(54) ПЕРЕДНЯЯ ПОДВЕСКА ХОБОТА КОВОЧНОГО МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1982 |
|
SU1053949A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |
| Привод продольного перемещения хобота ковочного манипулятора | 1981 |
|
SU997945A1 |
| Манипулятор | 1979 |
|
SU812412A1 |
| Ковочный манипулятор | 1991 |
|
SU1766569A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Ковочный манипулятор | 1983 |
|
SU1082542A1 |
1
Изобретение относится к вспомогательному оборудованию кузнечно-прессовых цехов, а именно к конструкциямковочных манипуляторов.
Известна передняя подвеска хобота ковочного манипулятора, содержащая связанную тягой и рычагом с тележкой ковочного манипулятора гидравлическую пружину в виде силового цилиндра со штоком и поршнем, соединенного магистралью через дроссель и обратный клапан с аккумулятором минимального давления и через электромаг нитные золотники со.сливом и насосом, аккумулятор максимального давления с регулятором давления, а также систему управления, состоящую из электрически связанных между собдй задатчика положения хобота, управляющего устройства и установленного на штоке силового цилиндра основного потенциометра, ползушка которого жестко связана с корпусом указанного силового цилиндра 1.
При раооте манипулятора с известной передней подвеской после очередного хода пресса при ковке, давление в аккумуляторе минимального давления, соединенного с аккумулятором минимального давления, превышает необходимую для подъема- поковки с хоботом в исходное положение, величину, из-за инерционности поднимаемых масс что приведет к проскакиванию поковки с хоботом положения равновесия и к их колебаниям, увеличивающими длительность срабатывания передней подвески, что недопустимо при большом числе ходов пресса.
Цель изобретения - повышение производительности работы подвески.
Для достижения указанной цели передняя подвеска хобота ковочного манипулятора, содержащая связанную тягой и рычагом с тележкой ковочного манипулятора гидравлическую пружину в виде силового цили.ндра со штоком и поршнем, соединенного магистралью через дроссель и обратный клапан с аккумулятором минимального давления и через электромагнитные золотники со сливом и насосом, аккумулятор максимального давления с регулятором давления, систему управления с регулятором давления, а также систему управления, состоящую из электрически связанных между собой задатчика положения хобота, управляющего устройства и установленного на штоке силевого цилиндра основного потенциометра, ползушка которого жестко связана с корпусом указанного силового цилиндра, снабжена соединенным магистралью с регулятором давления силовым цилиндром подъема хобота, корпус которого жестко связан с тележкой манипулятора, а плунжер - с рычагом гидравлической пружины, при этом система управления снабжена электрически связанным с управляющим устройством и смонтированным на тележке манипулятора дополнительным потенциометром, ползушка которого установлена на плунжере силового цилиндра подъема хобота, и закрепленным на штоке силового цилиндра гидравличес- кой пружины и взаимодействующим с его корпусом реле, электрически связанным с электромагнитными золотниками.
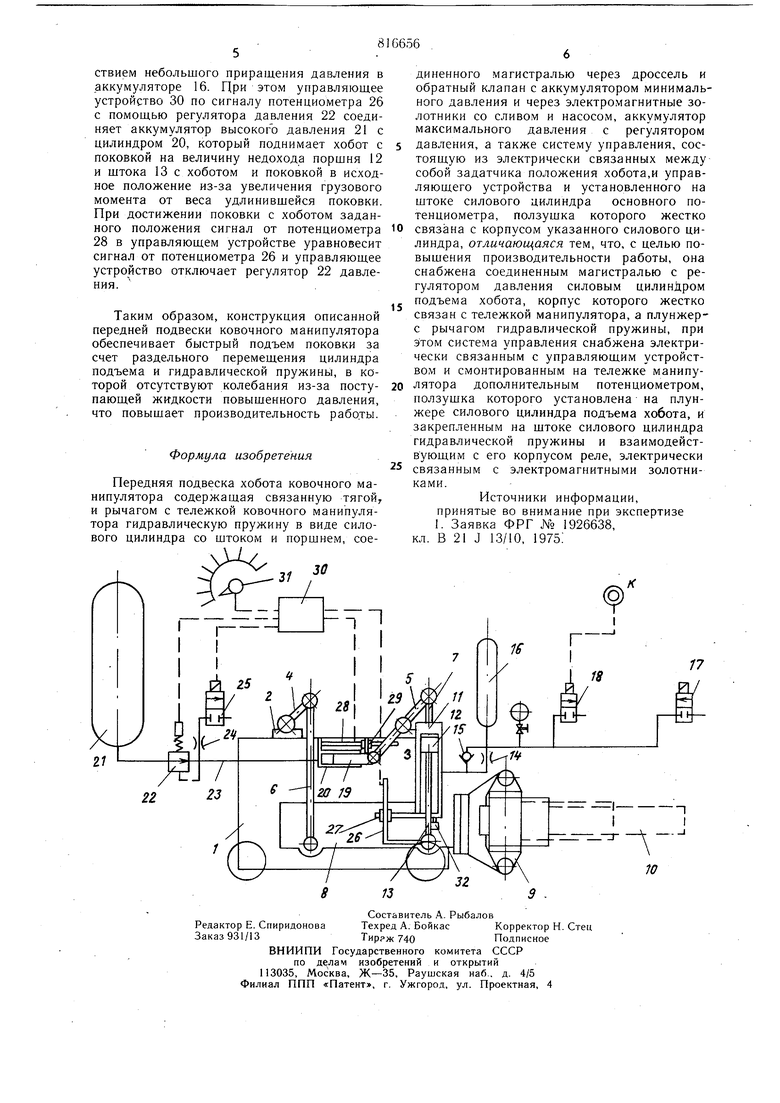
На чертеже схематично изображена конструкция передней подвески.
На тележке 1 с помощью поперечин. 2 и 3 установлены рычаги 4 и 5, шарнирно соединенные с тягами 6 и 7, удерживающими хобот 8 манипулятора с клещами 9, предназначенными для удержания поковки 10. Передняя тяГа 7 выполнена в виде гидравлической пружины, состоящей из цилиндра 11, порщня 12 и щтока 13. Цилиндр 11 связан через дроссель 14 и обратный клапан 15 с аккумулятором 16 минимального давления. Аккумулятор 16 наполняется насосом с помощью золотника 17 и соединяется со сливом через золотник 18. Конец рычага 5 связан с плунжером 19 цилиндра подъема 20, закрепленного на тележке. 1 и служащего -для подъема хобота 8 вместе с гидравлической пружиной. Цилиндр подъема 20 соединен с аккумулятором 21 максимального давления через регулятор 22 давления и трубопровод 23, и, через дроссель 24, с золотником 25. Регулятор давления предназначен для подачи жидкости высокого давления при подъеме в цилиндр 20, а золотник 25 для соединения полости цилиндра 20 со С.1ИВОМ при опускании передней подвески. Потенциометр 26, сигнал которого пропорцнонален величине недохода хобота с поковкой до начального положения из-за хиеличения грузового момента после обжат 1я и удлинения поковки, связан со штоком 13 , а его ползущка 27 соединена с цилиндром 11. Потенциометр 28 связан с цилиндром 20, а ползущка 29 - с плунжером 19. Потенциометр 28 показывает смещение плунжера 19 относительно цилиндра 20 п.ри подъеме подвески. Потенциометры 26 и 28 связаны с управляющим устройством 30, предназначенным для автоматического управления передней подвеской ковочного манипулятора. С управляющи.м устройством 30 соединены также регулятор 22 давления, золотник25 п задатчик 31 положения оси хобота относительно нижнего бойка пресса. Управляющее устройство 30 сблокировано с прессом и вырабатывает команды элементам передней подвески ковочного манипулятора только при условии падения давления в рабочем цилиндре пресса и при подъеме подвижной поперечины, т. е. при освобождении поковки бойками пресса. На щтоке 13 укреплено реле 32, взаимодействующее с цилиндром 11 гидравлической пружины и связанное с электромагнитами золотников 17 и 18. Реле 32 предназначено для управления электромагнитами золотников 17 и 18 при верхнем положении порщня 12 и щтока 13 относительно цилиндра 11.
Передняя подвеска ковочного манипулятора работает следующим образом.
При зажатии поковки 10 клещами 9 хобот 8 под действием грузового момента перемещается вниз, смещая порщень 12 гидравлической пружины относительно цилиндра 11. При этом, если порщень 12 находился в самом верхнем положении, то при смещении порщня со щтоком 13 вниз, срабатывает реле 32, которое замыкает нормально открытые контакты в цепи управления электромагнита золотника 17. Золотник 17 соединяет аккумулятор минимального давления с насосом высокого давления. Благодаря повыщению давления в аккумуляторе 16 порщень 12 со щтоком возвращается в верхнее положение и реле отключает контакты в цепи управления электромагнита золотника 17. Золотник 17 возвращается в исходное положение, отключая аккумулятор от насоса . Если при зажатии поковки 10 клещами 9 меньщего веса, чем ранее деформируемая, порщень 12 со щтоком 13 не смещаются вниз, то оператор нажимает кнопку К в цепи управления электромагнита золотника 18, который соединяет аккумулятор 16 со сливом. В результате уменьщения давления в аккумуляторе порщень 12 со щтоком 13 перемещаются вниз, при этом срабатывает реле 32, которое отключает контакты в цепи управления электромагнита золотника 18 и включает в цепи управления электромагнита золотник 17. Поршень со-штоком 13 возвращаются в верхнее положение, подготовив переднюю подвеску ковочного манипулятора для работы. После этого оператор размыкает цепи управления электромагнитами золотников 17 и 18. Задатчиком 31 устанавливается положение оси хобота относительно нижнего бойка пресса путем включения управляющим устройством 30 электромагнита золотника 25 и соединения полости цилиндра 20 со сливом. При опускании подвески до необходимой отметки сигнал от потенциометра 28 уравновесит сигнал в управляющем устройстве 30 от задатчика 31 и управляющее устройство отключит электромагнит золотника 25, который возвратится в исходное положение. После очередного деформирования поковки 10 бойками пресса, она вместе с хоботом 8, штоком 13 и поршнем 12 поднимается вверх под дей
