1
Изобретение относится к приборостроению и средствам автоматики и может быть применено при реализации частоты вращения электродвигателя.
Цель изобретения - повышение быстродействия и точности системы.
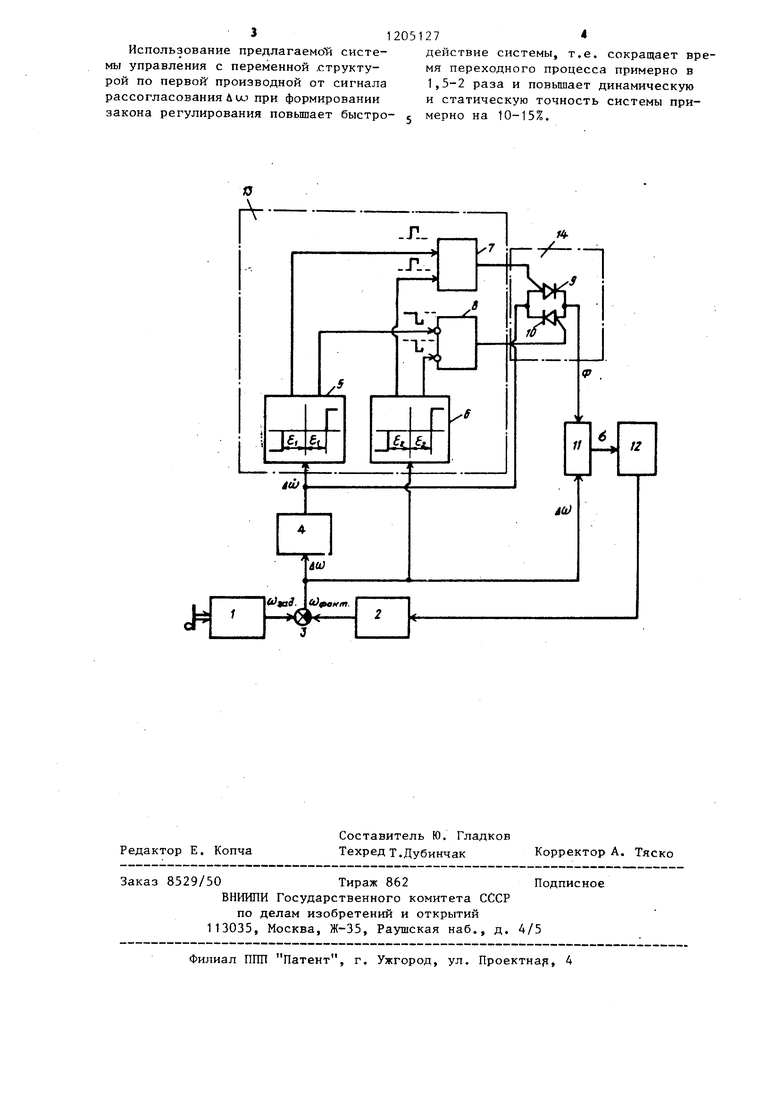
На чертеже изображена блок-схема системы.
На схеме обозначены задатчик 1, датчик 2 главной обратной связи, измеритель 3 рассогласования, дифференциатор 4, первый и второй трех- позиционные релейные элементы 5 и 6, {tepBbift и второй элементы И 7 и 8, дервый и второй управляемые диоды 0 и 10, суммирующий усилитель 11, сервомеханизм 12, релейный блок 13 управления, коммутатор t y ,.f доходные сигналы задатчика Т и датчика 2 главной обратной связи системы, &ib- выходной сигнал дифференциатора 4,й.ш- выходной сигнал измерителя 3 рассогласования, б - выходной сигнал суммирующего усилителя 1 ф- выходной сигнал коммутатора 14, и BI- зоны нечувствительности первого и второго трехпозиционных релейных элементов 5 и 6.
В состав релейного блока 13 управления вхЬдят первый и второй трехпо- зиционные релейные элементы 5 и 6 и первьп и второй элементы И 7 и 8.
В состав коммутатора 14 входят первьм и второй управляемые диоды 9 и 10.
Сервомеханизм 12 содержит параллельные и последовательные звенья, усилитель мощности, исполнительный двигатель и редуктор и может быть построен по известной стандартной функциональной схеме.
Система работает следующим образом.
На выходе задатчика 1 формируется заданное значение регулируемого параметра, например частоты. На выходе датчика 2 главной обратной связи формируется текущее значение регулируемого параметра, например частоты. Выходные сигналы задатчика 1 и датчика 2 главной обратной связи поступают «а входы иГйcoAi/ j прий(. I i (илиuu)-.(. , Г7РИ-gj. г или- frti Я,
, ПРИ HQt MWAUj; f2HiU3 -(.
051272
мерителя 3 рассогласования, в котором сравниваются.
Выходной сигнал измерителя 3 рассогласования поступает на вход диф- 5 ференциатора 4 без второго трехпо- зиционного релейного эле 1ента 6 и первьм вход суммирующего усилителя 11
Выходной сигнал дифференциатора 4 поступает на вход первого трех- позиционного релейного элемента 5 и на сигнальный вход коммутатора 14.
10
Первый 5 и второй 6 трехпозицион- ные элементы совместно с первым 7 и вторым 8 элементами И в совокупности представляют релейный блок управ
ления, который анализирует знаки сигналов ло; и UU5 и их величину относительно зоны нечувствительности, определяемой значениями ,и г. Если и Л wj, то срабатывают релейные элементы 5 и 6, с первых выходов которых поступают положительные сигналы на входы элемента И 7. .При этом элемент И 7 срабатывает, и на его выходе формируется сигнал, подаваемый на управляющий вход первого управляемого диода 9, под воздействием которого он открывается и пропускает сигналите на второй вход суммирующего усилителя 11, где сигнал л LG и сигнал йсисуммируется, усиливаются и поступают на вход сервомеханизма 12. Если &Lui- i и , то также срабатывают релейные элементы 5 и 6, с вторых выходов которых поступают отрицательные сигналы на инвертирующий вход элемента И 8. Далее система работает аналогично но вместо управляемого диода 9 срабатывает управляемый диод 10. Иначе работает система, если c. , илидоил- г. и л .В этом случае элементы И 7 и 8 не срабатывают, и управляемые диоды 9 и 10 остаются в закрытом положении, а с выхода усилителя - 1 1 на вход сервомеханизма 12 поступает только усиленный сигнал лw. В общем случае сигнал регулирования ( з ), поступающий на вход сервомеханизма 12, формируется следующим образом:
Использование предлагаемо й системы управления с переменной .структурой по первой производной от сигнала рассогласования А u-i при формировании
закона регулирования повышает быстро-
1205127
действие системы, т.е. сокращает время переходного процесса примерно в 1,5-2 раза и повышает динамическую и статическую точность системы при
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор для инерционных объектов | 1973 |
|
SU446026A1 |
| Многоканальный регулятор | 1983 |
|
SU1092472A1 |
| Устройство для регулирования технологических параметров по заданной программе | 1983 |
|
SU1136121A1 |
| Система управления | 1987 |
|
SU1423979A1 |
| Программный регулятор | 1985 |
|
SU1247840A1 |
| Позиционный регулятор для систем с запаздыванием | 1985 |
|
SU1283709A1 |
| Устройство для регулирования водоподачи для орошения в каскаде насосных станций | 1987 |
|
SU1499324A1 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| Устройство управления поворотом тракторного агрегата | 1988 |
|
SU1575971A1 |
| Импульсная следящая система | 1986 |
|
SU1746359A1 |
Редактор Е. Копча
Составитель Ю. Гладков Техред т.Дубинчак
Заказ 8529/50Тираж 862Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектнар, 4
Корректор А. Тяско
| Устройство для контроля блоков оперативной памяти | 1990 |
|
SU1751821A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Следящая система | 1977 |
|
SU642676A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления инерционным объектом | 1975 |
|
SU519683A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
