Изобретение относится к робототехнике и предназначено для использования в работах с большой степенью подвижности.
Целью изобретения является упро щение системы управления.
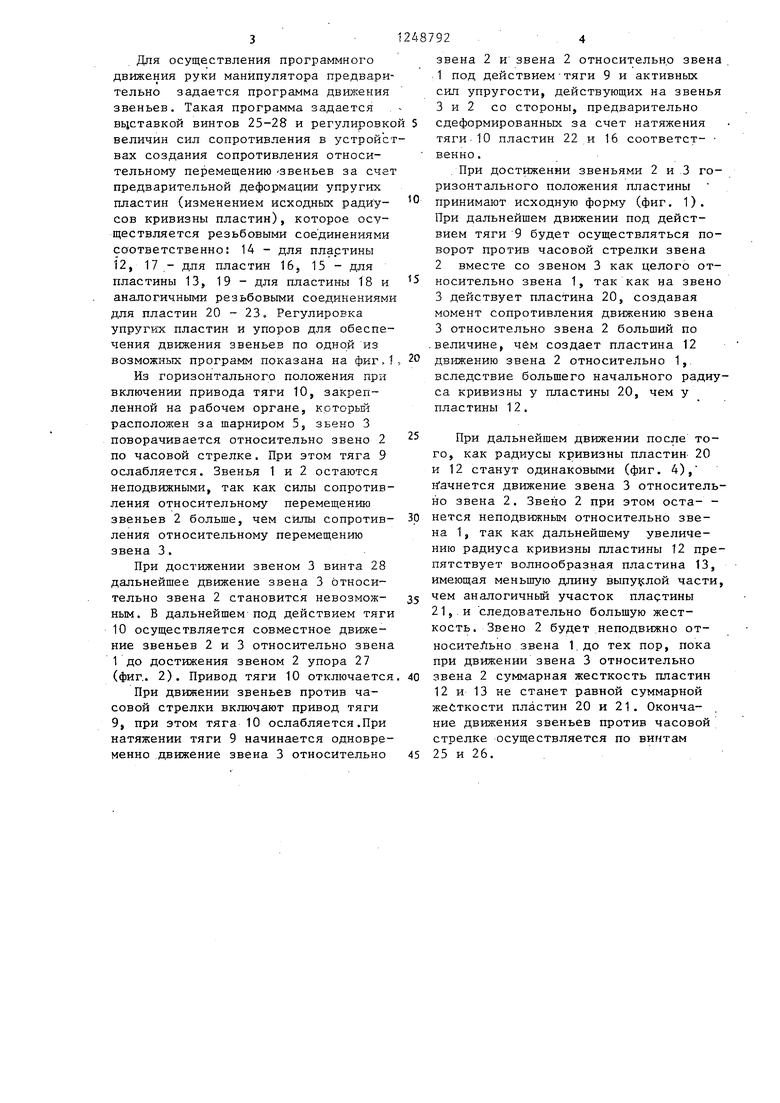
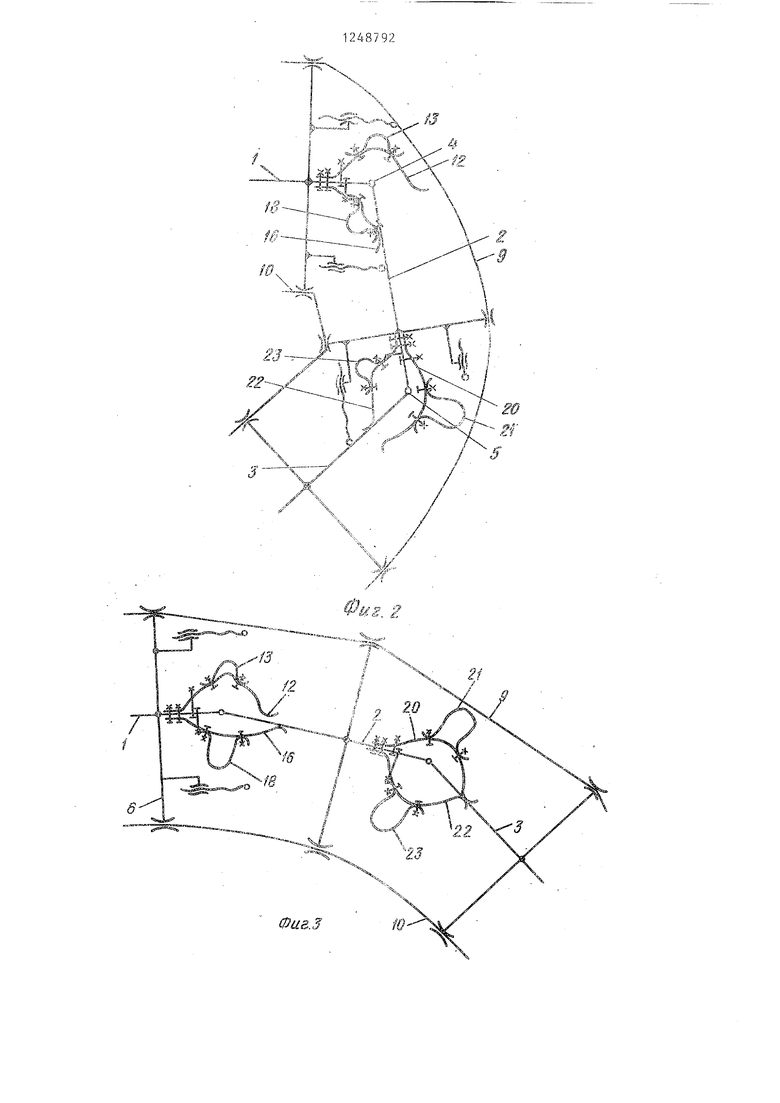
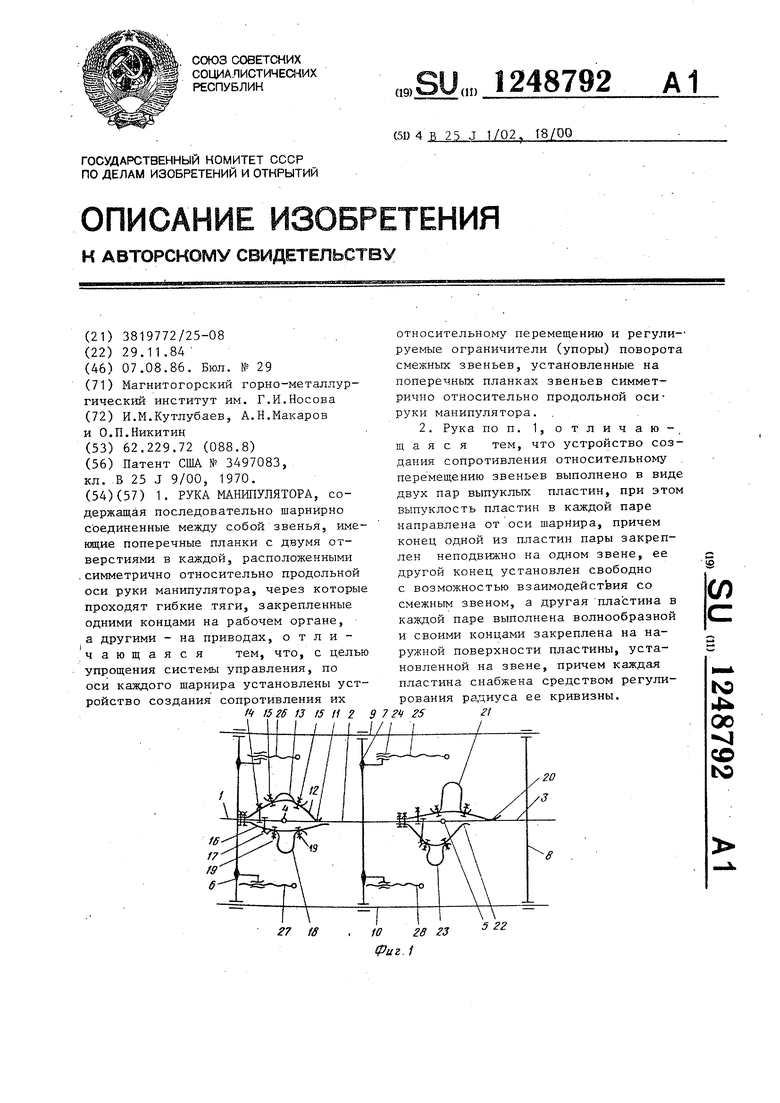
На фиг, 1 изображена кинематическая схема руки манипулятора, исходное положение; на фиг.2-4- промежуточные положения руки манипулятора.
Рука манипулятора содержит звенья 1-3 последовательно соединенные между собой шарнирами 4 и 5. Каждое звено имеет поперечную планку,, установленную перпендикулярно продольной оси-звена и неподвижно относительно него. Звено 1 содержит поперечную планку 6, звено.2 - поперечную планку 7, звено 3 - поперечную планку 8 В каждой поперечной планке выполнено по два отверстия, расположенные симметрично относительно продольной оси руки манипулятора, сквозь отверстия свободно проходят гибкие тяги 9 и 10.
Каждая пара соседних звеньев 11 связ ана между собой, кроме шарниров, устройствами создания сопротивления их относительному перемещению выполненного со средством регулирования радиуса кривизны, что обеспечивает регулирование сил сопротивления.
Устройство создания сопротивления относительному перемещению звеньев
11со средством регулирования выполнены в виде пар выпуклых пластин. Одна из пар образована пластинами
12и 13. Пластина 12 одним концом закреплена неподвижно на звене 1, Другой конец пластины 12 контактирует со звеном 2 и установлен с возможностью относительного движения вдоль него. Выпуклость пластины 12 направлена от оси шарнира 4. Б пластине 12 выполнен продольньй паз, в который введен болт резьбового соединения 14, обеспечивающий регулировку радиуса ее кривизны. Головка болта установлена неподвижно относительно звена 1. В пластине 12 симметрично относительно середины выполнены два отверстия, оси которых пересекают продольную ось пластины.
В эти отверстия введены болты резьбового соединения 15. Посредством этих соединений к наружной поверхности пластины 12 неподвижно при
5
0
5
0
5
0
5
креплена упругая волнообразная пластина 13, в которой выполнены продоль ные пазы под болты, резьбовых соединений 15. Резьбовые соединения с пазами -служат для регулирования радиуса кривизны части пластины 13, заключенной между точками контакта этой пары пластин. Продольные оси пластин 13, 12 и звеньев 1 и 2 лежат в одной плоскости, причем эт.а плоскость перпендикулярна оси вращения шарнира 4.
Со стороны, противоположной расположению пластин 12 и 13 относитель- Hj3 звеньев 1 и 2, выполнено аналогичное описанному устройство создания сопротивления относительному перемещению звеньев 11, а именно звена 2 относительно звена 1 по ча- совой стрелке. Резьбовое соединение соединяет непо движно упругую пластину 16 и звено 1. Резьбовое соедине-- ние 17 служит для изменения радиуса кривизны пластины 16 при настройке манипулятора. Пластина 18 соединена с пластиной 16 через резьбовые соединения 19.
Все шарниры руки манипулятора оснащены аналогичными устройствами.
Устройство создания сопротивления относительному перемещению звена 3 относительно звена 2 содержит пары пластин 20-23.
Каждое звено имеет регулируемые :ограничители поворота смежных звеньев при относительном движении звеньев по часовой и против часовой стрелки соответственно. Каждый регулируе- мьй ограничитель поворота выполнен с возможностью его регулирования при настройке руки манипулятора и устроен следующим образом. Регулируемый ограничитель угла поворота звена 3 относительно звена 2 при движении против часовой стрелки содержит гайку 24 винтовой передачи, жестко соединенную с поперечной планкой 7. Винт 25 винтовой передачи выполнен самотормозящимся и является упором звена 3 при его повороте, относительно звена 2.
Выпуклые пластины 12, 16, 20 и 22 в исходном состоянии идентичны.
Регулирование величины поворота звена 2 относительно звена 1 производится винтами 26 и 27, звена 3 относительно звена 2 винтами 25 и 28.
Рука манипулятора работает следующим образом.
Для осуществления программного движения руки манипулятора предварительно задается программа движения звеньев. Такая программа задается вь1ставкой винтов 25-28 и регулировко величин сил сопротивления в устройствах создания сопротивления относительному перемещению -звеньев за счет предварительной деформации упругих пластин (изменением исходных радиусов кривизны пластин), которое осуществляется резьбовыми соединениями соответственно: 14 - для пластины 12, 17 - для пластин 16, 15 - для пластины 13, 19 - для пластины 18 и аналогичными резьбовыми соединениями для пластин 20-23. Регулировка упругих пластин и упоров для обеспечения движения звеньев по одной из возможных программ показана на фиг,
Из горизонтального положения при включении привода тяги 10, закрепленной на рабочем органе, который расположен за шарниром 5, звено 3 поворачивается относительно звено 2 по часовой стрелке. При этом тяга 9 ослабляется. Звенья 1 и 2 остаются неподвижными, так как силы сопротивления относительному перемещению звеньев 2 больше, чем силы сопротив- ления относительному перемещению звена 3.
При достижении звеном 3 винта 28 дальнейшее движение звена 3 относительно звена 2 становится невозмож- ным. В дальнейшем под действием тяги 10 осуществляется совместное движение звеньев 2 и 3 относительно звена 1 до достижения звеном 2 упора 27 (фиг.. 2). Привод тяги 10 отключается
При движении звеньев против часовой стрелки включают привод тяги 9, при этом тяга 10 ослабляется.При натяжении тяги 9 начинается одновременно движение звена 3 относительно
10
15
20
5 30
248792 .4
звена 2 и звена 2 относительно звена 1 под действиемтяги 9 и активных сил упругости, действующих на звенья 3 и 2 со стороны, предварительно сдеформированных за счет натяжения тяги - 10 пластин 22 и 16 соответст- венно.
При достижении звеньями 2 и 3 горизонтального положения пластины принимают исходную форму (фиг. 1). При дальнейшем движении под действием тяги 9 будет осуществляться поворот против часовой стрелки звена
2вместе со звеном 3 как целого относительно звена 1, так как на звено
3действует пластина 20, создавая момент сопротивления движению звена 3 относительно звена 2 больший по величине, чем создает пластина 12 движению звена 2 относительно 1, вследствие большего начального радиуса кривизны у пластины 20, чем у пластины 12.
При дальнейшем движении после того, как радиусы кривизны пластин 20 и 12 станут одинаковыми (фиг. 4), н ачнется движение звена 3 относительно звена 2. Звено 2 при этом оста- - нется неподвижным относительно звена 1, так как дальнейшему увеличению радиуса кривизны пластины 12 препятствует волнообразная пластина 13, имеющая меньшую длину выпуклой части чем аналогичньш участок пластины 21, и следовательно большую жесткость. Звено 2 будет неподвижно относительно звена 1.ДО тех пор, пока при движении звена 3 относительно звена 2 суммарная жесткость пластин 12 и 13 не станет равной суммарной жесткости пластин 20 и 21. Окончание движения звеньев против часовой стрелке осуществляется по виг1там 25 и 26.
«,..
Фи&.З
-ю
Фиг4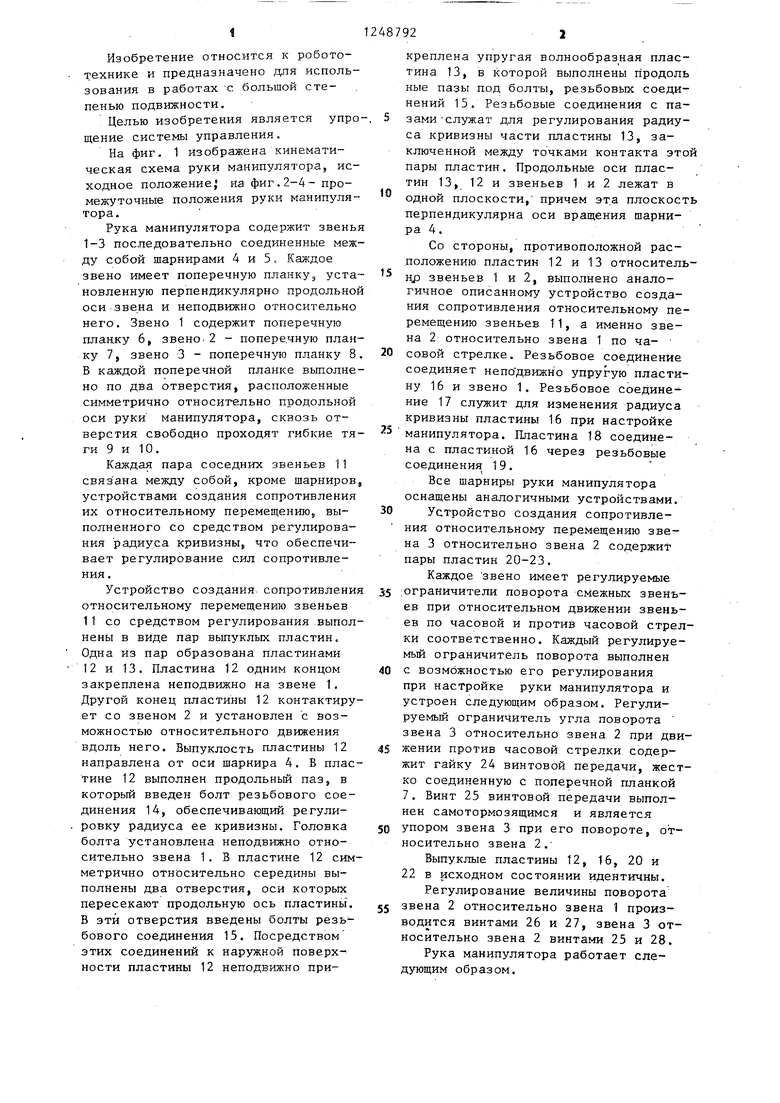
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1263520A1 |
| Рука манипулятора | 1985 |
|
SU1321576A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНОТЕРАПИИ ПОЗВОНОЧНИКА | 1994 |
|
RU2071750C1 |
| Рука манипулятора | 1986 |
|
SU1333564A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Рука манипулятора | 1985 |
|
SU1291382A1 |
| Исполнительный орган манипулятора | 1986 |
|
SU1323364A1 |
| Планетарный механизм с гибкой связью | 1980 |
|
SU937843A1 |
| УСТРОЙСТВО ПРИОТКРЫВАНИЯ КРЫШКИ ВХОДНОГО ЛЮКА | 2007 |
|
RU2340509C1 |
| Рука тензорного манипулятора | 1984 |
|
SU1202851A1 |
| Патент США № 3497083, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
