wwwvw
(Л
с
00
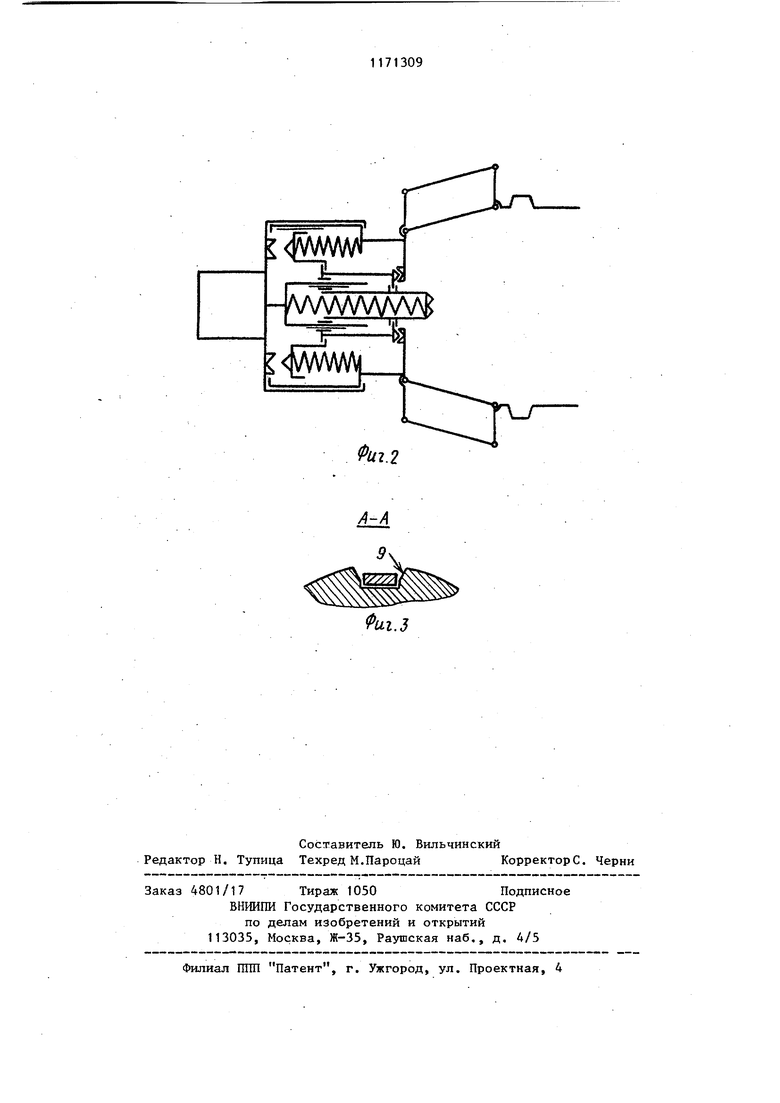
о ;о . /.. I Изобретение относится к машиностроению, а именно к манипуляторам, оснащенным сменным инструментом. Цель изобретения - повышение надежности в работе кисти. На фиг. 1 показана кисть в положе НИИ захвата инструмента; на фиг. 2 кисть в разжатом состоянии; на фиг. 3 - сечение А-А на фиг. 1. Кисть содержи корпус 1, на котором закреплен привод 2 ротации с выходным валом 3. Вал 4 ротации установлен в корпусе 1 с возможностью вращения. Захват содержит две губки 5, установленные на рычагах 6, которые шарнирно установлены на валу .4 ротации и соединены с приводом губок захвата (не- показано). Сменный инструмент, например щетка, содержит корпус 7, на котором выполнены фик- сирующие выступы 8 и направляющие па зы 9, взаимодействующце с ответными элементами на губках 5кисти. В корпусе 7 установлены приводной вал 1Q и выходной вал 1.1 , которые, соединеныче рез повышающую планетарную передачу 12 Рабочий орган сменного инструмента - щетка 13 закреплена на валу 11 В исходном положении сменньвй инструмент уложен в кассету 14. -Механизм переключения содержит три муфты, в состав которых входит три неподвижные полумуфты 15-17, установленные соответственно на валу 4 ротации, на приводном валу 10 и на корпусе 1 ;кисти, и три кинематически связанные между собой подвижные полумуфты 18-20. Полумуфты 18 и 19 устайовлены на выходном валу 3 привода ротаций с возможностью продольного перемещения, например на шлицах,причем шпицевой венец полумуфты 19 укороченный а шлицевое сопряжение выполнено с зазором. Полумуфта 20 установлена на шлицах на валу 4 ротации. Кинематическая связь полумуфт 18 и 19 обес печена взаимодействием диска, выполненного на полумуфте 18, и кольцевой канавки, выполненной на полумуфте 19, а кинематическая связь полумуфт 19 и 20 обеспечена взаимодействием бурта полумуфты 19 и торца полумуфты 20, Пружина 21 обеспечивает замкнутое положение полумуфт 15 и 18 и разомкнутое положение полумуфт 17 и 20 при работе без сменного инструмента. При работе со сменным ин-; струментом пружина 22 обеспечивает 092 замкнутое положение полумуфт 17 и 20, а пружина 21 - замкнутое положение полумуфт 16 и 19. В предварительно поджатом состоянии усилие пружины 21 больше, чем пружины 22. Устройство работает без сменного инструмента следующим образом. Управляя приводами манипулятора, оператор подводит- кисть к объекту работы. Для захвата объекта включается привод захвата (не показан), который поворачивает рычаги 6 и сдвигает установленные на них губки 5 захвата. Угловая ориен-тация объекта осуществляется включением привода 2 ротации, который через вал 3 и полумуфты 18 и 15 поворачивает вал 4 ротации вместе с губками 5 захвата изажатьм между ними объектом . Для стыковки со сменным инструментом oYiepaTop, управляя приводами манипулятора, совмещает полумуфты 16 и 19 и сдвигает кисть до упора вала 4 ротации в корпус 7 сменного инструмента (смещению сменного инструмента препятствует кассета 14), при этом полумуфта 18 выводится из зацепления с полумуфтой 15, а полумуфта 20, перемещаясь под действием пружины 22 вслед за буртом полумуфты 18, входит в зацепление с полумуфтой 17, после чего оператор вклйчением привода губок захвата фиксирует сменный инструмент на кисти. Продольным движением кисти сменный инструмент извлекается из кассеты 14, а затем рабочий орган щетка 13 подводится к поверхности, которая нуждается в очистке, и включением привода 2 ротации через валЗ, полумуфты 19 и 16, вал 10, план.етарную передачу 12 и вал 11 приводится во вращение, обеспечивая выполнение рабочей операции - очистки. Возможная несоосность валов 3 и 10 не препятствует зацеплению полумуфт 19 и 16, поскольку полумуфта 19 может прокачиваться относительно вала 3 на укороченном шлицевом венце. После выполнения рабочей операции сменный инструмент вводится в кассету 14, губки 5 захвата раздвигаются и кисть отводится от сменного инструмента, при этом под действием пружины 21 происходит размыкание полумуфт 17 и 20 к замыкание полумуфт 15 и 18, после чего кисть готова к работе без сменного инструмента.
VWW-
| название | год | авторы | номер документа |
|---|---|---|---|
| Кисть исполнительного органа манипулятора | 1979 |
|
SU772840A1 |
| Кисть манипулятора | 1983 |
|
SU1199613A1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Устройство для автоматической смены инструментальных блоков роторно-конвейерных линий | 1983 |
|
SU1161322A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Рабочая клеть прокатного стана | 1985 |
|
SU1296247A1 |
| Захватное устройство | 1986 |
|
SU1449340A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
КИСТЬ ИСПОЛНИТЕЛЬНОГО ОРГАНА МАНИПУЛЯТОРА, содержащая захват, привод ротации, вал ротации и механизированный сменный инструмент, фиксируемый на кисти рубками захвата. отличающаяся тем, что, с целью повышения надежности в работе, она снабжена механизмом переклюI чения, содержапцм три муфты, каждая из которых содержит подвижную и неподвижную полумуфты, причем неподвижные полумуфты установлены на валу ротации, приводном валу и корпусе кисти, а подвижные полумуфты установлены на выходном валу и на валу ротации с возможностью продольного перемещения и кинематически связаны между собой.
fez.J
| Кисть исполнительного органа манипулятора | 1979 |
|
SU772840A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
