(54) ПРОМЫШЛЕННЫЙ РОБОТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм уравновешивания промышленного робота | 1987 |
|
SU1445947A1 |
| Промышленный робот | 1987 |
|
SU1407792A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU560746A2 |
| Промышленный робот | 1987 |
|
SU1444141A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Механизм позиционирования исполнительного органа | 1983 |
|
SU1114548A2 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
| Промышленный робот | 1979 |
|
SU848349A1 |
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
1
Изобретение относится к станкостроению, в частности к робототехническим устройствам.
Известен промышленный робот, содержащий основание, исполнительный орган из шарнирно связанных звеньев, механизм уравновешивания, приводы и систему управления 1.
Недостатком известного робота является невозможность уравновешивания исполнительного органа во всем диапазоне его перемеш,ений, что снижает точность позиционирования и скорость перемеш.ения исполнительного органа промышленного робота и производительность робота в целом.
Цель изобретения - повышение производительности и точности позиционирования исполнительного органа.
Указанная цель достигается тем, что механизм уравновешивания робота выполнен в виде копира, расположенного на уравновешиваемом звене исполнительного органа, торсионного вала, жестко связанного со смежным звеном, и втулки, кинематически связанной с уравновешиваемым звеном, причем торсионный вал расположен в этой втулке и связан с ней посредством шлицевого соединения.
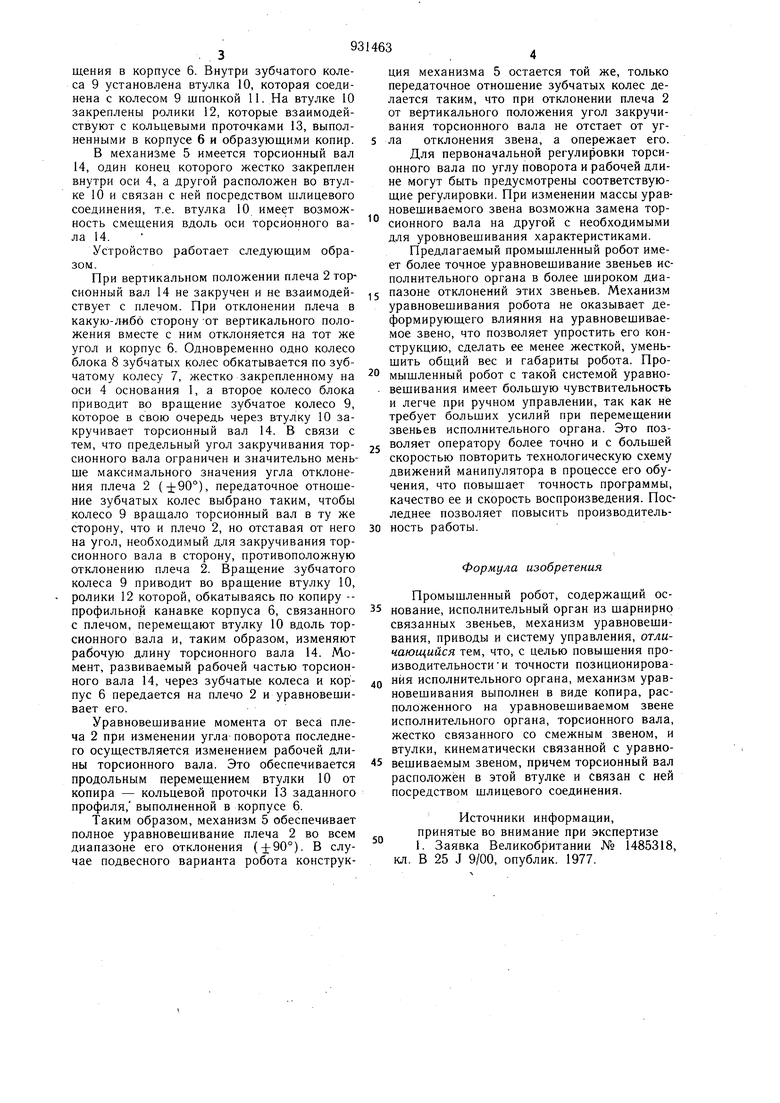
На фиг. 1 схематически изображен робот, общий вид, напольный вариант; на фиг. 2 - то же, подвесной вариант; на
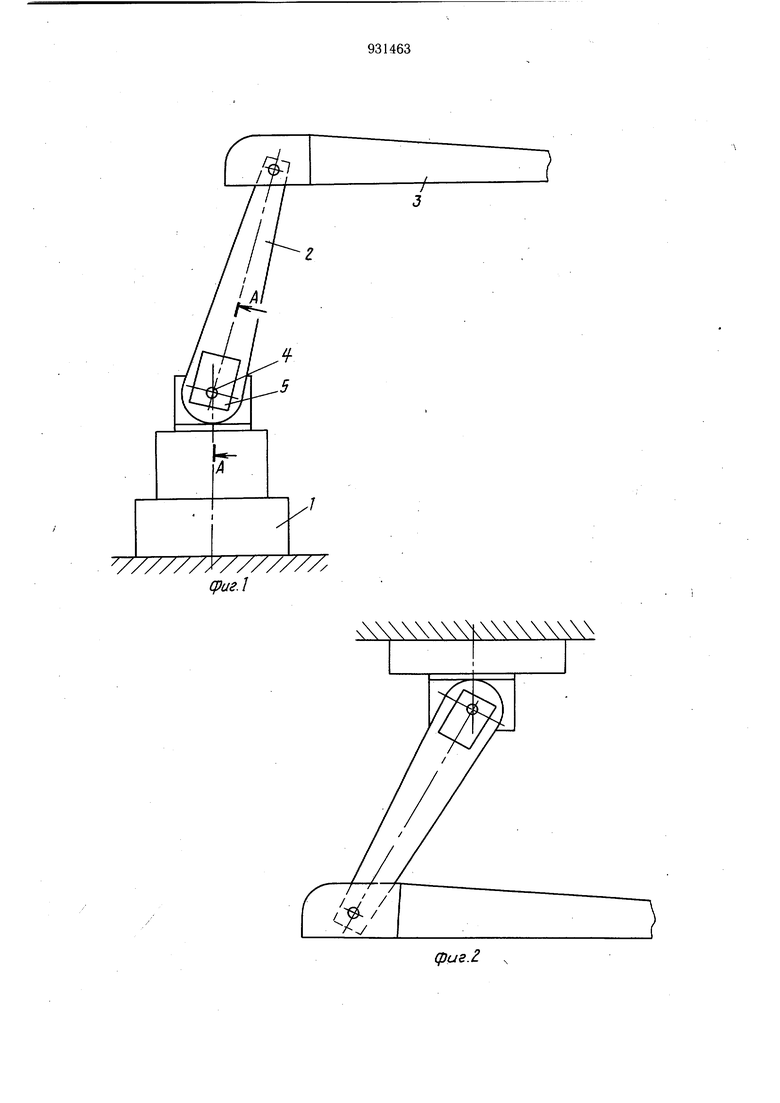
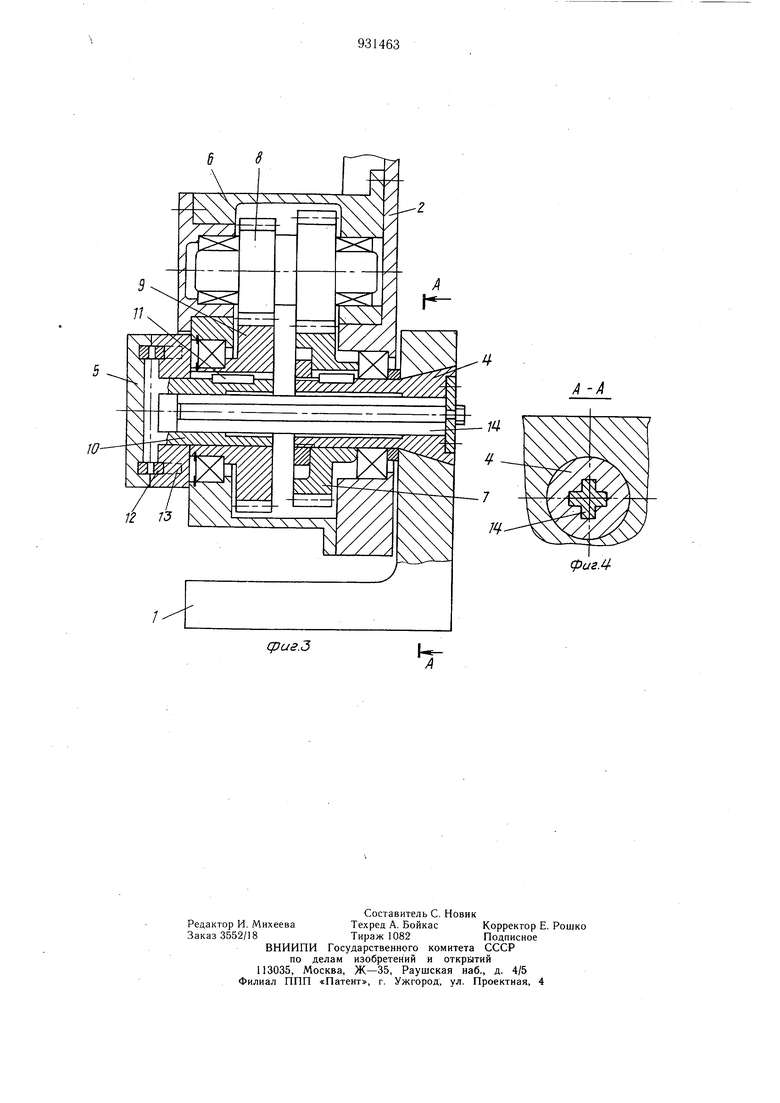
5 фиг. 3 - механизм уравновешивания; на фиг. 4 - разрез А-А на фиг. 3.
Промышленный робот имеет основание 1, на котором смонтирован исполнительный орган - манипулятор, состоящий из шарнир,0 но соединенных звеньев - плеча 2 и предплечья 3. Плечо 2 (последующее звено) соединено шарнирно с осью 4, жестко закрепленной на основании 1 (предыдущем звене). В основании 1 смонтирована гидроаппаратура для управления роботом (не показана).
Механизм 5 уравновешивания расположен в корпусе 6 (фиг. 3), жестко закрепленном на плече 2. Внутри корпуса на оси 4 жестко закреплено неподвижное зубчатое колесо 7. В корпусе 6 смонтирован с возможностью вращения блок 8 зубчатых колес. Одно зубчатое колесо блока 8 взаимодействует с неподвижным зубчатым колесом 7, а второе - с зубчатым колесом 9, которое также смонтировано с возможностью вращения в корпусе 6. Внутри зубчатого колеса 9 установлена втулка 10, которая соединена с колесом 9 шпонкой 11. На втулке 10 закреплены ролики 12, которые взаимодействуют с кольцевыми проточками 13, выполненными в корпусе б и образующими копир.
В механизме 5 имеется торсионный вал 14, один конец которого жестко закреплен внутри оси 4, а другой расположен во втулке 10 и связан с ней посредством шлицевого соединения, т.е. втулка 10 имеет возможность смещения вдоль оси торсионного вала 14.
Устройство работает следующим образом.
При вертикальном положении плеча 2 торсионный вал 14 не закручен и не взаимодействует с плечом. При отклонении плеча в какую-либо сторону от вертикального положения вместе с ним отклоняется на тот же угол и корпус 6. Одновременно одно колесо блока 8 зубчатых колес обкатывается по зубчатому колесу 7, жестко закрепленному на оси 4 основания 1, а второе колесо блока приводит во вращение зубчатое колесо 9, которое в свою очередь через втулку 10 закручивает торсионный вал 14. В связи с тем, что предельный угол закручивания торсионного вала ограничен и значительно меньще максимального значения угла отклонения плеча 2 (90°), передаточное отнощение зубчатых колес выбрано таким, чтобы колесо 9 вращало торсионный вал в ту же сторону, что и плечо 2, но отставая от него на угол, необходимый для закручивания торсионного вала в сторону, противоположную отклонению плеча 2. Вращение зубчатого колеса 9 приводит во вращение втулку 10, ролики 12 которой, обкатываясь по копиру -профильной канавке корпуса 6, связанного с плечом, перемещают втулку 10 вдоль торсионного вала и, таким образом, изменяют рабочую длину торсионного вала 14. Момент, развиваемый рабочей частью торсионного вала 14, через зубчатые колеса и корпус 6 передается на плечо 2 и уравновещивает его.
Уравновешивание момента от веса плеча 2 при изменении угла поворота последнего осуществляется изменением рабочей длины торсионного вала. Это обеспечивается продольным перемещением втулки 10 от копира - кольцевой проточки 13 заданного профиля, выполненной в корпусе 6.
Таким образом, механизм 5 обеспечивает полное уравновещивание плеча 2 во всем диапазоне его отклонения (+90°). В случае подвесного варианта робота конструкция механизма 5 остается той же, только передаточное отнощение зубчатых колес делается таким, что при отклонении плеча 2 от вертикального положения угол закручивания торсионного вала не отстает от угла отклонения звена, а опережает его. Для первоначальной регулировки торсионного вала по углу поворота и рабочей длине могут быть предусмотрены соответствующие регулировки. При изменении массы уравновещиваемого звена возможна замена торсионного вала на другой с необходимыми для уровновещивания характеристиками.
Предлагаемый промышленный робот имеет более точное уравновешивание звеньев исполнительного органа в более широком диапазоне отклонений этих звеньев. Механизм уравновешивания робота не оказывает деформирующего влияния на уравновешиваемое звено, что позволяет упростить его конструкцию, сделать ее менее жесткой, уменьшить общий вес и габариты робота. Промыщленный робот с такой системой уравно. вешивания имеет большую чувствительность
и легче при ручном управлении, так как не
требует больших усилий при перемещении
звеньев исполнительного органа. Это позволяет оператору более точно и с большей скоростью повторить технологическую схему движений манипулятора в процессе его обучения, что повышает точность программы, качество ее и скорость воспроизведения. Последнее позволяет повысить производитель0 ность работы.
Формула изобретения
Промышленный робот, содержащий основание, исполнительный орган из шарнирно связанных звеньев, механизм уравновешивания, приводы и систему управления, отличающийся тем, что, с целью повышения производительности и точности позиционирования исполнительного органа, механизм уравновешивания выполнен в виде копира, расположенного на уравновешиваемом звене исполнительного органа, торсионного вала, жестко связанного со смежным звеном, и втулки, кинематически связанной с уравновешиваемым звеном, причем торсионный вал расположён в этой втулке и связан с ней посредством шлицевого соединения.
Источники информации, принятые во внимание при экспертизе 1. Заявка Великобритании № 1485318, кл. В 25 J 9/00, опублик. 1977.
ч
фиг. 2 6
дуаг.З
т S
