Изобретение относится к вспомогательному оборудованию кузнечно- прессового производства машиностроительных предприятий и может быть использовано для механизации подачи инструментов в рабочую зону кузнеч- но-прессовых машин.
Целью изобретения является повышение надежности инструментального манипулятора.
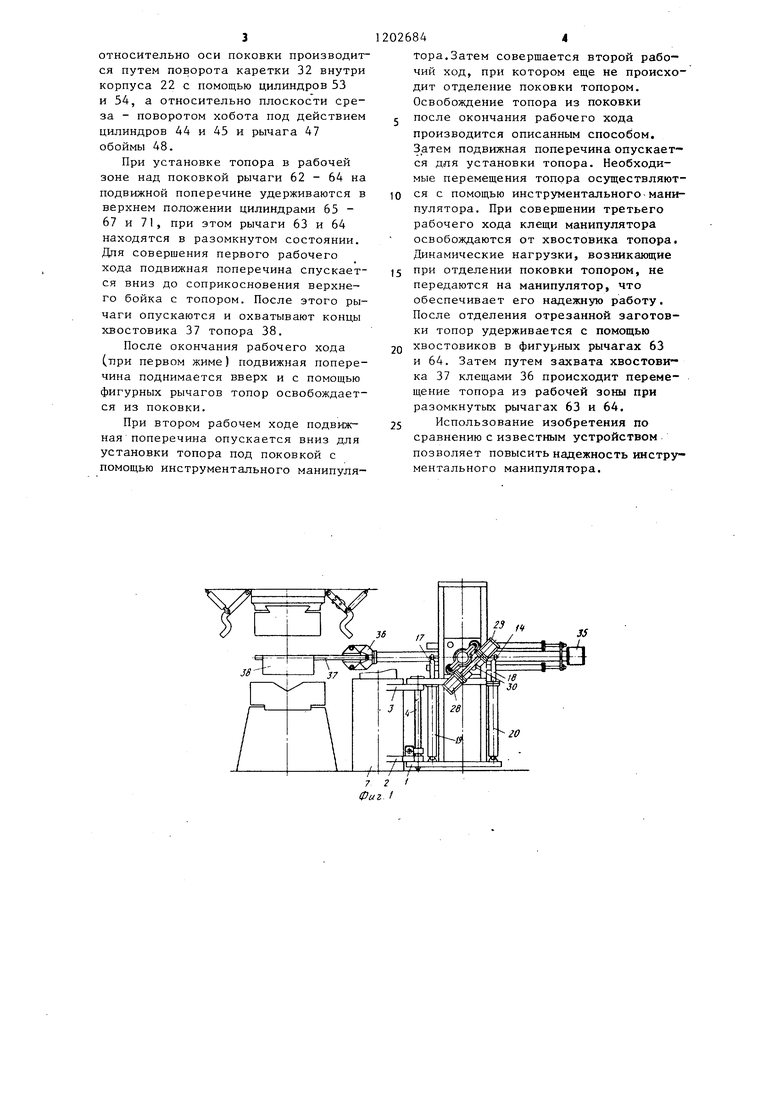
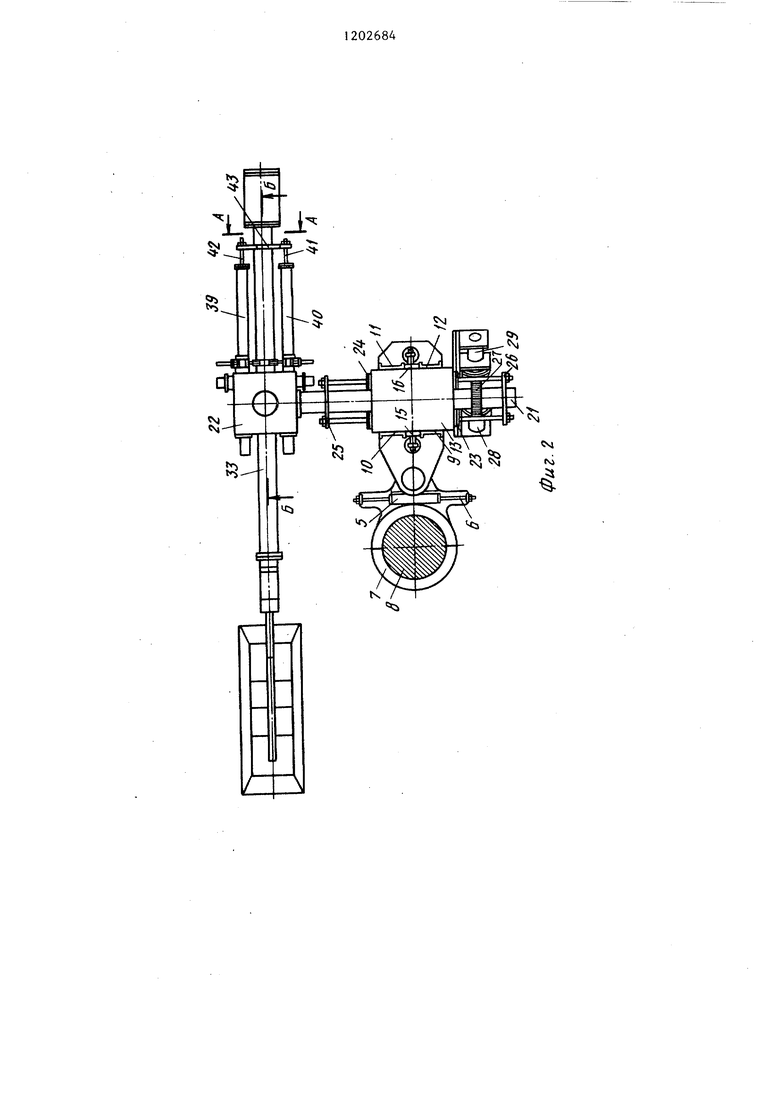
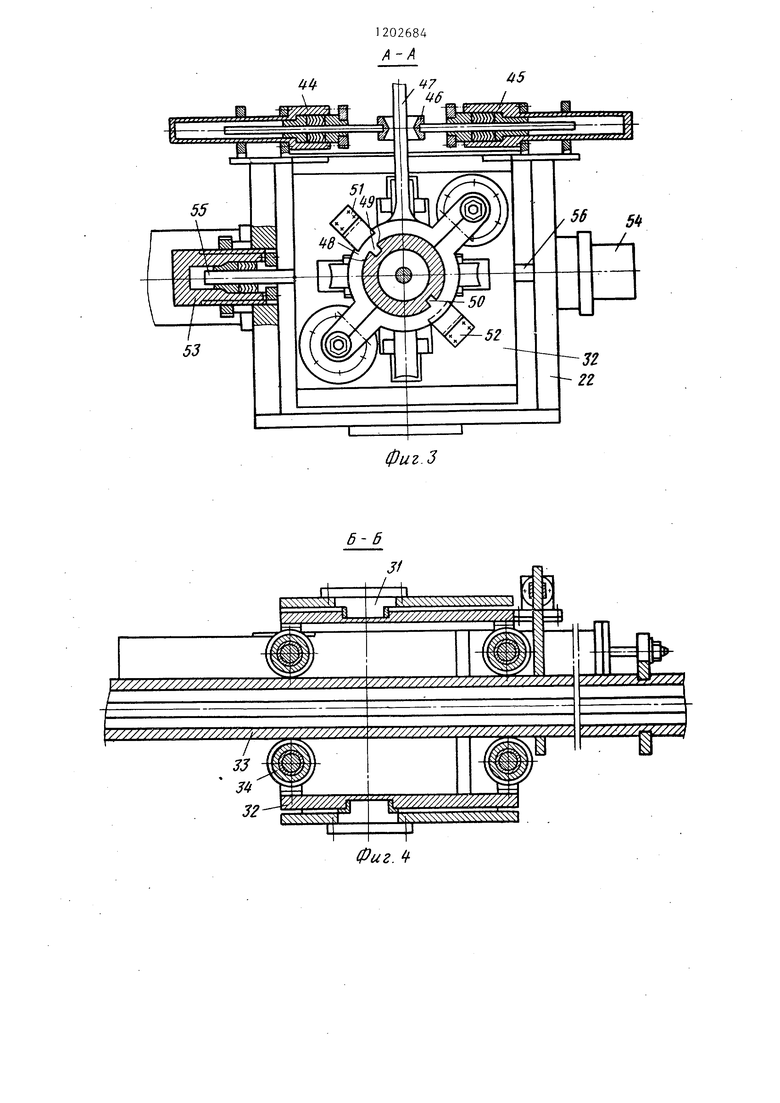
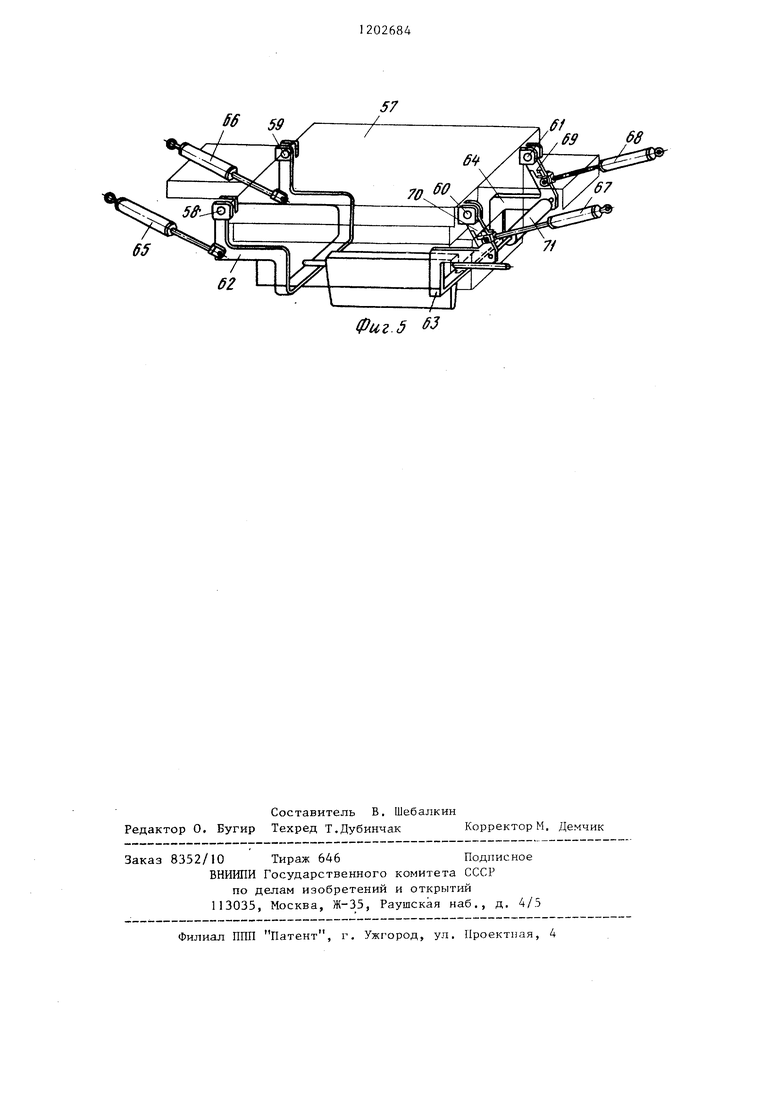
На фиг. 1 изображен инструментальный манипулятор,общий вид; на фиг, 2 - то же, вид сверху; на фиг. 3 - разрез А-Л на фиг. 2; на фиг. А - разрез Б-Б на фиг. 2; на фиг. 5 - механизм фиксадии и съема топора.
Инструментальный манипулятор содержит стойку 1э закрепленную шар- нирно на кронштейнах 2 и 3 при помощи оси 4, имеющей привод поворота, состоящий из цилиндра 5 с рейкой и штоком 6. Кронштейны 2 и 3 жестко связаны с ходоограничителем 7 на колонне 8 пресса. В стойке 1 между швеллерами 9-12 расположен ползун 13 со штырями 14, на которых закреплены направляющие ролики 15 и 16. Концы штырей связаны со штоками 17 и 18 цилиндров 19 и 20 подъема ползуна 13, внутри которо - го расположена штанга 21 с корпусом 22 на конце. Штанга 21 имеет возможность смещения относительно ползуна при помощи закрепленных в ползуне двух пар цилиндров 23 и 24 плунжерного типа, штоки которых связаны с обоймами 25 и 26, шарнир- но связанными со штангой 21 с помощью .кольцевого п-аза. На штанге 21 шарнирно закреплена шестерня 27 служащая для поворота штанги с помощью цилиндров 28 и 29, на штоках которых закреплена зубчатая рейка 30. Цилиндры 19 и 20 подъема ползуна 13 и цилиндры 23 и 24 смещения штанги 21 запитываются эмульсией высокого давления от магистрали пресса, В корпусе 22 с помощью цилиндров 31 закреплена поворотная каретка 32с отвестием, через которое проходят хобот 33 Чшструментального манипулятора, взаимодействующий с роликами 34, ;(акрепленными на торцовых сторонах каретки. На конце хобота имеется цилиндр 35 зажима клещей 36 для удерживания с помощью хвостовика 37 топора 38. Дпя перемещения хобота и топора служат пневматические ци026842
линдрь 39 и 40, проходящие через каретку 32 и жестко связанные с ней. Цилиндры 39 и 40 соединены с хоботом 33 при помощи UITOKOB 41 и 42 5 и разъемного кольца 43, входящего в кольцевой паз хобота. На каретке 32 закреплены цилиндры 44 и 45, Штоки которых с помощью шарнира 46 связаны с рычагом 47 обоймы 48. ПоШ следняя имеет выступы 49 и 50, входящие в продольные пазы на хоботе, что обеспечивает поворот хобота и топора на определенный угол, требуемый при отрубке поковок. Для
15 удержания обоймы 48 с рычагом 47 при продольном смещении хобота относи-.;, тельно каретки 32 служат захваты 51 и 52, жестко закрепленные на торцовой стороне каретки.
20 В корпусе 22 установлены цилиндры 53 и 54, служащие для поворота каретки 32 внутри корпуса при помощи штоков 55 и 56 при установке топора на определенный угол относитель25 но оси поковки в горизонтальной плоскости.
При нейтральном положении цилиндров топор устанавливается под углом 90 относительно оси поковки в гори3Q зонтальной плоскости.
На плите 57, прикрепленной к подвижной поперечине пресса посредством шарниров 58 - 61, установлены рычаги 62 - 64 с цилиндрами 65 - 68 их поворота,,корпусы которых шарнирно закреплены на плите 57. Рычаги с 1 илиндрами их поворота служат для удержания топора после окончания процесса рубки и для его выемки из поковки.
40 ,,ilT ;-/
Рычаги 63 и 64 имеют вторую пару шарниров 69 и 70 и цилиндр 71 их смыкания,, обеспечивающий разведение рычагов при подаче топора, удерживаемого при помощи хвостовика и клещевой головки. Цилиндр 71 имеет шарнирное соединение с рычагами 63 и 64.
Инструментальный манипулятор работает следующим образом.
Зажатый в клещах топор с помощью цилиндров 19 и 20 подъема поднимается вверх до верхнего уровня поковки. Затем с помощью цилиндров 39 и 40 перемещения хобот 33 с топором 38 перемещается в зону рубки. Установ- ка топора в месте рубки поковки производится в цилиндрах 23 и 24 путем перемещения штанги 21 в ползуне 13. Ловорот топора на угол
45
50
относительно оси поковки производится путем поворота каретки 32 внутри корпуса 22 с помощью цилиндров 53 и 54, а относительно плоскости среза - поворотом хобота под действием цилиндров 44 и 45 и рычага 47 обоймы 48.
При установке топора в рабочей зоне над поковкой рычаги 62 - 64 на подвижной поперечине удерживаются в верхнем положении цилиндрами 65 - 67 и 71, при этом рычаги 63 и 64 находятся в разомкнутом состоянии. Для совершения первого рабочего хода подвижная поперечина спускается вниз до соприкосновения верхнего бойка с топором. После этого рычаги опускаются и охватывают концы хвостовика 37 топора 38.
После окончания рабочего хода (при первом жиме) подвижная поперечина поднимается вверх и с помощью фигурных рычагов топор освобождается из поковки.
При втором рабочем ходе подвижная поперечина опускается вниз для установки топора под поковкой с помощью инструментального манипуЛя2026844
тора.Затем совершается второй рабочий ход, при котором еще не происходит отделение поковки топором. Освобождение топора из поковки
J после окончания рабочего хода производится описанным способом. Затем подвижная поперечина опускается для установки топора. Необходимые перемещения топора осуществляют10 ся с помощью инструментсшьного-манипулятора. При совершении третьего рабочего хода клещи манипулятора освобождаются от хвостовика топораf Динамические нагрузки, возникающие
15 при отделении поковки топором, не передаются на манипулятор, что обеспечивает его надежную работу. После отделения отрезанной заготовки топор удерживается с помощью
2Q хвостовиков в фигурных рычагах 63 и 64. Затем путем захвата хвостовика 37 клещами 36 происходит перемещение топора из рабочей зоны при разомкнутых рычагах 63 и 64.
25 Использование изобретения по сравнению с известным устройством позволяет повысить надежность инструментального манипулятора.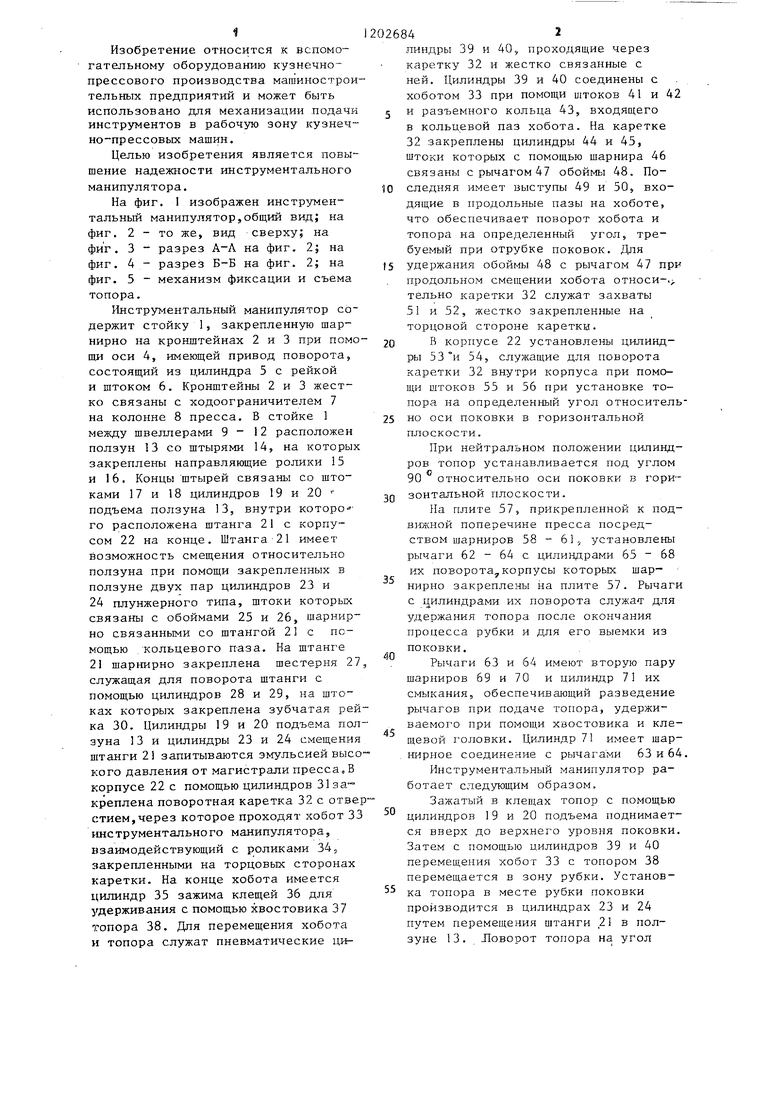
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи инструмента | 1973 |
|
SU447210A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| УСТРОЙСТВО ДЛЯ КОВКИ ПОКОВОК КОЛЕЦ | 1992 |
|
RU2009758C1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Клещевой захват ковочного манипулятора | 1982 |
|
SU1034826A1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| Ковочный комплекс | 1987 |
|
SU1532305A1 |
фиг.З
j
ХУххУчУччМ
У////////Ж ГГ,
31
I
ТТТ
/
-г ////////////////////7
У/ ////// /
t xxxff
Фиг.
S6 59
65
бг
68
Фиг. 5
