2. Передача по п. 1, о т л и-чающаяся .тем, что, с целью автоматической регулировки натяжения гибкой связи, ползун соединен с приводом посредством двуплечих рычагов, закрепленных
1201592
средней частью шарнирно на ползуне, одними концами - на приводе, а другими - взаимодействуюпщми с копиром, копир на ползуне установлен с возможностью перемещения посредством цилиндрических стержней.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| МАШИНА ДЛЯ ШТАМПОВКИ СЕТКИ ИЗ ЛИСТОВОГО МАТЕРИАЛА | 2001 |
|
RU2202428C2 |
| Электроэрозионный станок | 1980 |
|
SU948598A1 |
| МЕХАНИЗМ КАЧАТЕЛЬНОГО ДВИЖЕНИЯ БОЙКОВ РАДИАЛЬНО-ОБЖИМНОЙ МАШИНЫ | 1991 |
|
RU2047416C1 |
| Устройство В.И.Васильева для штамповки деталей из листового материала | 1986 |
|
SU1388166A1 |
| Станок для пробивки в ленте отверстий и последующей намотки ее в рулон | 1979 |
|
SU1114322A3 |
| СТАНОК ДЛЯ ГИБКИ ИЗДЕЛИЙПРОКАТА | 1971 |
|
SU320326A1 |
| Ручной кантователь | 1982 |
|
SU1026921A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| Устройство для изготовления ремней | 1990 |
|
SU1715708A1 |
1. ПЕРЕДАЧА С ГИБКОЙ СВЯЗЬЮ, содержащая станину с ползуном, ведущий и ведомый элементы и взаимодействующую с ними гибкую связь, отличающаяся тем, что, с целью расширения функциональных возможностей путем сообщения ведомому элементу прямолинейного возвратно-поступательного движения при сохранении постоянного передаточного отношения, она снабжена соединенным с ползуном приводом, установленным на ползуне копиром, имеющим паз, роликом, размещенным в пазу копира с возможностью перемещения, и тягой, соединяющей ролик с ведущим элементом, а ведомый элемент установлен на ползуне.
1
Изобрете;и е относится к машиностроению, в частности, к передачам с гибкой связью и может быть использовано в передачах с прямолинейным возвратно-поступательным движением ведомого элемента относительно ведущего при постоянном или автоматическом натяжении гибкого элемента. .
Цель изобретения - расширение функциональных возможностей путем сообщения ведомому элементу прямолинейного возвратно-поступательного движения при сохранении постоянного передаточного отношения и автоматическая регулировка натя- . жения гибкой связи.
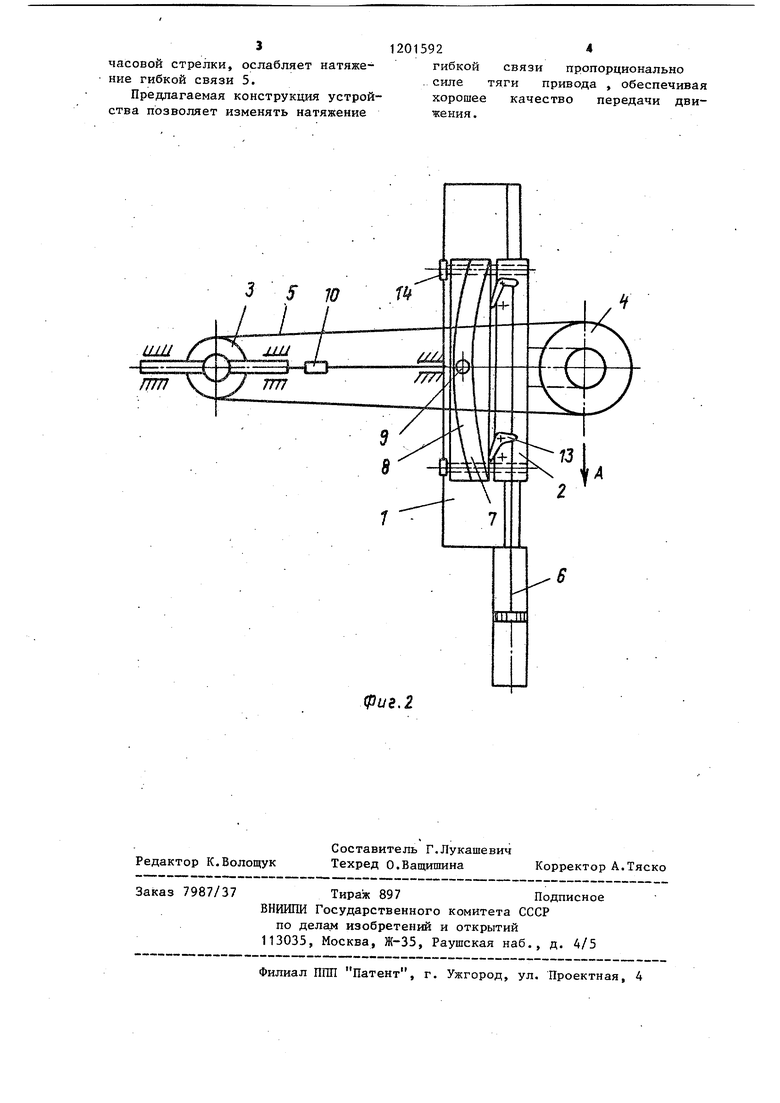
На фиг. 1 изображена передача с ручной регулировкой натяжения гибкой связи, общий вид; на фиг. 2то же, с автоматической регулировкой натяжения гибкой связи.
Передача с гибкой связью содержит станину 1 с ползуном 2, ведущий 3 и ведомый 4 элементы и взаимодействующую с ними гибкую связь 5, привод 6, соединенный с ползуном 2, копир 7, установленный на ползуне 2 и имеющий паз 8, ролик 9, размещенный в пазу 8 копира 7 с возможностью перемещения, тягу 10, соединяющую ролик 9 с ведущим элементом 3, при этом ведомый элемент 4 установлен на ползуне 2. На копире 7 установлены выставочные винты 11 и винты-12 для ручной регулировки натяжения гибкой связи 5
При варианте автоматической регулировки натяжения гибкой связи (фиг. 2) ползун 2 соединен с приводом 6 посредством двуплечих рычагов 13, закрепленных средней частью шарнирно на ползуне 2 и одними концами на приводе 6, а другими концами взаимодействующими с копиром 7, а сам копир 7 на ползуне 2 установлен с возможностью перемещения через цилиндрические стержни 14.
Устройство работает следующим образом.
Ползун 2 (фиг. 1), перемещаясь с помощью привода 6 по направляющим (не показаны) станины 1, сообщает ведомому элементу 4 прямолинейное возвратно-поступательное движение. При этом ролик 9, находящийся в пазу 8 копира 7, через Тягу 10 перемещает ведущий элемент
5 3 в направлении, перпендикулярном движению ползуна 2. Тяга 10 выполнена конструктивно так, что может менять свою длину, что используется для смены гибкой связи и его
0 натяжения. Регулировка натяжения гибкой связи 5 осуществляется с помощью тяги 10 путем изменения ее длины, а также с помощью выставочных винтов 11 и регулировочных винтов 12. Достигнутая при этом сила натяжения при небольших нагрузках . на ведомом элементе 4 поддерживается постоянной в течение определенного периода работы передачи. Б
Q случае ослабления натяжения гибкой связи выполняется дополнительная подрегулировка описанным способом. При автоматической регулировке (фиг. 2) при перемещении ползуна 2 по стрелке А привод 6 подает пол/зун 2. вниз (в направлении по стрелке А), а двуплечие рычаги 13 поворачиваются по часовой стрелке и их концы, упирающиеся в копир 7, смещают его по цилиндрическим стержням 14,. осуществляя тем самым натяжение гибкой связи 5. При обратном ходе ползуна 2 привод 6 через двуплечие рычаги 13, поворачивающиеся против
часовой стрелки, ослабляет натяжение гибкой связи 5.
Предлагаемая конструкция устройства позволяет изменять натяжение 3 S
гибкой связи пропорционально . силе тяги привода , обеспечивая хорошее качество передачи движения .
(риё,2 10
| Передача с гибкой связью | 1980 |
|
SU996772A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
