/.
т
I ii .itlii
ю
сд
Слд
/ и / ./7|6ijL i, 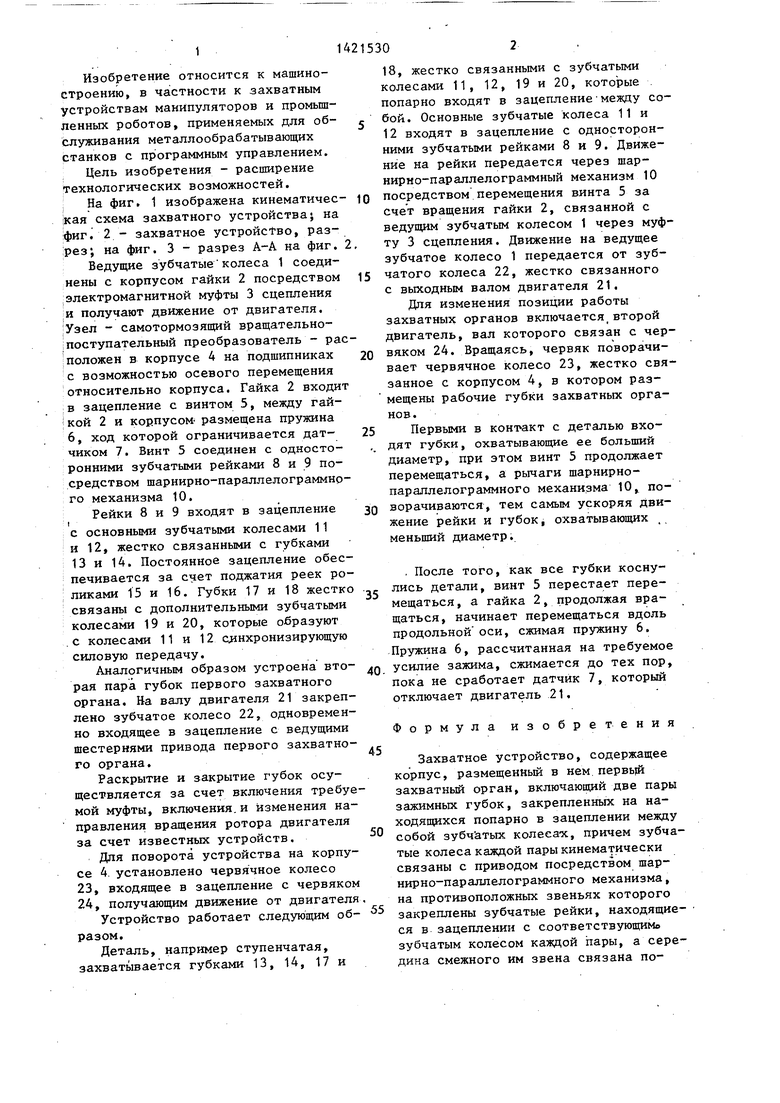
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1986 |
|
SU1323371A1 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Правильно-растяжная машина | 1975 |
|
SU566657A1 |
| Захватное устройство | 1985 |
|
SU1283092A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| УСТАНОВКА ДЛЯ СВАРКИ ТЕПЛООБМЕННИКОВ С ЛЕПЕСТКОВЫМИ ПОВЕРХНОСТЯМИ НАГРЕВА | 1994 |
|
RU2041040C1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
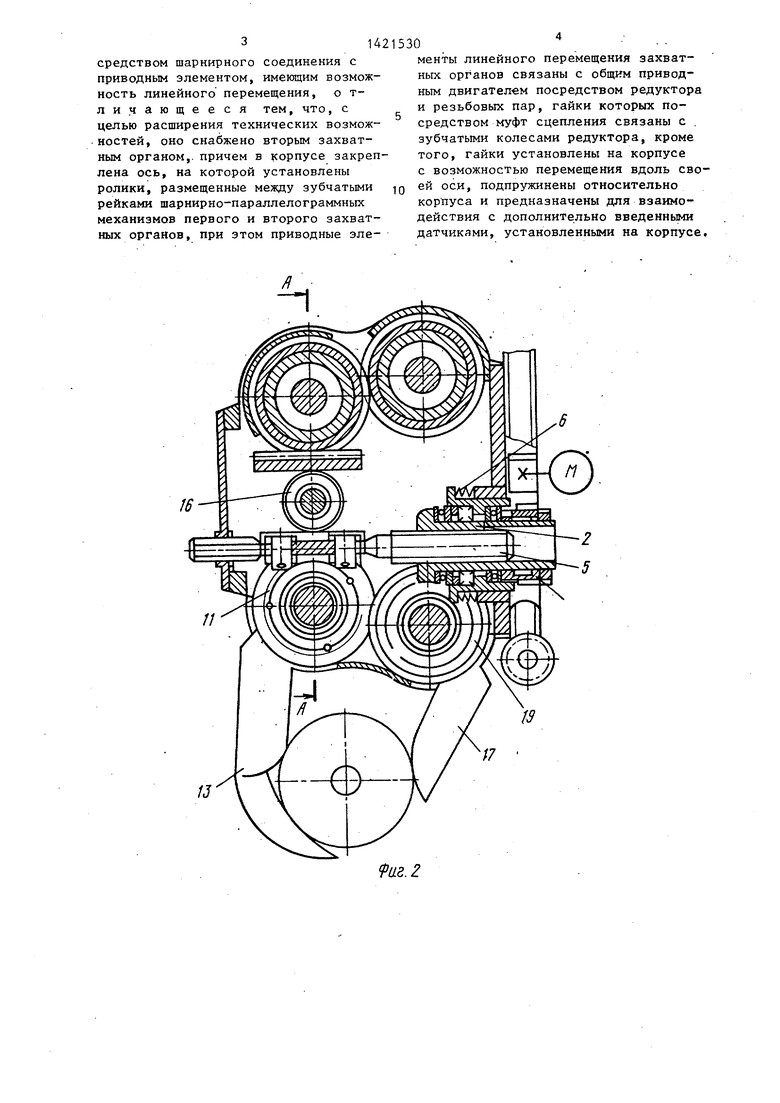

Изобретение относится к области машиностроения, в частности к захватным устройствам манипуляторов и промьшшенных роботов , применяемых для обслуживания металлорежущих станков. Целью изобретения является расширение технологических возможностей. Движение на рейки 8 и. 9 передается через шарнирно-параллелограммный механизм 10 посредств ом перемещения винта 5 за .счет вращения гайки 2, связанной с ведущим зубчатым колесом 1через муфту 3 сцепления. Между рейками первого и второго зах1ватных органов размещены ролики 15 и 16. После касания всех губок детали винт 5 прекращает перемещение, а гайка 2перемещается вдоль продольной оси, сжимая пружину 6 до тех пор, пока не сработает датчик 7, который отключает двигатель 21. 3 ил. Q 9
Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов и промьш- ленных роботов, применяемых для обслуживания металлообрабатывающих станков с пр ограммным управлением.
Цель изобретения - расширение технологических возможностей.
На фиг. 1 изображена кинематическая схема захватного устройства; на ;фиг. 2 - захватное ycтpoйctвo, разрез; на фиг. 3 - разрез А-А на фиг.
Ведущие зубчатые колеса 1 соединены с корпусом гайки 2 посредством электромагнитной муфты 3 сцепления я получают движение от двигателя. ;Узел - самотормозящий вращательно- ;поступательный преобразователь - рас :положен в корпусе 4 на подшипниках с возможностью осевого перемещения относительно корпуса. Гайка 2 входит в зацепление с винтом 5, между гай- i кой 2 и корпусом- размещена пружина 6, ход которой ограничивается датчиком 7. Винт 5 соединен с односторонними зубчатыми рейками 8 и 9 посредством шарнирно-параллелограммно- го механизма 10.
Рейки 8 и 9 входят в зацепление I с основными зубчатыми колесами 11
и 12, жестко связанными с губками 13 и 14. Постоянное зацепление обеспечивается за счет поджатия реек роликами 15 и 16. Губки 17 и 18 жестко связаны с дополнительными зубчатыми колесами 19 и 20, которые образуют .с колесами 11 и 12 синхронизирующую силовую передачу.
Аналогичным образом устроена вторая пара губок первого захватного органа. На валу двигателя 21 закреплено зубчатое колесо 22, одновременно входящее в зацепление с ведущими шестернями привода первого захватного органа.
Раскрытие и закрытие губок осуществляется за счет включения требуемой муфты, включения, и изменения направления вращения ротора двигателя за счет известных устройств.
Для поворота устройства на корпусе 4. установлено червячное колесо
23,входящее в зацепление с червяком
24,получающим движение от двигателя Устройство работает следующим образом.
Деталь, например ступенчатая, захватывается губками 13, 14, 17 и
0
5
0
5
0
5
0
5
0
5
18, жестко связанными с зубчатыми колесами 11, 12, 19 и 20, которые . попарно входят в зацепление-между собой. Основные зубчатые колеса 11 и 12 входят в зацепление с односторонними зубчатыми рейками 8 и 9. Движение на рейки передается через шар- нирно параплелограммный механизм 10 посредством перемещения винта 5 за счет вращения гайки 2, связанной с ведущим зубчатым колесом 1 через муфту 3 сцепления. Движение на ведущее зубчатое колесо 1 передается от зубчатого колеса 22, жестко связанного с выходным валом двигателя 21.
Для изменения позиции работы захватных органов включается второй двигатель, вал которого связан с червяком 24. Вращаясь, червяк поворачивает червячное колесо 23, жестко связанное с корпусом 4, в котором размещены рабочие губки захватных органов.
Первыми в контакт с деталью входят губки, охватывающие ее больший диаметр, при этом винт 5 продолжает перемещаться, а рычаги щарнирно- параллелограммного механизма 10, поворачиваются, тем самым ускоряя движение рейки и губок, охватывающих меньший диаметр.
, После того, как все губки коснулись детали, винт 5 перестает перемещаться , а гайка 2, продолжая вращаться, начинает перемещаться вдоль продольной оси, сжимая пружину 6.
Пружина 6, рассчитанная на требуемое усилие зажима, сжимается до тех пор, пока не сработает датчик 7, который отключает двигатель 21.
Формула изобретения
Захватное устройство, содержащее корпус, размещенный в нем первьй захватный орган, включающий две пары зажимных губок, закрепленных на находящихся попарно в зацеплении между собой зубч атых колесатс, причем зубчатые колеса каждой пары кинематически связаны с приводом посредством шар- нирно-параллелограммного механизма, на противоположных звеньях которого закреплены зубчатые рейки, находящиеся в зацеплении с соответствующимо зубчатым колесом каждой пары, а середина смежного им звена связана по3142
средством шарнирного соединения с приводным элементом, имеющим возможность линейного перемещения, о т- ли чающееся тем, что, с целью расширения технических возможностей, оно снабжено вторым захватным органом,, причем в корпусе закреплена ось, на которой установлены ролики, размещенные между зубчатыми рейками шарнирно-параллелограммных механизмов первого и второго захватных органов, при этом приводные эле/J
530
менты линейного перемещения захватных органов связаны с общим привод- ньм двигателем посредством редуктора и резьбовых пар, гайки которых посредством муфт сцепления связаны с зубчатыми колесами редуктора, кроме того, гайки установлены на корпусе с возможностью перемещения вдоль своей оси, подпружинены относительно корпуса и предназначены для взаимодействия с дополнительно введенньпот датчиками, установленными на корпусе.
аг.2
fliZ.3
| Захватное устройство | 1984 |
|
SU1196261A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
