватное устройство) содержит корпус 3, который закреплен на корпусе 2 кисти, ведуш,ие рычаги 18, ведомые рычаги 19 и зажимные губки 20. Ведушие рычаги 18 связаны с валом 6 через полумуфты 21 и 22, червяк 23 и зубчатые секторы 24. Предлагаемое устройство работает следуюшим образом. Для захвата объекта включается двигатель 4, который через зубчатые колеса 14, 13, 8 и 9 врашает вал 6 и соединенный с ним червяк 23, сдвигая губки захватного устройства. Для ориентации объекта включается двигатель 5, который через зубчатые колеса 12, 17, II и 10 вращает корпус 2 кисти вместе с установленным на нем захватным устройством, а через зубчатые колеса 12, 17, 16, 15, 7 и 9 врашает вал 6. Равенство передаточных отношений кинематических цепей привода сменного инструмента и врашения корпуса кисти обеспечивает неизменное расстояние между губками при работе двигателя 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1988 |
|
SU1537528A1 |
| Рука манипулятора | 1985 |
|
SU1256961A1 |
| ПРИВОД ЗАХВАТНОГО УСТРОЙСТВА | 1996 |
|
RU2110721C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| Захватное устройство | 1987 |
|
SU1468744A2 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Кисть исполнительного органа манипулятора | 1984 |
|
SU1171309A1 |
| Рука манипулятора | 1985 |
|
SU1252167A1 |
| Захватное устройство | 1989 |
|
SU1660955A1 |
КИСТЬ МАНИПУЛЯТОРА, содержащая основание, корпус с рабочим инструментом и привод поворота корпуса и вращения приводного вала рабочего инструмента, снабженный дифференциальным механизмом и установленными на основании двумя двигателями, первый из которых разветвленной кинематической цепью связан с корпусом кисти и одним центральным колесом дифференциального механизма, а второй - с другим центральным колесом дифференциального механизма, ось сателлитов которого кинематически связана с приводным валом рабочего инструмента, отличающаяся тем, что, с целью уменьщения габаритов и массы, дифференциальный механизм выполнен с цилиндрическими колесами, а разветвленная кинематическая цепь выполнена в виде двух многопоточных передач с промежуточными зубчатыми колесами, ведущие зубчатые колеса которых установлены жестко на полом соосном с корпусом валу, кинематически связанном с первым двигателем, причем внутри этого вала размещен вал, кинематически связывающий второй двигатель с другим центральным колесом дифференциального механизма, при этом промежуточные зубчатые колеса каждого потока установлены на осях, жестко связанных между собой и с основанием, и входят в зацепление с центральным зубчатым колеi сом внутреннего зацепления, жестко связанным с корпусом кисти и одним из цент(П ральных колес дифференциального механизма.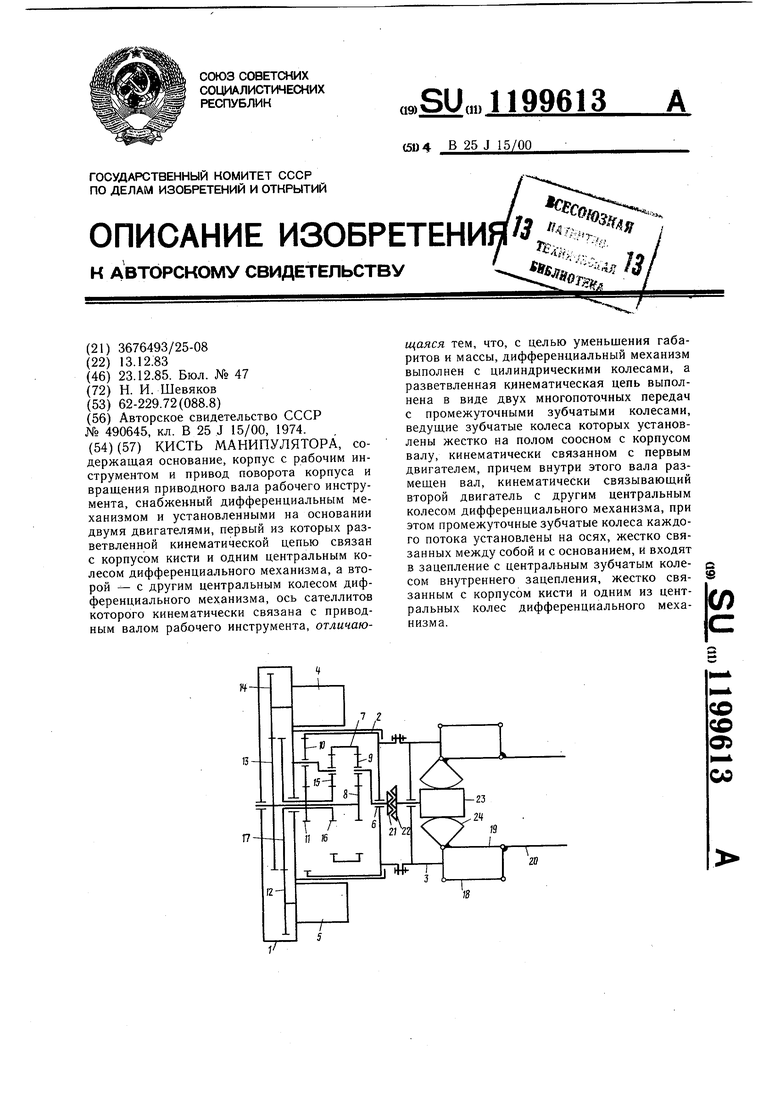
| Кисть промышленного робота | 1974 |
|
SU490645A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
