третьего регистра, информационные входы которого соединены с соответствующими адресными выходами контролируемого микропрограммного блока управления, информационные выходы третьего регистра подключены к шине индикации ацреса., входы обнуления второго и третьего триггеров соединены с входом синхронизации устройства, прямой выход второго триггера соединен с выходом нормаль ной работы устройства, инверсный
Изобретение относится к автоматике и вычислительной технике и может быть использовано для реализации средств контроля управляющих автоматов, применяемых в цифровых вы- числитехпзных машинах и различных устройствах цифровой автоматики.
Цель изобретения - повышение достоверности контроля.
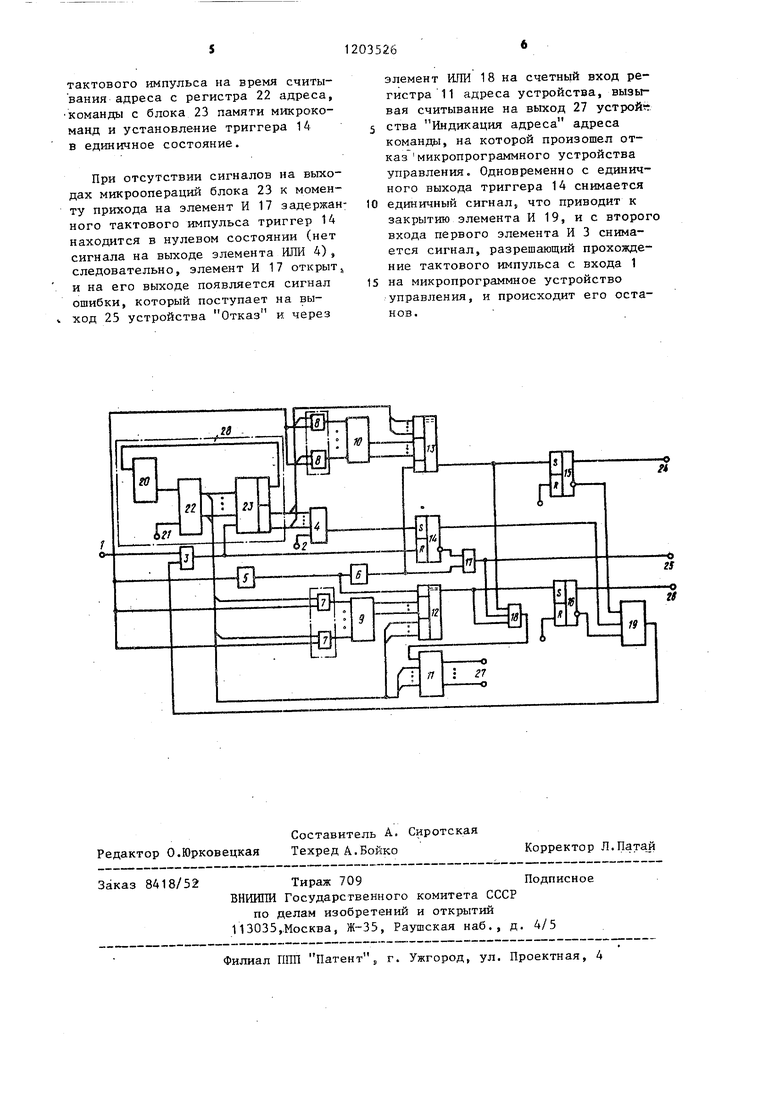
На чертеже приведена функциейаль ная схема предлагаемого устройства,
В состав устройства входят синхронизирующий вход 1э вход 2 начальной установки, элемент И 3, эхгемент ИЛИ , элементы 5 и 6 задержки, i-py пы элементов И 7 и 8, регистры 9 и 10, регистр 11 адреса устройства .схемы 12 и 13 сравнения, триггеры
14 - 1б, элемент И 17 „ элемент ИЛИ 18, элемент И 19, депшфратор 20 вход 21 установки начального адреса регистр 22 адреса микропрограммного автомата, блок 23 памяти микрокоманд, выходы 24-26 правильной работы, отказа и зацикливания соответ- ственно и выход 27 индикации адреса (цепи синхронизации работы буферных регистров 9 и 10 и регистра 11 адреса не показаны), блок микропрограмм.
Устройство 28 управления позволяет контролировать ошибки программирования и перфорации типа тупик, приводящие к зацикливанию программы на каком-либо адресе,, и ошибочного занесения в блок памяти микропрограмм в соседние ячейки одинаковых команд. Такие ошибки обнаруживаются
0352.t
выход второго триггера соединен с первым входом третьего элемента И, второй вход которого соединен с пря- мьп выходом первого триггера, вход установки третьего триггера соединен, с выходом первой схемы сравнения, прямой выход третьего триггера соединен с выходом зацикливания устройства, инверсный выход третьего триггера соединен с третьим входом третьего элемента И,- выход которого соединен с вторым входом первого элементаИ,
при сравнении адресных частей предыдущей и последующей микрокоманд и сравнении кодов команд. В устройстве предусмотрены также индикация адреса, на котором произошло заклинивание s сравнение кодов соседних команд и контроль физического отказ элементов на выходе микроопераций блока памяти.
Устройство работает следующим образом.
Перед, началом работы схема приводится в исходное состояние путем подачи на входы 2 начальной установки единичного импульса, и триггеры 15 и 16 устанавливаются в нулевое состояние,, а триггер 14 - в единичное. В результате этого с выхода элемента И 19 единичный сигнал подается на вход элемента И 3 и разрешает прохождение тактового импульса с входа 1 на выход элемента И 3. Поддча импульса на вход 2 производися также после останова микропрограммного устройства по сигналам ошибки для возобновления работы устройства контроля,
Ход программы в устройстве контролируется следующим образом. Очередной тактовьш импульс поступает через синхронизирующий вход 1 устройства на входы элементов И 7 и 8. первой и второй групп и разрешает запись адреса микрокоманды с выхода регистра 22 адреса блока микропрограммного управления на регистр 9 и запись кода команды с выхода микроопераций блока 23 памяти микроко5
манд на регистр 10, Этот же импульс поступивший через элемент И 3 на блок 23 памяти микрокоманд, вызывает считывание очередной микрокоманды. Затем на регистре 22 с помощью дешифратора 20 устанавливается адрес очередной микрокоманды, и тактовый импульс, вызвавший считывание микрокоманды через элемент. 5 задержки, поступает на схему 12 сравне- ния и через элемент 6 задержки на схему 13 сравнения (для разрешения сравнения). Происходит сравнение адреса предыдущей микрокоманды, записанного на регистре 9, и адреса очередной микрокоманды, поступающег на схему 12 сравнения с выхода регистра 22 адреса (в период между тактовыми импульсами, когда отсутствуют разрешение записи на регист- ры 9 и 10 через элементы 7 и 8). Одновременно адрес очередной микрокоманды заносится в регистр 11 адреса устройства. .При равенстве укзанных адресов схема 12 сравнения формирует сигнал ошибки, который поступает на единичный вход триггера 16 и на вход элемента 11ПИ 18, С единичного выхода триггера 16 формируется сигнал Зацикливание на выход 26 устройства, с нулевого выхода триггера снимается единичный сигнал, в результате чего закрывается элемент И 19, и с второго входа элемента И 3 снимается сигнал разрешающий прохождение тактового импульса с входа 1 на считывание микрокоманд - происходит останов мя ропрограммного устройства управления. Одновременно сигнал со схемы 12 сравнения через элемент ИЛИ 18 поступает на управляющий вход регис 11 адреса устройства, вызывая считывание адреса, по которому произошло зацикливание, на выход 27 устройства Индикация адреса, Аналогично происходит сравнение кода предыдущей и очередной команд на схеме 13 сравнения: по окончании считывания очередной микрокоманды с блока 23 памяти микрокоманд на ег выходе устанавливается код очередной команды и происходит сравнение кода предыдущей команды, записанной на регистре 10, и кода очередно команды, поступающей на схему 13 сравнения с выхода микроопераций , блока 23 памяти микрокоманд. При равенстве указанных кодов команд
0 5 о
5
0
5
0
526
схема 13 сравнения формирует сигнал ошибки, который поступает на единичный вход триггера 15 и на вход второго элемента ИЛИ 18. С единичного выхода триггера 15 формируется сигнал Команда на выход 24 устройства, с нулевого выхода триггера снимается единичный сигнал, в результате чего зак1Я)1вается элемент И 19 и с второго входа первого элемента И 3 снимается сигнал, разрешающий прохождение тактового импульса с входа 1 на микропрограммное устройство управления. Происходит его останов, как и в первом случае при зацикливании программы. Одновременно сигнал со схемы 13 сравнения через вход второго элемента ИЛИ 18 посту-. пает на вход считывания регистра 11 адреса устройства, вызывая считывание адреса, на котором произошло сравнение кодов команд, на выход 27 устройства Индикация адреса, Элемент 5 задержки должен обеспечить задержку тактового импульса на время считывания адреса с регистра 22 адреса микропрограммного автомата, а элемент 6 задержки обеспечивает задержку импульса с элемента 5 на время считывания кода команды блока микроопераций блока 23 памяти микрокоманд и установление триггера 14 в единичное состояние.
Контроль ошибок, вызванных физическими отказами элементов устройства, заключается в проверке наличия сигналов микроопераций в операционной части микрокоманды контролируемого устройства. При отсутствии сигналов на выходах микроопераций устройство формирует сигнал ошибки,
В устройстве микропрограммного управления обнаруживается отсутствие сигналов микроопераций на выходе блока 23 памяти следующим образом. Каждый тактовый импульс через элемент И 3 устанавливает первый триггер 1i4 в нулевое состояние. Сигнахи команд операционной части микрокоманды через элемент ИЛИ 4 устанавливают триггер 14 в единичное состояние и запрещают прохождение тактового импульса, задержанного элементами 5 и 6 задержки, через элемент И 17 для формирования сигнала ошибки. Элементы 5 и 6 задержки должны обеспечить задержку
тактового импульса на время считывания адреса с регистра 22 адреса, команды с блока 23 памяти микрокоманд и установление триггера 14 в единичное состояние.
При отсутствии сигналов на выходах микроопераций блока 23 к моменту прихода на элемент И 17 задержанного тактового импульса триггер 14 находится в нулевом состоянии (нет сигнала на выходе элемента ИЛИ 4), следовательно, элемент И 17 открыт и на его выходе появляется сигнал ошибки, который поступает на выход 25 устройства Отказ и через
элемент ИЛИ 18 на счетный вход регистра 11 адреса устройства, вызывая считывание на выход 27 устрой г
ства Индикация адреса адреса команды, на которой произошел отказ микропрограммного устройства управления. Одновременно с единичного выхода триггера 14 снимается
единичный сигнал, что приводит к закрытию элемента И 19, и с второго входа первого элемента И 3 снимается сигнал, разрешающий прохождение тактового импульса с входа 1
на микропрограммное устройство управления, и происходит его останов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микропрограммное устройство управления с контролем | 1980 |
|
SU940159A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1130865A1 |
| Микропрограммное устройство управления | 1982 |
|
SU1020825A1 |
| Многотактное микропрограммное устройство управления | 1983 |
|
SU1151963A1 |
| Микропрограммное устройство управления | 1981 |
|
SU1016782A1 |
| Микропрограммное устройство управления с контролем | 1983 |
|
SU1140121A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1130864A1 |
| Микропрограммное устройство управления с контролем | 1983 |
|
SU1270772A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1104515A1 |
| Микропрограммное устройство управления | 1981 |
|
SU968814A1 |
Редактор О.Юрковецкая
Составитель А, Сиротская Техред А.Бойко
Заказ 8418/52
Тираж 709Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035,.Москва, Ж-35, Раушская наб., д. 4/5
Филиал ПОП Патент, г. Ужгород, ул. Проектная, 4
Корректор Л.
| 0 |
|
SU391563A1 | |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Микропрограммное устройство управления с контролем | 1980 |
|
SU940159A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
