Известные следящие системы синхронизации скорости электродвигателей содержат усилитель, на вход которого подается сигнал рассогласования, а на выход включен исполнительный двигатель, управляющий регулирующим органом.
Предлагаемая следящая система более соверщенна, так как она обеспечивает повышение точности синхронизации скорости путем получения сигнала ощибки в виде трех переменных напряжений, фазы которых сдвинуты на 120°, а частоты зависят от величины рассогласования скоростей.
Это достигается в результате того, что в качестве датчика рассогласования применены два трехфазных тахогенератора с обмотками AI, BI, Ci и соответственно /42, В и Cz, подключенными встречно по схеме Л), BI-GZ, Ci-BZ к трем выпрямителям. Последние питают цепи управления трех магнитных усилителей, к выходу которых подключен трехфазный исполнительный двигатель.
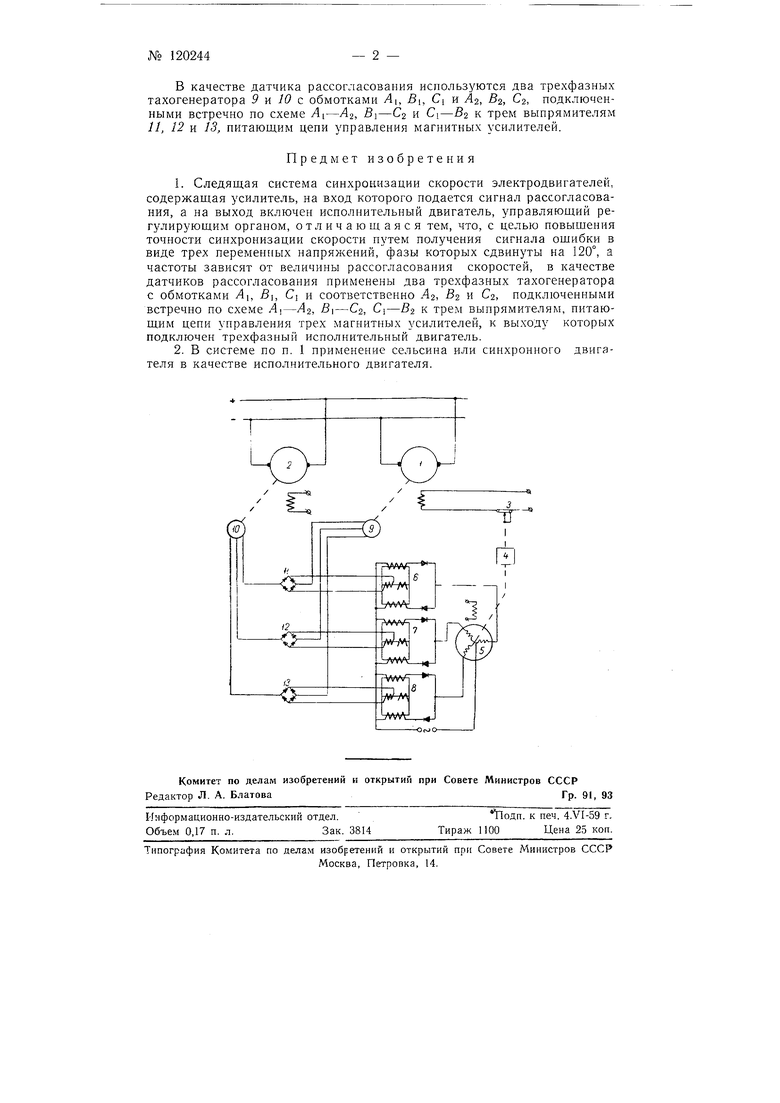
На чертеже изображена принципиальная электрическая схема предлагаемой системы.
Синхронизация скорости вращения двигателя / по отнощению к скорости двигателя 2 достигается посредством изменения магнитного потока двигателя при помощи реостата 5. Движок реостата 3 вращается через редуктор 4 с помощью двигателя 5, в качестве которого применяется сельсин или синхронный двигатель. Трехфазная обмотка двигателя 5 питается от магнитных усилителей 6, 7, 8, на вход которых подается сигнал рассогласования в виде трех переменных напряжений, фазы которых сдвинуты на 120°, а частоты зависят от величины рассогласования.
В качестве датчика рассогласования используются два трехфазных тахогенератора 9 и 10 с обмотками Л,, BI, Ci и Ла, 62, Сг, подключенными встречно по схеме AI-AZ, и Ci-BZ к трем выпрямителям 11, 12 и 13, питающим цепи управления магнитных усилителей.
Предмет изобретения
1.Следящая система синхронизации скорости электродвигателей, содержащая усилитель, на вход которого подается сигнал рассогласования, а на выход включен исполнительный двигатель, управляющий регулирующим органом, отличающаяся тем, что, с целью повыщения точности синхронизации скорости путем получения сигнала ошибки в виде трех переменных напряжений, фазы которых сдвинуты на 120°, а частоты зависят от величины рассогласования скоростей, в качестве датчиков рассогласования применены два трехфазных тахогенератора с обмотками Л, В, Cj и соответственно AZ, В и С, подключенными встречно по схеме Л|-Лз, BI-€2, Ci-BZ к трем выпрямителям, питающим цепи управления трех магнитных усилителей, к выходу которых подключен трехфазный исполнительный двигатель.
2.В системе по п. 1 применение сельсина или синхронного двигателя в качестве исполнительного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом постоянного тока | 1959 |
|
SU122516A1 |
| Силовой следящий электропривод для управления угловым положением объекта | 1962 |
|
SU152011A1 |
| Устройство для фазового управления | 1974 |
|
SU528679A1 |
| Сервопривод с двухфазным асинхронным двигателем | 1956 |
|
SU109921A1 |
| Устройство автоматической синхронизации движения створок ворот шлюза | 1986 |
|
SU1312136A1 |
| Следящий электропривод с двухфазным исполнительным двигателем | 1957 |
|
SU114017A2 |
| Бесконтактный реверсивный исполнительный механизм | 1957 |
|
SU115772A1 |
| Синхронно-следящая система | 1956 |
|
SU119566A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
