1
Изобретение относится к машино строению и может быть использовано при создании .средств автоматизации технологических процессов, включающих сварочные, окрасочные и подъемно транспортные операции.
Цель изобретения - расширение тек нологических в озможностей исполнительного органа манипулятора путем повышения точности позиционирования конечного звена.
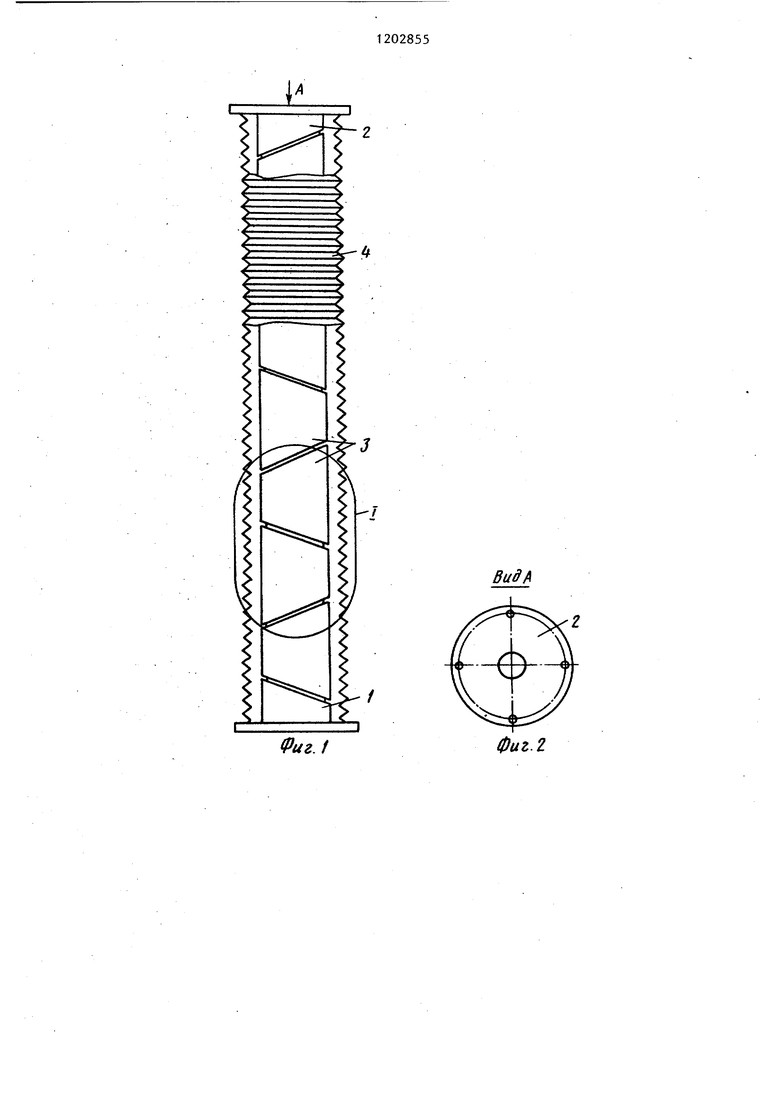
На фиг. 1 показан исполнительный орган манипулятора, общий вид) на фиг. 2 - вид А на фиг.--1; на фиг.З - узел I на фиг. 1.
Исполнительньй орган манипулятора содержит начальное 1 и конечное 2 звенья (фиг.1), между которыми размещены промежуточные звенья 3, : выполненные в виде полых корпусов со скошенными торцами. Исполнительный орган манипулятора защищен от воздействия внешней среды кожухом 4.
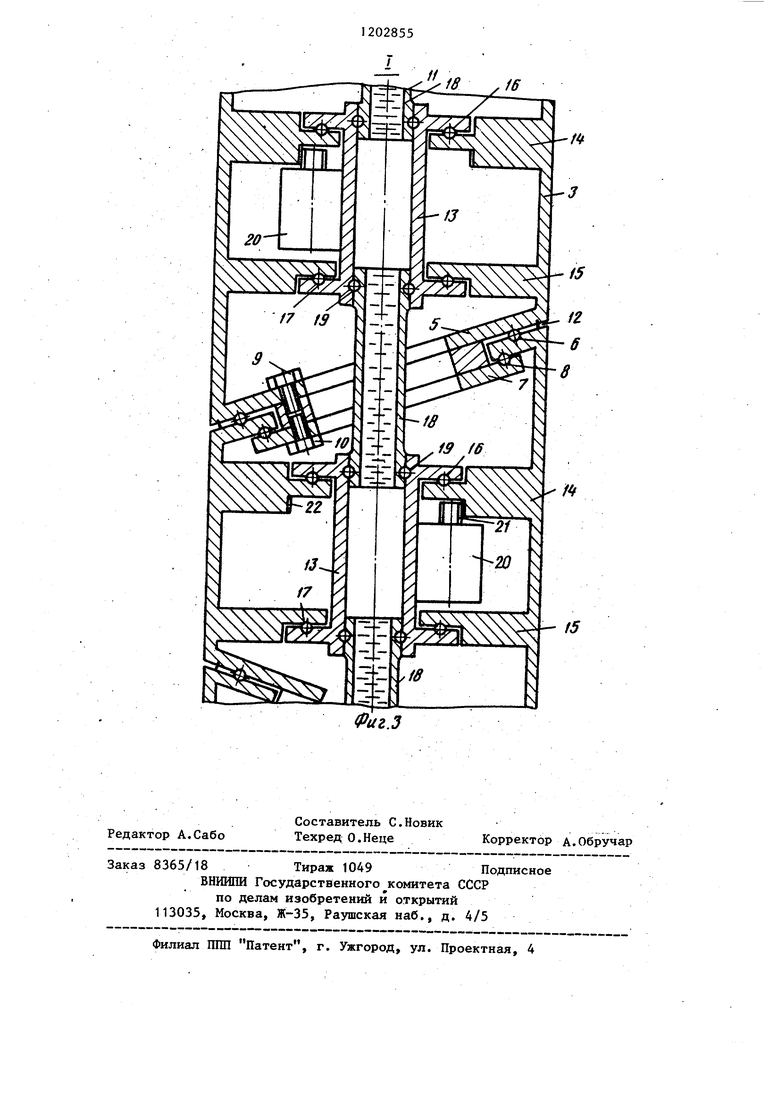
Каждое звено 3 (фиг.З) имеет фланец 5 с канавкой под шарики 6 и фланец 7 с канавкой под шарики 8, стянутые с помощью болтов 9 и 10. внутри звеньев расположен гибкий вал 11. Зазор между смежными звеньями уплотняется кольцом 12. Втулка 13 крепится на круговых, опорах 14 и 15. Шарики 16 и 17 используются для уменьшения трения качения. Втулки 13 связаны между собой полыми торсйо нами 18. Соединения торсионов с втулками фиксируются шариками 19,
2028552
расположенными в сферических лунках. Втулка 13 начального звена 1 жестко крепится к основанию (не .показано). Двигатели 20 установлены на втулках 5 13 гибкого вала 11.
На выходных валах двигателя 20 смонтированы зубчатые колеса 21, которые зацеплены с внутренними зубчатыми колесами с внутренним зацепле- tO нием 22. Для исключения скручивания провода управления подводятся к дви - гателям по внутреннему каналу гибкого вала 11 (не показано).
Исполнительный орган манипулято- 15 ра работает следующим образом.
При включении двигателя 20 зубчатое колесо 21 поворачивает зубчатое колесо с внутренними зацеплениями 22 и, следовательно, звено 3 20 относительно вала 11, который в силу высокой крутильной жесткости гибких элементов остается неподвижен. Трубчатые торсионы 18 при вращении звена 3 изгибаются. Конечное звено 25 2 при вращении любого из промежуточных звеньев 3 описывает в пространстве коническую поверхность. Совместное движение нескольких промежуточных звеньев определяет заданное по- 30 ложение конечного звена 2 в пространство.
Однотипность конструкции и формы промежуточных звеньев 3 позволяет использовать их как модули для наращивания числа звеньев исполнитель35
ного органа манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1979 |
|
SU874331A2 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Исполнительный орган манипулятора | 1990 |
|
SU1771954A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Промышленный робот | 1980 |
|
SU931463A1 |
| Привод подвижного звена | 1989 |
|
SU1764984A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1123227A1 |
| Манипулятор | 1983 |
|
SU1199610A1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
ВидК
Фиг./
фиг.2.
/«
Редактор А.Сабо
Составитель С.Новик Техред О.Неце
8365/18 Тираж 1049Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Филиал ШШ Патент, г. Ужгород, ул. Проектная, 4
Фиг.З
Корректор А.Обручар
| Исполнительный орган манипулятора | 1979 |
|
SU874331A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
