Изобретение относится к подъемнотранспортному машиностроению, а именно к вакуумным грузозахватным устройствам, и предназначено для захвата, подъема и транспортирования штучных грузов с плоской поверхностью.
По основному авт.св.№1054269 известен вакуумный захват, содержащий полый корпус и эластичную кольцевую диафрагму, разделяющую полость корпуса на камеры, одна из которых посредством штуцера соединена с источником вакуума, а в другой, сообщенной посредством патрубка и запорного вентиля с помощью штуцера, установлены упругие в вертикальном направлении элементы. Захват позволяет осуществлять подъем и транспортирование изделий, размер которых больше корпуса захвата, а также малогабаритных изделий размером меньше основного KopnycaftJ
Однако конструкция известного захвата ограничивает его функциональвые возможности, так как рабочая вакуумная камера захвата может быть практически только двух размеров. При этом обеспечивается транспортирование малогабаритных или крупногабаритньк грузов и не обеспечивается транспортировка грузов, имеющих промежуточные размеры.
Цель изобретения - расширение типоразмеров захватываемьк изделий.
Указанная цель достигается тем, что в вак 5пмном захвате упругие элементы расположены концентрическими рядами, внутри каждого элемента установлен шток, подвижный в вертикальном направлении, а на корпусе закреплен фиксатор положения верхнего конца штока.
Кроме того,фиксатор положения, конда штока представляет собой соленоид
На фиг.1 изображен захват положение для транспортирования грузов, габариты которых значительно меньше габаритов захвата J на фиг.2 - то же, положение для транспортирования грузов средних габаритов; на фиг.З - то же, положение для транспортирован грузов, габариты которых значительно превьш ают размеры захвата.
Вакуумньй захват состоит из корпуса 1 , центрального штуцера 2 и эластичной диафрагмы 3, которая разделяет корпус на камеры рабочую А и вспомогательную Б.. Камера Б соединена с центральным штуцером 2 каналом 4 через запорный орган 5. Диафрагма 3 закреплена (с помощью клея или механическим способом) внутри корпуса 1 и на центральном штуцере 2. Диафрагма 3 изогнута в камеру А с помощью упругих в вертикальном направлении элементов (пружин) 6, так, что она выступает за плоскость опорной поверхности 7 корпуса и контактирует с транспортируемым грузом 8. На корпусе 1 снизу закреплено (с помощью клея или механическим способом) эластичное уплотнительное кольцо 9, контактирующее опорной поверхностью 7, с транспортируемы грузом, выполненное из губчатой резин закрытой с боковой стороны воздухонепроницаемой пленкой.
На корпусе 1 (в полости В),. размещен механизм 10 регулирования длины упругих элемейтов (например, электромагнитный) Полости Б и В сообщаются каналами 11, чере которые проходят штоки 12 механизма регулирования
длины упругих элементов.
Захват работает следующим образом.
Лля транспортирования малогабаритных грузов (фиг.1) электромагниты механизма регулирования длины упругих элементов, расположенных в центральной части захвата, отключены, сами упругие элементы находятся в разжатом состоянии. Электромагниты упругих элементов, расположенньк в периферийной части захвата, включены, упругие элементы поджаты. Полость Б через запорный орган 5 соединяют с источником вакуума, для чего запорный орган 5 открывают, а центральный штуцер со стороны камеры А перекрывают. Шту-. цер может быть перекрыт, например, с помощью автоматического отсечного клапана (не показан), который закрываетсяопри заданной разности давлений под клапаном и над ним. Диафрагма 3 под действием разности давлений перемещается внутрь корпуса 1 и занимает положение, изображенное на фиг.1. Запорный орган 5 закрывают, сохраняя находящийся в камере Б вакуум и занятое диафрагмой 3 положение. Захват накладывают на транспортируемый груз 8, диафрагма 3 прижимается к поверхности груза, пружинами 6 камеру А соединяют с источником вакуума. Захват присасывается к грузу 8. Разгерметизация захвата (отпуск груза -осуществляется соединением камеры А с атмосферой. При последующих циклах- работы с малогабаритными грузами запорный орган 5 остается закрытьм. Для транспортирования груз.ов сре них размеров (фиг.2) электромагниты механизма регулирования длины упругих элементов, расположенных в пери ферийной части захвата, отключены, упругие элементы разжаты. Электромагниты упругих элементов, распояоженных в центральной части, включен упругие элементы поджаты. Полость Б через запорный орган 5 соединяют с точником вакуума, запорный орган 5 крывают, сохраняя находящийся в камере Б вакуум и занятое диафрагмой 3 положение (фиг.2). Захват наклады вается на транспортируемый груз 13, диафрагма 3 прижимается к поверхности груза пружинами 6. Камеру А соединяют с источником вакуума Зах ват присасывается к ГРУЗУ П t J у1-. Разгерметизация захвата осуществляется соединением камеры А с атмосферой. При последующих циклах работы с грузами средних размеров запорный орган 5 остается закрытым. Для транспортирования крупногабар.кь« .р,зо, (Ф„;.з) злек;; ;;;;;: ™ механизма оегупмпопянио ,тг,„г,, „„«„ механизма регулирования длины всех упругих элементов включены, все упругие элементы поджаты. Полость Б через запорный орган 5 соединяют с источником вакуума, запорный орган 5 закрывают, сохраняя находящийся в камере Б вакуум и занятое диафрагмой 3 положение. Захват накладывается на транспортируемый груз 14. 763 ОНорная поверхность 7 корпуса 1 входит в контакт с поверхностью груза 14, зластичное уплотнительное кольцо 9 герметизирует стык между корпусом 1 и грузом 14. Камера А сообщается .с источником вакуума,вследствие чего устройство присасывается к грузу 14. Разгерметизация захвата (отпуск груза) производится соединением камеры А с атмосферой. При последующих циклах работы с крупногабаритными грузами запорный орган 5 остается закрытым. При соединении камеры А с источни,ком вакуума (в камере Б уже имеется i Б уже имеется ) перемещение диафрагмы 3 в стоL°.. ° действием не эначительно,. так как это перемещение влечет за собой увеличение объема камеры Б, и, следовательно, должно сопровождаться понижением давления в этой полости. Для подъема и транспортирования груза, габарит которых меньше размеров основного корпуса захвата, конструк« «««ого корпуса захвата, конструкЦия позволяет, при необходимости, Т«ГТТ1ЛТТЛИТ Г. лл. тем включения соответствующих электромагнитов формировать с помощью упругих элементов уплотняющую кромку в зависимости от контура в плане транспортируемых грузов, например, в виде окружности, треугольника, многоугольника и т.д. Применение вакуумных грузозахватных устройств предлагаемой конструкции уменьшить коли дз l UJirl - чество грузоподъемных устройств, нахоящихся в эксплуатации, так как предагаемое устройство позволит произодить подъем и транспортирование груов различных габаритов и массы, а таке значительно сократить время на пееналадку устройства для работы с груами другогс габарита и, следовательно, овысить производительность труда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1982 |
|
SU1054269A1 |
| Вакуумный захват | 1983 |
|
SU1105438A2 |
| Вакуумный захват | 1984 |
|
SU1284930A1 |
| Вакуумный захват | 1983 |
|
SU1113352A1 |
| Вакуумный захват | 1984 |
|
SU1152910A2 |
| Вакуумный захват | 1982 |
|
SU1070112A1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1094831A1 |
| Вакуумный электромагнитный захват | 1984 |
|
SU1204538A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1993 |
|
RU2048418C1 |
| Вакуумный захват | 1986 |
|
SU1393635A1 |
1. ВАКУУМНЫЙ - ЗАХВАТ по авт.св. К1054269, отличающийся тем, что, с целью расширения ти1г1оразмеров захватываемых изделий, упругие элементы расположены концентрическими рядами, внутри каждого элемента установлен шток, подвижньй в вертикальном направлении, a на корпусе закреплен фиксатор положения верхнего конца штока. 2. Захват поп.1, отличающийся тем, что фиксатор положения конца штока представляет собой соленоид.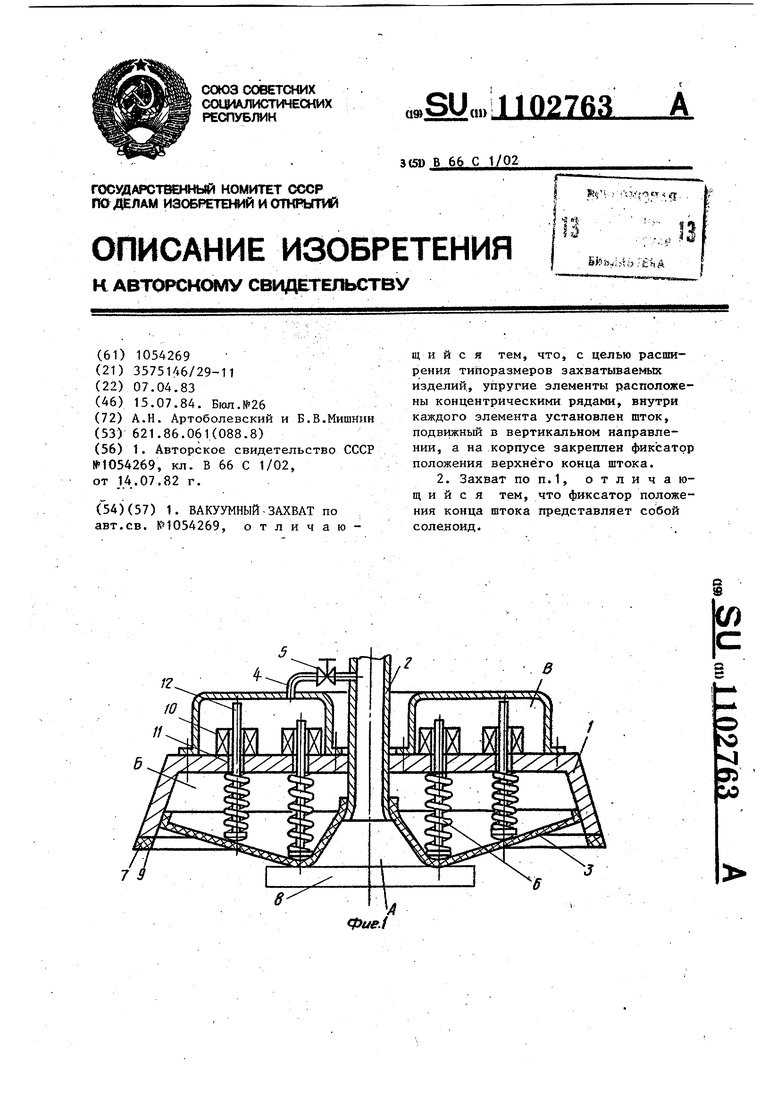
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вакуумный захват | 1982 |
|
SU1054269A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
