1
Изобретение относится к манипуляторостроению.
Известна кисть промышленного робота, содержащая приводные валы вращения захвата, связанные посредством промежуточного блока шестерен с осью захвата.
Недостатком известной кисти является самопроизвольный разворот захвата относительно его продольной оси, когда по программе необходим только поворот захвата в вертикальной плоскости.
С целью устранения указанного недостатка предлагаемая кисть снабжена дифференциальным механизмом, одно из солнечных колес которого встроено в кинематическую цепь, связывающую вал приводного механизма поворота захвата в вертикальной плоскости с осью захвата, а другое солнечное колесо кинематически связано с валом приводного механизма вращения захвата относительно его продольной оси, причем вал сателлитов жестко связан с валами солнечных колес.
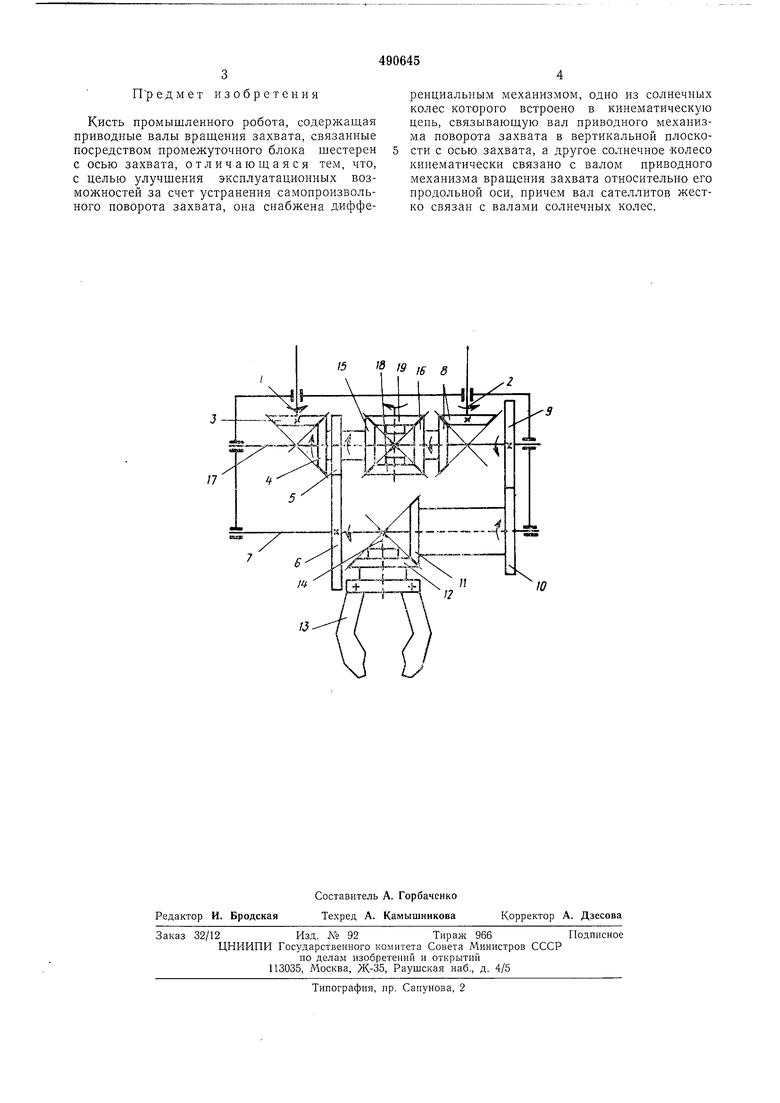
На чертеже показана кинематическая схема предлагаемой кисти промыщлепного робота.
Кисть состоит из вала 1, приводного механизма поворота захвата в вертикальной плоскости, вала 2, приводного механизма вращения захвата относительно его продольной оси (приводные механизмы на чертеже не показаны), шестерен 3-6, оси 7 поворота захвата в вертикальной плоскости, шестерен 8, дифференциального механизма, шестерни 9, промежуточного блока шестерен 10, II, шестерен 12, захвата 13 и продольной оси поворота 14 захвата.
Дифференциальный механизм включает в себя солнечное колесо 15, конструктивно соединенное в один блок с шестернями 4, 5, солпечное колесо 16, соединенное в один блок с шестерней 8, вал 17 с закрепленными на нем сателлитами 18, 19 и шестерней 9.
Кисть промышленного робота работает следующим образом.
Поворот вала 1 передается по кинематической цепи 3, 4, 5 и 6 на ось 7, осуществляя поворот захвата 13 в вертикальной плоскости на заданный угол. Одновременно новорачивается
солнечное колесо 15, а с ним и сателлиты 18, 19, обкатываясь по неподвижному солнечному колесу 16. При этом поворачивается вал 17 с щестерней 9, заставляя повернуться промежуточный блок шестерен 10, 11 на тот же угол в
том лее направлении. Благодаря этому не происходит обкатки шестерни 12 по шестерне И промежуточного блока шестерен 10, 11, а, следовательно, не происходит самопроизвольного разворота захвата 13 относительно оси 14.
едмет изобретения
Кисть промышленного робота, содержащая приводные валы вращения захвата, связанные посредством промежуточного блока щестерен с осью захвата, отличающаяся тем, что, с целью улучшения эксплуатационных возможностей за счет устранения самопроизвольного поворота захвата, она снабжена дифференциальным механизмом, одно из солнечных колес которого встроено в кинематическую цепь, связывающую вал приводного механизма поворота захвата в вертикальной плоскости с осью захвата, а другое солнечное «олесо кинематически связано с валом приводного механизма вращения захвата относительно его продольной оси, причем вал сателлитов жестко связан с валами солнечных колес.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| МЕХАНИЗМ ПОВОРОТА | 1996 |
|
RU2093453C1 |
| Планетарная головка для абразивной обработки плоских поверхностей | 1989 |
|
SU1611703A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Манипулятор | 1983 |
|
SU1094734A1 |
| СПОСОБ ОСЕВОГО ВРАЩЕНИЯ И ПРОДОЛЬНОГО ПЕРЕМЕЩЕНИЯ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279940C1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| Станок для нарезания конических зубчатых колес с эвольвентными продольными очертаниями зубцов посредством шестернеподобного инструмента методом обкатки | 1948 |
|
SU82667A1 |
W
